You might also like
- CBSE Class 6 Geography All Chapter WorksheetsDocument14 pagesCBSE Class 6 Geography All Chapter WorksheetsGiridhar Ragavasimhan67% (3)
- CBSE Class 6 History All Chapter WorksheetsDocument11 pagesCBSE Class 6 History All Chapter WorksheetsGiridhar Ragavasimhan100% (5)
- Class 7 Art Integrated Work. 2Document1 pageClass 7 Art Integrated Work. 2Giridhar RagavasimhanNo ratings yet
- Robotic Arm SynopsisDocument16 pagesRobotic Arm SynopsisKeshav Arora0% (1)
- Spectrometer Interfaced With ArduinoDocument7 pagesSpectrometer Interfaced With ArduinoAgung Arif Nur WibowoNo ratings yet
- Mathematics HL IB IA ExampleDocument24 pagesMathematics HL IB IA ExampleAnamay Agnihotri43% (7)
- Circuits Virtual LabDocument6 pagesCircuits Virtual Labapi-436597457No ratings yet
- Effect Pedal GroundingDocument10 pagesEffect Pedal GroundingFooNo ratings yet
- Robot With SensorsDocument3 pagesRobot With SensorschandruNo ratings yet
- DLD ManualDocument45 pagesDLD ManualMuhammad UmerNo ratings yet
- Final Project Report: F.O.B.O Floppy Box Robot An Experiment A.I and Machine LearningDocument44 pagesFinal Project Report: F.O.B.O Floppy Box Robot An Experiment A.I and Machine LearningPotnuru VinayNo ratings yet
- Line Follower Robot ProjectDocument6 pagesLine Follower Robot ProjectPravin GaretaNo ratings yet
- Line Follower RobotDocument30 pagesLine Follower RobotNeetu Bansal100% (6)
- Line Follower SynopsisDocument14 pagesLine Follower SynopsisAshmeet SabbyNo ratings yet
- MBlock Using The Sensors ProgramsDocument14 pagesMBlock Using The Sensors ProgramsKang Rossy Mangz OchieNo ratings yet
- CS223 Laboratory Assignment 1 Digital Circuits: Logic To GatesDocument7 pagesCS223 Laboratory Assignment 1 Digital Circuits: Logic To GatesYarkin ErginNo ratings yet
- Line Follower RobotDocument29 pagesLine Follower RobotSebastin AshokNo ratings yet
- Green EnergyDocument13 pagesGreen EnergyAlin ÒóNo ratings yet
- Smartphone Controlled Arduino Rover PDFDocument30 pagesSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
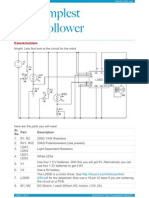
- The Simplest Line Follower: ConstructionDocument5 pagesThe Simplest Line Follower: Constructionapi-115728880No ratings yet
- Logic Game-OddmanoutDocument17 pagesLogic Game-OddmanoutJhazmine SarmientoNo ratings yet
- Autonoums Robotics Part 1: IR Led Detector CKTDocument14 pagesAutonoums Robotics Part 1: IR Led Detector CKTSameer SalamNo ratings yet
- About Optoisolator IC and The Right Way To Test It: ComputerDocument14 pagesAbout Optoisolator IC and The Right Way To Test It: ComputerJamal JardelNo ratings yet
- Mahendra Engineering College (Autonomous) : Yaswanth Kumar.SDocument10 pagesMahendra Engineering College (Autonomous) : Yaswanth Kumar.SYãshNo ratings yet
- Experiment 3 FinalDocument13 pagesExperiment 3 Finalhello876230% (1)
- Robo TX Training Lab enDocument20 pagesRobo TX Training Lab enm_scribd_20100% (1)
- Line Follower RobotDocument10 pagesLine Follower Robotvishal groverNo ratings yet
- Lesson Plan Robots 1Document6 pagesLesson Plan Robots 1ddildine11100% (1)
- Robotics PDFDocument19 pagesRobotics PDFGiovanna PerezNo ratings yet
- ANN - Session 2 CO 1Document9 pagesANN - Session 2 CO 1joxekojNo ratings yet
- Experiment No10 Simulation of Photodiode Using MATLAB SIMULINKDocument3 pagesExperiment No10 Simulation of Photodiode Using MATLAB SIMULINKVaishnavi muralliNo ratings yet
- Robotics Club (Rtist)Document26 pagesRobotics Club (Rtist)Ashish MaddheshiyaNo ratings yet
- Zhou Weihua 20011653 PW2 Lab ReportDocument11 pagesZhou Weihua 20011653 PW2 Lab ReportAtteya AzmiNo ratings yet
- Lab ECE 2Document10 pagesLab ECE 2zhambyl.muratkhanNo ratings yet
- Wiring Circuits From SchematicsDocument11 pagesWiring Circuits From SchematicsVhincent SjNo ratings yet
- LTspice Tutorial Part 4 - Intermediate CircuitsDocument23 pagesLTspice Tutorial Part 4 - Intermediate Circuitsante mitarNo ratings yet
- Lab ManualDocument83 pagesLab ManualLucas EtienneNo ratings yet
- Voltmeter Usage: Self-Learning Module Lab 01:basic Concepts and Test EquipmentDocument15 pagesVoltmeter Usage: Self-Learning Module Lab 01:basic Concepts and Test EquipmentChing Ramirez - NoceteNo ratings yet
- Electrical EngineeringDocument8 pagesElectrical EngineeringMashood PNo ratings yet
- Balancing Robot: SelfDocument17 pagesBalancing Robot: SelfsheshankNo ratings yet
- PresentationDocument32 pagesPresentationPato AcevedoNo ratings yet
- Rotary MAX Motors 1 Motors 2 Motors 3 Motors 4: LED SensingDocument7 pagesRotary MAX Motors 1 Motors 2 Motors 3 Motors 4: LED SensingHugo Reyes OrtizNo ratings yet
- Lab 2 - Flashlight Follower: ObjectiveDocument6 pagesLab 2 - Flashlight Follower: ObjectiveChristian OrtizNo ratings yet
- 1 Introduction (No Marks)Document13 pages1 Introduction (No Marks)HongweiNo ratings yet
- Control Systems Laboratory: EXP (8) Analogue ComputerDocument9 pagesControl Systems Laboratory: EXP (8) Analogue ComputerAhmed Mohammed khalfNo ratings yet
- Activity Module 1 (LED)Document39 pagesActivity Module 1 (LED)naughty dela cruzNo ratings yet
- Experiment 11Document8 pagesExperiment 11Mihai BogdanNo ratings yet
- Complex EngineeringDocument5 pagesComplex EngineeringSYED TAYYAB ALI SHAHNo ratings yet
- Lab 1Document12 pagesLab 1Ayush yadavNo ratings yet
- Activity Module 1 (LED)Document39 pagesActivity Module 1 (LED)naughty dela cruzNo ratings yet
- Aplicación InformáticaDocument3 pagesAplicación InformáticaMari Luz Martín GarrudoNo ratings yet
- Lec Notes Nptel IitDocument16 pagesLec Notes Nptel IitAnupam rajNo ratings yet
- PLC Ladder Simulator PDFDocument15 pagesPLC Ladder Simulator PDFDonate DonateNo ratings yet
- Project Report: Line Following RobotDocument12 pagesProject Report: Line Following RobotAhsan MuradNo ratings yet
- 17 - de Journal - EcsDocument48 pages17 - de Journal - EcsPrakalp JhaNo ratings yet
- Lab Manual Year 1Document123 pagesLab Manual Year 1Roselee Ann Montevirgen100% (1)
- Line Maze Solving RobotDocument10 pagesLine Maze Solving Robottcteh86No ratings yet
- Line Robot FollowerDocument23 pagesLine Robot Followeratul mishra100% (1)
- Electrical Machine 1 Semi FinalDocument21 pagesElectrical Machine 1 Semi FinalSegie CastroNo ratings yet
- LabBJTandH BridgeDocument8 pagesLabBJTandH BridgeAndrew BuckleyNo ratings yet
- Physical Evaluation Checklist For NurseDocument3 pagesPhysical Evaluation Checklist For NurseGiridhar RagavasimhanNo ratings yet
- RadhikaDocument2 pagesRadhikaGiridhar RagavasimhanNo ratings yet
- AdverbsDocument2 pagesAdverbsGiridhar RagavasimhanNo ratings yet
- News LetterDocument2 pagesNews LetterGiridhar RagavasimhanNo ratings yet
- Is Matter Around Us PureDocument16 pagesIs Matter Around Us PureGiridhar RagavasimhanNo ratings yet
- CRE Road MapDocument1 pageCRE Road MapGiridhar RagavasimhanNo ratings yet
- Duties of NursesDocument1 pageDuties of NursesGiridhar RagavasimhanNo ratings yet
- State Consultant For Inclusive Education Samagra Shiksha Govenrment of TamilnaduDocument4 pagesState Consultant For Inclusive Education Samagra Shiksha Govenrment of TamilnaduGiridhar RagavasimhanNo ratings yet
- Draft Roles & ResponsibilitiesDocument2 pagesDraft Roles & ResponsibilitiesGiridhar RagavasimhanNo ratings yet
- Social Welfare Department (Integrated Child Development Services)Document3 pagesSocial Welfare Department (Integrated Child Development Services)Giridhar RagavasimhanNo ratings yet
- Sorting Materials Into Groups Class 6 Extra Questions Short Answer Typ1 2Document7 pagesSorting Materials Into Groups Class 6 Extra Questions Short Answer Typ1 2Giridhar RagavasimhanNo ratings yet
- CBSE Class 9 Physics Worksheet - Force and Laws of MotionDocument3 pagesCBSE Class 9 Physics Worksheet - Force and Laws of MotionGiridhar RagavasimhanNo ratings yet
- Acids QPDocument6 pagesAcids QPGiridhar RagavasimhanNo ratings yet
- Sorting Materials Into Groups Class 6 Extra Questions Short Answer TypeDocument3 pagesSorting Materials Into Groups Class 6 Extra Questions Short Answer TypeGiridhar RagavasimhanNo ratings yet
- My Winning ResumeDocument1 pageMy Winning ResumeGiridhar RagavasimhanNo ratings yet
- CBSE Class 4 Maths Revision Worksheet (124) - Metric MeasuresDocument4 pagesCBSE Class 4 Maths Revision Worksheet (124) - Metric MeasuresGiridhar Ragavasimhan67% (3)
- Date of Lesson: 28/2/2021 by Suneetha Grade Level Being Taught: 6Document12 pagesDate of Lesson: 28/2/2021 by Suneetha Grade Level Being Taught: 6Giridhar RagavasimhanNo ratings yet
- Acids QPDocument6 pagesAcids QPGiridhar RagavasimhanNo ratings yet
- Class X Math Areas Related To CirclesDocument2 pagesClass X Math Areas Related To CirclesGiridhar RagavasimhanNo ratings yet
- Series CircuitDocument18 pagesSeries CircuitAloiza FababaerNo ratings yet
- Segment 2 QB - AnswersDocument14 pagesSegment 2 QB - Answersavp sNo ratings yet
- A4-P 1.0 enDocument1,020 pagesA4-P 1.0 enTrần Văn Phúc100% (1)
- Calibration Rev5Document34 pagesCalibration Rev5Mehdi RahmatiNo ratings yet
- Acces Point - Ee Refresher 1Document13 pagesAcces Point - Ee Refresher 1christinesarah0925No ratings yet
- Electrical Distribution System TopicsDocument20 pagesElectrical Distribution System TopicsIvar Nilasta100% (2)
- Electrical Resistance Lecture 2Document5 pagesElectrical Resistance Lecture 2bigbang0% (1)
- Disclosure To Promote The Right To InformationDocument13 pagesDisclosure To Promote The Right To InformationSakthivel MurthyNo ratings yet
- 2 EquipmentList MV MCCDocument6 pages2 EquipmentList MV MCCRodrigoCastilloAcostaNo ratings yet
- Steinmetz, Charles Proteus - Electric Discharges Waves and ImpulsesDocument172 pagesSteinmetz, Charles Proteus - Electric Discharges Waves and ImpulsesVoicu StaneseNo ratings yet
- Eto Mix Question & AnswersDocument14 pagesEto Mix Question & AnswersKidanemariam TeseraNo ratings yet
- Lab 2 - Ohm LawDocument4 pagesLab 2 - Ohm LawDương Mạnh QuỳnhNo ratings yet
- Ca Series: Proven ReliabilityDocument7 pagesCa Series: Proven ReliabilityHari NurcahyadiNo ratings yet
- Physics II Reviewer PDFDocument6 pagesPhysics II Reviewer PDFShook AfNo ratings yet
- ABB Protection Modules, Surge Protection Series 20 000, DIN 1-3Document2 pagesABB Protection Modules, Surge Protection Series 20 000, DIN 1-3EliasNo ratings yet
- Testing Requirements of GlovesDocument2 pagesTesting Requirements of Glovesjonnyh85No ratings yet
- Lecture 2: Active and Passive Circuit Elements (Resistors Only)Document7 pagesLecture 2: Active and Passive Circuit Elements (Resistors Only)Huzaifa RehanNo ratings yet
- Specific Heat Capacity Experiment PaperDocument7 pagesSpecific Heat Capacity Experiment PaperCrocky CookNo ratings yet
- GT26CW MPTestDocument52 pagesGT26CW MPTestamir barekatiNo ratings yet
- Mvaj 05 10 20 Manual GBDocument38 pagesMvaj 05 10 20 Manual GBsamlash100% (2)
- Summer Assignment Class XDocument10 pagesSummer Assignment Class XKayNo ratings yet
- Sr. No. Name of The Experiment No.: Se-E&Tc Electrical Circuits and Machines List of ExperimentsDocument13 pagesSr. No. Name of The Experiment No.: Se-E&Tc Electrical Circuits and Machines List of ExperimentsjitbakNo ratings yet
- Experiment 2Document9 pagesExperiment 2Jusman MuktarNo ratings yet
- EEA101 CO1 ConceptsDocument21 pagesEEA101 CO1 ConceptsKevin Carl CapalarNo ratings yet
- AC MachinesDocument30 pagesAC MachinesAnonymous 5GBBc45No ratings yet
- Barton Model 6001 & 6002 Differential Pressure Transmitter and Flow Transmitter PDFDocument10 pagesBarton Model 6001 & 6002 Differential Pressure Transmitter and Flow Transmitter PDFsaulNo ratings yet
- Section Study Guide: Teacher Notes and AnswersDocument4 pagesSection Study Guide: Teacher Notes and Answersmahsan abbasNo ratings yet
- Electricity Practice TestDocument4 pagesElectricity Practice Testashleysykes2No ratings yet
- L&T Gemini CatalogDocument2 pagesL&T Gemini Catalogkatiki216No ratings yet