You might also like
- LecturesDocument701 pagesLecturesAlanJohnHNo ratings yet
- MATH12 Spherical Trigonometry by JohnsonDocument19 pagesMATH12 Spherical Trigonometry by JohnsonPaolo GochingcoNo ratings yet
- Projective GeometryDocument366 pagesProjective Geometryhummingbird_hexapla100% (5)
- Elementos de Euclides PDFDocument1,441 pagesElementos de Euclides PDFquiubomen100% (1)
- Percolation Theory by Benjamin HansenDocument41 pagesPercolation Theory by Benjamin Hansenbenhansen09No ratings yet
- How to Construct Platonic, Archimedean and Stellated PolyhedraFrom EverandHow to Construct Platonic, Archimedean and Stellated PolyhedraNo ratings yet
- Origami SDocument214 pagesOrigami Scarolina.santiagoNo ratings yet
- Projective Geometry PDFDocument366 pagesProjective Geometry PDFHello World100% (2)
- What Is Knot Theory and Why Is It Important in MathematicsDocument16 pagesWhat Is Knot Theory and Why Is It Important in MathematicsAnselmo HansNo ratings yet
- An Introduction To FractalsDocument25 pagesAn Introduction To FractalsDimitar DobrevNo ratings yet
- Clifford AlgebrasDocument228 pagesClifford Algebrasjoseamh6906224780% (5)
- Plane and Fancy GeometryDocument168 pagesPlane and Fancy GeometryLucas GallindoNo ratings yet
- Fractal Structures Janez PodhostnikDocument15 pagesFractal Structures Janez PodhostnikgnanalakshmiNo ratings yet
- An Elementary Course in Synthetic Projective GeometryFrom EverandAn Elementary Course in Synthetic Projective GeometryNo ratings yet
- Getting Started With Oculus Quest 2Document7 pagesGetting Started With Oculus Quest 2Yasser AbrahantesNo ratings yet
- T. Wedhorn. Manifolds, Sheaves, and CohomologyDocument366 pagesT. Wedhorn. Manifolds, Sheaves, and Cohomologybobrovskiialeksei1No ratings yet
- Growing fascination with technology and data scienceDocument1 pageGrowing fascination with technology and data scienceVipul KotiNo ratings yet
- The Uses and Abuses of The History of Topos TheoryDocument25 pagesThe Uses and Abuses of The History of Topos TheorybleximNo ratings yet
- Higher Geometry: An Introduction to Advanced Methods in Analytic GeometryFrom EverandHigher Geometry: An Introduction to Advanced Methods in Analytic GeometryNo ratings yet
- HomotopyDocument72 pagesHomotopyfalcon_vamNo ratings yet
- Timothy T. Chow and C. Kenneth Fan - The Power of Multifolds - Folding The Algebraic Closure of The Rational NumbersDocument9 pagesTimothy T. Chow and C. Kenneth Fan - The Power of Multifolds - Folding The Algebraic Closure of The Rational NumbersEduardo MullerNo ratings yet
- Selected Topics in Three-Dimensional Synthetic Projective Geometry-Introduction, References, and IndexDocument18 pagesSelected Topics in Three-Dimensional Synthetic Projective Geometry-Introduction, References, and IndexjohndimNo ratings yet
- The Language of Mathematics: Frank TapsonDocument4 pagesThe Language of Mathematics: Frank TapsonmsatriobudiNo ratings yet
- From A Particular Diagram To A Universal Result: Euclid 'S Elements, Book IDocument8 pagesFrom A Particular Diagram To A Universal Result: Euclid 'S Elements, Book INițceValiNo ratings yet
- Binmore PDFDocument4 pagesBinmore PDFSol Mau B.No ratings yet
- NATO ASI Series. Vol. F17 Fundamental Algorithms For Computer Graphics Edited by R. A. Earnshaw © Springer-Verlag Berlin Heidelberg 1985Document31 pagesNATO ASI Series. Vol. F17 Fundamental Algorithms For Computer Graphics Edited by R. A. Earnshaw © Springer-Verlag Berlin Heidelberg 1985Jessa Nikki MatillanoNo ratings yet
- 1.1 Graph TheoryDocument19 pages1.1 Graph Theoryswarup teliNo ratings yet
- Euclid Book Basic Geometry: 4.1 The Overall Composition of Book IDocument30 pagesEuclid Book Basic Geometry: 4.1 The Overall Composition of Book IKaung MANo ratings yet
- Dimension - WikipediaDocument9 pagesDimension - WikipediaLatika SharmaNo ratings yet
- Using historical models for rainbow educationDocument5 pagesUsing historical models for rainbow educationAlbrecht HeefferNo ratings yet
- Chapter8 Topology UnlockedDocument12 pagesChapter8 Topology UnlockedtfxpNo ratings yet
- A Drill-Book in Trigonometry 1000172770 PDFDocument214 pagesA Drill-Book in Trigonometry 1000172770 PDFGautam Dutta100% (1)
- Fractal Geometry-An IntroductionDocument5 pagesFractal Geometry-An IntroductionNiraj KumarNo ratings yet
- Urbanik - A Brief Introduction To Schemes and SheavesDocument16 pagesUrbanik - A Brief Introduction To Schemes and SheavesVladimir EgorovNo ratings yet
- Elementary Course 033577 MBPDocument146 pagesElementary Course 033577 MBPBranko NikolicNo ratings yet
- Dimension PDFDocument10 pagesDimension PDFAndreGuilhermeNo ratings yet
- T I WillmoreDocument2 pagesT I WillmoreankitNo ratings yet
- Geb v3 2Document8 pagesGeb v3 2italianmonkey14No ratings yet
- Ciencia de MoultonDocument2 pagesCiencia de MoultonGia OrionNo ratings yet
- Dan Kalman - An Elementary Proof of Marden's TheoremDocument9 pagesDan Kalman - An Elementary Proof of Marden's TheoremnativadeperuNo ratings yet
- Lesson 3: Understanding Flat, Spherical & Hyperbolic SpaceDocument63 pagesLesson 3: Understanding Flat, Spherical & Hyperbolic SpaceJplNo ratings yet
- Old Problem About Algebraic Curves Falls To Young Mathematicians Quanta MagazineDocument9 pagesOld Problem About Algebraic Curves Falls To Young Mathematicians Quanta Magazineanibalferreira_53No ratings yet
- A Theory of Origami World : Takeo KanadeDocument33 pagesA Theory of Origami World : Takeo KanadeHermogensNo ratings yet
- Mathematical Association of AmericaDocument15 pagesMathematical Association of AmericaMiguel Angel Hanco ChoqueNo ratings yet
- Field Theory by Pete ClarkDocument109 pagesField Theory by Pete ClarkhackerwoNo ratings yet
- 2020 K46 ReportDocument39 pages2020 K46 ReportSachinNo ratings yet
- Fundamental Theorem of Algebra Explained for StudentsDocument25 pagesFundamental Theorem of Algebra Explained for StudentsKhen Mehko OjedaNo ratings yet
- Regge Calculus For GravitationDocument27 pagesRegge Calculus For GravitationNISSIBETINo ratings yet
- TG 050908Document74 pagesTG 050908J Luis MlsNo ratings yet
- Some Thoughts On Geometries and On The Nature of The Gravitational FieldDocument25 pagesSome Thoughts On Geometries and On The Nature of The Gravitational FieldTarcio Fonseca FurtadoNo ratings yet
- CantorDocument32 pagesCantorPHALSAPHAHNo ratings yet
- History of Integral CalculusDocument7 pagesHistory of Integral Calculusjohn kenneth arlandoNo ratings yet
- Topology and GroupsDocument74 pagesTopology and GroupsPhilip PattersonNo ratings yet
- Doughnuts: Theoretical Primitives, Shimla: Indian Institute of Advanced Study, 2001, Pp. 41-51.)Document10 pagesDoughnuts: Theoretical Primitives, Shimla: Indian Institute of Advanced Study, 2001, Pp. 41-51.)shulamita sapedaNo ratings yet
- Figure 12.9 The Arrows Show Which Theories Are Dual To OthersDocument1 pageFigure 12.9 The Arrows Show Which Theories Are Dual To OthersDenzel WillingtonNo ratings yet
- Unit 2Document10 pagesUnit 2agre226644No ratings yet
- What Is Algebra and What Has It Been in History - FreudenthalDocument13 pagesWhat Is Algebra and What Has It Been in History - FreudenthalHumberto ClímacoNo ratings yet
- The Story of Tangents PDFDocument15 pagesThe Story of Tangents PDFArthadi JayaNo ratings yet
- Concept Formation Is A Creative, Not A Mechanical Passive, Process - . - ADocument18 pagesConcept Formation Is A Creative, Not A Mechanical Passive, Process - . - Aisma damai yantiNo ratings yet
- Triangulation PDFDocument23 pagesTriangulation PDFDominicNo ratings yet
- Teorema de Pitágoras-Nueva DemostraciónDocument3 pagesTeorema de Pitágoras-Nueva DemostraciónMario DalcínNo ratings yet
- Adnan Moon-2010-The Apollonian Circles and Isodynamic Points-14pDocument14 pagesAdnan Moon-2010-The Apollonian Circles and Isodynamic Points-14pMario DalcínNo ratings yet
- Srump-The Independence of Paralell Postulate and Develope of Rigorous ProofDocument13 pagesSrump-The Independence of Paralell Postulate and Develope of Rigorous ProofMario DalcínNo ratings yet
- 00-Ouvrier Buffet-Def-construction and Concept FormationDocument9 pages00-Ouvrier Buffet-Def-construction and Concept FormationMario DalcínNo ratings yet
- Bayazit-2009-Tesis Dr-Prospective Math Teacher Use of Defs in Doing ProofsDocument118 pagesBayazit-2009-Tesis Dr-Prospective Math Teacher Use of Defs in Doing ProofsMario DalcínNo ratings yet
- 000-Alcock-Sompson-Definitions Dealing With Categories MathematicallyDocument7 pages000-Alcock-Sompson-Definitions Dealing With Categories MathematicallyMario DalcínNo ratings yet
- Smarandache-Patrascu-FromNewtonTheorem To A Theorem of The Inscribable Octagon-2013Document5 pagesSmarandache-Patrascu-FromNewtonTheorem To A Theorem of The Inscribable Octagon-2013Mario DalcínNo ratings yet
- Dual Theorem Orthocenter TriangleDocument5 pagesDual Theorem Orthocenter TriangleMario DalcínNo ratings yet
- Boero-Morselli-habermas en Álgebra To Conjeture and Proof-LindoDocument8 pagesBoero-Morselli-habermas en Álgebra To Conjeture and Proof-LindoMario DalcínNo ratings yet
- Smarandache-Conjeturas-p51 Conjets de GeometríaDocument84 pagesSmarandache-Conjeturas-p51 Conjets de GeometríaMario DalcínNo ratings yet
- De Villiers-Equiangular Cyclic and The Equilateral Circumscribed polygons-TMG-n95-v532Document7 pagesDe Villiers-Equiangular Cyclic and The Equilateral Circumscribed polygons-TMG-n95-v532Mario DalcínNo ratings yet
- Kocik Solecki Disentangling - A - Triangle Dualidad Analogía PDFDocument10 pagesKocik Solecki Disentangling - A - Triangle Dualidad Analogía PDFMario DalcínNo ratings yet
- De Villiers-Generalizing The Nagel Line To Circunscribed Polygons by Analogy and Constructive DefiningDocument9 pagesDe Villiers-Generalizing The Nagel Line To Circunscribed Polygons by Analogy and Constructive DefiningMario DalcínNo ratings yet
- Almeida-Proof en Undergraduates Con Ejemplos PDFDocument22 pagesAlmeida-Proof en Undergraduates Con Ejemplos PDFMario DalcínNo ratings yet
- Arquímedes-Resol CúbicaDocument47 pagesArquímedes-Resol CúbicaMario DalcínNo ratings yet
- From Nested Miquel Triangles To Miquel DistancesDocument8 pagesFrom Nested Miquel Triangles To Miquel DistancesMichael de VilliersNo ratings yet
- Claudine Blanchard-CPA - en - AnglaisDocument21 pagesClaudine Blanchard-CPA - en - AnglaisMario DalcínNo ratings yet
- Boero-Book-Theorems-In-School-Indice e IntrodDocument26 pagesBoero-Book-Theorems-In-School-Indice e IntrodMario DalcínNo ratings yet
- Barbin Et al-Book-Produire Et Lire Des Texets de DémostrationDocument5 pagesBarbin Et al-Book-Produire Et Lire Des Texets de DémostrationMario DalcínNo ratings yet
- The Role of Axiomatisation in Mathematics and Mathematics TeachingDocument31 pagesThe Role of Axiomatisation in Mathematics and Mathematics TeachingUdayNo ratings yet
- A Dual To A BMO ProblemDocument3 pagesA Dual To A BMO ProblemMichael de VilliersNo ratings yet
- Bogdanov-Ivlev-Kozhevnikov-On Circles Touching The incircle-JCG2013V2pp43-52Document10 pagesBogdanov-Ivlev-Kozhevnikov-On Circles Touching The incircle-JCG2013V2pp43-52Mario DalcínNo ratings yet
- Josefsson-2010-Calculatioins Concerning The Tangent Lengths and Tangency Chords of A Tangential quadrilateral-FG201013Document12 pagesJosefsson-2010-Calculatioins Concerning The Tangent Lengths and Tangency Chords of A Tangential quadrilateral-FG201013Mario DalcínNo ratings yet
- Coleman-Relación de Áreas Entre Cuadriláteros Entre Un Sexto y Un QuintoDocument4 pagesColeman-Relación de Áreas Entre Cuadriláteros Entre Un Sexto y Un QuintoMario DalcínNo ratings yet
- An Extended Classification of QuadrilateralsDocument4 pagesAn Extended Classification of QuadrilateralsMichael de VilliersNo ratings yet
- 2019-08-28-Complejos y GeometríaDocument14 pages2019-08-28-Complejos y GeometríaMario DalcínNo ratings yet
- Reimagining Retail Commerce in A New Normal World 2023Document16 pagesReimagining Retail Commerce in A New Normal World 2023Beatriz Ochoa RamirezNo ratings yet
- HEAVY DUTY CATALOG - AP TruckDocument81 pagesHEAVY DUTY CATALOG - AP TruckCarlos Andres PachecoNo ratings yet
- Oferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Document3 pagesOferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Librarie PapetarieNo ratings yet
- Classifying Websites as Static or DynamicDocument2 pagesClassifying Websites as Static or DynamicStephanie AquinoNo ratings yet
- Online Interview Questions AnswersDocument4 pagesOnline Interview Questions AnswersafiloteNo ratings yet
- Partes Lexmark MX611Document29 pagesPartes Lexmark MX611مينورمويسيسأرياغاNo ratings yet
- Steval lll012v1Document5 pagesSteval lll012v1Angelė LNo ratings yet
- Hacksaw TypeDocument6 pagesHacksaw TypeZool HilmiNo ratings yet
- Lesson 13 StsDocument11 pagesLesson 13 StsJasmin Lloyd CarlosNo ratings yet
- Computer Terms GlossaryDocument28 pagesComputer Terms GlossaryAngélica AlzateNo ratings yet
- Smart Book Reader For Visual Impairment Person Using Iot DeviceDocument6 pagesSmart Book Reader For Visual Impairment Person Using Iot Devicekomal ziaNo ratings yet
- Intro to Python Programming: Features, Uses & InstallationDocument27 pagesIntro to Python Programming: Features, Uses & InstallationAnkurNo ratings yet
- Brief Operating Instructions Vacuum Switch VS-V-D-PNP: 1 DisplayDocument2 pagesBrief Operating Instructions Vacuum Switch VS-V-D-PNP: 1 DisplayJavier MiramontesNo ratings yet
- Shell Mysella S6 N 40Document2 pagesShell Mysella S6 N 40Muhammad SaputraNo ratings yet
- Simplicity SE Controls - 5127914-UTG-A-0515Document61 pagesSimplicity SE Controls - 5127914-UTG-A-0515Mario LozanoNo ratings yet
- Skywave Idp-690: Pole Star PlatformDocument2 pagesSkywave Idp-690: Pole Star PlatformCarlos CoelhoNo ratings yet
- Inventaris Barang LaboratoriumDocument52 pagesInventaris Barang Laboratoriumlaboratorium rsparagonNo ratings yet
- Release 445 Driver For Windows, Version 445.87Document39 pagesRelease 445 Driver For Windows, Version 445.87Abid ArifNo ratings yet
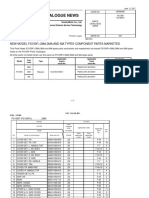
- Honda Motor Co., Ltd. releases new parts catalogue for FS150FJ models in MalaysiaDocument17 pagesHonda Motor Co., Ltd. releases new parts catalogue for FS150FJ models in MalaysiaJimanx Haziman100% (1)
- Bharti Enterprises: Masters of Business AdministrationDocument40 pagesBharti Enterprises: Masters of Business AdministrationNaman JainNo ratings yet
- S7 Communication Between SIMATIC S7-1500 and SIMATIC S7-300: Step 7 V16 / Bsend / BRCVDocument45 pagesS7 Communication Between SIMATIC S7-1500 and SIMATIC S7-300: Step 7 V16 / Bsend / BRCV9226355166No ratings yet
- Global USS - Inside Sales Account ManagerDocument2 pagesGlobal USS - Inside Sales Account Managerneeraj viharNo ratings yet
- Pro-C751 FSM en Final 220811Document1,598 pagesPro-C751 FSM en Final 220811عاصم الدليميNo ratings yet
- Internship ReportDocument15 pagesInternship Reportharmain khalilNo ratings yet
- 4 Special Fire Hazards and PreventionDocument22 pages4 Special Fire Hazards and Preventiondroffilcz27100% (1)
- Studi Pengaruh Waktu Pembakaran Terhadap Kuat Tekan BataDocument12 pagesStudi Pengaruh Waktu Pembakaran Terhadap Kuat Tekan BataIcha ChairunNo ratings yet
- Poster Thesis PresentationDocument6 pagesPoster Thesis PresentationPedro Craggett100% (1)
- Cessna 208 (Caravan) : Standard De-Ice BootsDocument174 pagesCessna 208 (Caravan) : Standard De-Ice BootsNaguibNo ratings yet