You might also like
- Module 7 Separable and HomogeneousDocument10 pagesModule 7 Separable and HomogeneousAC PAMANo ratings yet
- Laplace Transform Good RevisionDocument20 pagesLaplace Transform Good RevisionraymondushrayNo ratings yet
- NEW FRACTIONAL DERIVATIVES WITH NONLOCAL AND NON-SINGULAR KERNELDocument8 pagesNEW FRACTIONAL DERIVATIVES WITH NONLOCAL AND NON-SINGULAR KERNELArooba IrfanNo ratings yet
- Module 5 Linear EquationsDocument14 pagesModule 5 Linear EquationsAC PAMANo ratings yet
- Module 1 Definition of Laplace TransformDocument11 pagesModule 1 Definition of Laplace TransformAC PAMANo ratings yet
- Numerical Methods For Parabolic ParitialDocument10 pagesNumerical Methods For Parabolic ParitiallazhorNo ratings yet
- 7 13PDocument2 pages7 13PitsmecutyNo ratings yet
- TUSHAR_KANTI_SAHAMechanics-22020-03-28Mechanics-T.K. SAHA-Notes 2Document7 pagesTUSHAR_KANTI_SAHAMechanics-22020-03-28Mechanics-T.K. SAHA-Notes 2Kofi EduseiNo ratings yet
- Laplace TransformDocument28 pagesLaplace TransformSAIKAT GANGULYNo ratings yet
- Taylor Series Method For Solving Linear Fredholm Integral Equation of Second Kind Using MATLABDocument10 pagesTaylor Series Method For Solving Linear Fredholm Integral Equation of Second Kind Using MATLABHari Madhavan Krishna KumarNo ratings yet
- PID Controller Back UpDocument114 pagesPID Controller Back Upluli_pedrosaNo ratings yet
- 2006년_공학미분방정식_공통출제_기말Document9 pages2006년_공학미분방정식_공통출제_기말dlwnstmd705No ratings yet
- 10 Laplace Transforms (Notes)Document18 pages10 Laplace Transforms (Notes)i21020652No ratings yet
- On Hamilton's Principle in Einstein's Theory of GravitationDocument35 pagesOn Hamilton's Principle in Einstein's Theory of GravitationStelioPassarisNo ratings yet
- HW3 2020 SolutionsDocument8 pagesHW3 2020 SolutionsHaroon KhanNo ratings yet
- D.E MTH210Document70 pagesD.E MTH210perfectNjaNo ratings yet
- 9-Probability Density in Relativistic Quantum MechanicsDocument12 pages9-Probability Density in Relativistic Quantum Mechanicssid_senadheeraNo ratings yet
- 1 EMTH301 ODEs Lecture Notes 1Document71 pages1 EMTH301 ODEs Lecture Notes 1Khumo Ezekiel MoraNo ratings yet
- Convergence of Lagrange Hermite On Unit Circle: AbstractDocument9 pagesConvergence of Lagrange Hermite On Unit Circle: AbstractVarunKanaujiaNo ratings yet
- MATH 1851 - Laplace Transforms: (A) Basic ConceptsDocument8 pagesMATH 1851 - Laplace Transforms: (A) Basic ConceptsMuhamad Ghassan JawwadNo ratings yet
- Free Response Part 1Document18 pagesFree Response Part 1AriAdiSaputraNo ratings yet
- Laplace Transform: Mathematica As Laplacetransform (F (T), T, S)Document5 pagesLaplace Transform: Mathematica As Laplacetransform (F (T), T, S)Secret SecretNo ratings yet
- Infinitely Nested RadicalsDocument8 pagesInfinitely Nested Radicals00294enksdfaNo ratings yet
- CH 6.2: Solution of Initial Value Problems: ' Is Related in A Simple WayDocument26 pagesCH 6.2: Solution of Initial Value Problems: ' Is Related in A Simple WaywandileNo ratings yet
- The Method of Integration by Partial FractionsDocument10 pagesThe Method of Integration by Partial FractionsJohn Rofer CabantingNo ratings yet
- Math IaDocument24 pagesMath IaKshiraj PanchalNo ratings yet
- Hamilton SystemDocument4 pagesHamilton SystemmrhflameableNo ratings yet
- Advanced Engineering MathematicsDocument49 pagesAdvanced Engineering MathematicsJMPerezNo ratings yet
- Why The Sum of Everything Is Almost Negative NothingDocument16 pagesWhy The Sum of Everything Is Almost Negative Nothingsccylones100% (1)
- A Remark About Asymptotic Stability in Duffing Equations - Lateral Stability in Comb-Drive Finger MEMSDocument12 pagesA Remark About Asymptotic Stability in Duffing Equations - Lateral Stability in Comb-Drive Finger MEMSDaniel NuñezNo ratings yet
- Electrostatics Manual v1.1Document10 pagesElectrostatics Manual v1.1savvvvvvvvvvyNo ratings yet
- The Laplace Transform FileDocument42 pagesThe Laplace Transform FilegainchoudharyNo ratings yet
- Exact Differential EquationDocument14 pagesExact Differential EquationMuhammad Hamza NisarNo ratings yet
- CH 5 Inverse LTDocument17 pagesCH 5 Inverse LTAkashNo ratings yet
- Einstein's Mistakes in Deriving Special Theory of RelativityDocument13 pagesEinstein's Mistakes in Deriving Special Theory of RelativityLalit VadherNo ratings yet
- LOGARITHMS AND GEOMETRIC SEQUENCESDocument10 pagesLOGARITHMS AND GEOMETRIC SEQUENCESpiyushNo ratings yet
- Linear Differntial EquationDocument13 pagesLinear Differntial EquationMuhammad Hamza NisarNo ratings yet
- Laplace TransformDocument15 pagesLaplace TransformMihai EnacheNo ratings yet
- Rupchand ProjectDocument39 pagesRupchand ProjectSK HASANNo ratings yet
- 5 - Algorithms For Some Classes of PropositionalDocument7 pages5 - Algorithms For Some Classes of PropositionalkunjbhaiNo ratings yet
- Lec# 8 (Higher Order DE)Document22 pagesLec# 8 (Higher Order DE)Faraz KashifNo ratings yet
- Leibniz Integral Rule - WikipediaDocument70 pagesLeibniz Integral Rule - WikipediaMannu Bhattacharya100% (1)
- Free Response Part 2Document23 pagesFree Response Part 2AswinNo ratings yet
- Differential Equations ElsgoltsDocument8 pagesDifferential Equations ElsgoltsAyeshaAmbreenNo ratings yet
- 1st Order ODE (Notes)Document25 pages1st Order ODE (Notes)i21020652No ratings yet
- Bernoulli Differential EquationDocument2 pagesBernoulli Differential EquationIan DalisayNo ratings yet
- Differential EquationsDocument65 pagesDifferential EquationsRayhan BNo ratings yet
- Dr. Firas K. AL-Zuhairi: Ordinary Differential EquationDocument24 pagesDr. Firas K. AL-Zuhairi: Ordinary Differential EquationhusseinNo ratings yet
- LaplaceDocument6 pagesLaplaceAjith Kumar ArumughamNo ratings yet
- Buckling of Simply Supported-Clamped Functionally Graded Material Column: New Closed-Form SolutionsDocument36 pagesBuckling of Simply Supported-Clamped Functionally Graded Material Column: New Closed-Form SolutionsCiprian ComanNo ratings yet
- Fourier FraccionalDocument17 pagesFourier FraccionalDaniel AlejandroNo ratings yet
- Laplace Transformation - WordDocument9 pagesLaplace Transformation - WordlovebeannNo ratings yet
- Rayleigh-Ritz Method ExplainedDocument14 pagesRayleigh-Ritz Method ExplainedIshu GoelNo ratings yet
- Differential Equations - Fundamental Sets of SolutionsDocument3 pagesDifferential Equations - Fundamental Sets of SolutionsEllen Jane GonzalesNo ratings yet
- ME 563 Mechanical Vibrations Lecture #14: Eigenvalue Problem For Continuous SystemsDocument14 pagesME 563 Mechanical Vibrations Lecture #14: Eigenvalue Problem For Continuous SystemsHamad GamalNo ratings yet
- The Laplace TransformDocument34 pagesThe Laplace Transformjkligvk. jukjNo ratings yet
- TUSHAR - KANTI - SAHAMechanics-42020-04-19Mechanics-T.K. SAHA-Notes 4Document7 pagesTUSHAR - KANTI - SAHAMechanics-42020-04-19Mechanics-T.K. SAHA-Notes 4Anik GhoshNo ratings yet
- Differential Equations - Notes: Basic ConceptsDocument7 pagesDifferential Equations - Notes: Basic ConceptslostkinNo ratings yet
- Higher Order Linear EquationsDocument6 pagesHigher Order Linear EquationsJakki KieltyNo ratings yet
- Iteration Methods and Numerical SolutionsDocument19 pagesIteration Methods and Numerical SolutionsAC PAMANo ratings yet
- LECTURE 4c. NUMERICAL APPOXIMATIONDocument24 pagesLECTURE 4c. NUMERICAL APPOXIMATIONAC PAMANo ratings yet
- LECTURE 4d. NUMERICAL APPOXIMATIONDocument12 pagesLECTURE 4d. NUMERICAL APPOXIMATIONAC PAMANo ratings yet
- Module 6 Bernoulli EquationsDocument1 pageModule 6 Bernoulli EquationsAC PAMANo ratings yet
- Plate No. 5 Solve All Unknowns Using Gauss-Jordan MethodDocument1 pagePlate No. 5 Solve All Unknowns Using Gauss-Jordan MethodAC PAMANo ratings yet
- Homework-No.-13 Numerical ApproximationsDocument3 pagesHomework-No.-13 Numerical ApproximationsAC PAMANo ratings yet
- LECTURE 4a. NUMERICAL APPOXIMATIONDocument50 pagesLECTURE 4a. NUMERICAL APPOXIMATIONAC PAMANo ratings yet
- Module 4 Solution of Initial Value Problems: THEOREM 6.2.1Document14 pagesModule 4 Solution of Initial Value Problems: THEOREM 6.2.1AC PAMANo ratings yet
- Module 4 Solution of Initial Value Problems: THEOREM 6.2.1Document14 pagesModule 4 Solution of Initial Value Problems: THEOREM 6.2.1AC PAMANo ratings yet
- C StrucAnalysis Wong Jan17 1Document4 pagesC StrucAnalysis Wong Jan17 1Hattori HanzoNo ratings yet
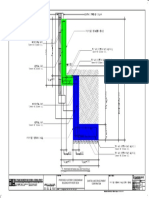
- SLDC RETAINING WALL-Model PDFDocument1 pageSLDC RETAINING WALL-Model PDFAC PAMANo ratings yet
- Properties of Blending FunctionsDocument8 pagesProperties of Blending Functionsayu7kajiNo ratings yet
- Term 1 Chp1 Functions PDFDocument1 pageTerm 1 Chp1 Functions PDFBong Sheng FengNo ratings yet
- 1.1 FunctionsDocument32 pages1.1 FunctionsJadeChristynLeonorNo ratings yet
- Control Systems Time Response AnalysisDocument6 pagesControl Systems Time Response AnalysisAnoop Kumar JairathNo ratings yet
- Membership Functions: "Principles of Soft Computing, 2Document18 pagesMembership Functions: "Principles of Soft Computing, 2جرح الماضيNo ratings yet
- ISA PNID StandardsDocument14 pagesISA PNID StandardsHanif PayandehNo ratings yet
- Genetic AlgorithmDocument32 pagesGenetic AlgorithmNaman TanejaNo ratings yet
- P&ID Diagram Basics: Purpose, Owner & ContentsDocument21 pagesP&ID Diagram Basics: Purpose, Owner & ContentsChristian Breth BurgosNo ratings yet
- Functions EN V5.1 PDFDocument39 pagesFunctions EN V5.1 PDFChris Inrocks100% (1)
- SIMSOLID Technical WhitepaperDocument10 pagesSIMSOLID Technical WhitepaperLeonardo BarbosaNo ratings yet
- Introduction To Programming With MATLABDocument5 pagesIntroduction To Programming With MATLABDanielAeiounAeioumNo ratings yet
- Iomedical Signal ProcessingDocument450 pagesIomedical Signal ProcessingFelipe Dias100% (1)
- Exponential Functions Practice AssignmentDocument10 pagesExponential Functions Practice AssignmentSachin KNo ratings yet
- XII - Holiday H.WDocument5 pagesXII - Holiday H.WRushil SaxenaNo ratings yet
- Genconfig 3 1 0 Global GuideDocument148 pagesGenconfig 3 1 0 Global GuideCcccvNo ratings yet
- Master the Basics of CalculusDocument18 pagesMaster the Basics of CalculusMatthew Christian EspanoNo ratings yet
- Ug LPM Alt MfugDocument133 pagesUg LPM Alt MfugSisuso Sisa SisusoNo ratings yet
- Pro Real Time - ProscreenerDocument36 pagesPro Real Time - Proscreener11727No ratings yet
- B.Tech 3rd SemesterDocument18 pagesB.Tech 3rd SemesterAdityaNo ratings yet
- K To 12 MELC Mathematics JHSDocument12 pagesK To 12 MELC Mathematics JHSV.G. Lopez AspirinNo ratings yet
- Differential FlatnessDocument56 pagesDifferential FlatnessarbitNo ratings yet
- COURSE OUTLINE Calculus UBITDocument2 pagesCOURSE OUTLINE Calculus UBITAlishan ArshadNo ratings yet
- BUSC2112 Basic Calculus First Quarter ExamDocument137 pagesBUSC2112 Basic Calculus First Quarter ExamShanley delos angeles100% (3)
- Learning Materials in MathematicsDocument17 pagesLearning Materials in MathematicsMykel T FajardoNo ratings yet
- ASM0404 Tutorial 6 Functions Relations Limits ContinuityDocument6 pagesASM0404 Tutorial 6 Functions Relations Limits ContinuityhadassahhadidNo ratings yet
- Kroes-Technical Artefacts Creations of Mind and MatterDocument210 pagesKroes-Technical Artefacts Creations of Mind and MattermonomonNo ratings yet
- TwinCAT IEC61131-3Document176 pagesTwinCAT IEC61131-3Nigo VillanNo ratings yet
- An Introduction To Set Theory and Topology PDFDocument459 pagesAn Introduction To Set Theory and Topology PDFHelio RamosNo ratings yet
- LeatherwoodCh 8 Lab 1Document5 pagesLeatherwoodCh 8 Lab 1Christy100% (1)
- Research Papers Mathematical ModellingDocument8 pagesResearch Papers Mathematical Modellingefe8zf19100% (1)