You might also like
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response CriteriaDEVI RAJENDRANNo ratings yet
- Activiti in Action: Executable business processes in BPMN 2.0From EverandActiviti in Action: Executable business processes in BPMN 2.0No ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- Managing Software Deliverables: A Software Development Management MethodologyFrom EverandManaging Software Deliverables: A Software Development Management MethodologyNo ratings yet
- DatasheetDocument3 pagesDatasheetDaniel Orlando Carballo FernándezNo ratings yet
- High-Definition CRT Display Horizontal Deflection Output ApplicationsDocument4 pagesHigh-Definition CRT Display Horizontal Deflection Output ApplicationsArie DinataNo ratings yet
- Engineering and Commercial Functions in BusinessFrom EverandEngineering and Commercial Functions in BusinessRating: 5 out of 5 stars5/5 (1)
- 400V/7A Switching Regulator Applications: Package Dimensions FeaturesDocument4 pages400V/7A Switching Regulator Applications: Package Dimensions FeaturesMaikol DominguezNo ratings yet
- 2 SC 5297Document4 pages2 SC 5297carlosNo ratings yet
- Ultrahigh-Definition CRT Display Horizontal Deflection Output ApplicationsDocument4 pagesUltrahigh-Definition CRT Display Horizontal Deflection Output ApplicationsGabriel RacovskyNo ratings yet
- 01 VillaDocument16 pages01 VillaFabio OliveiraNo ratings yet
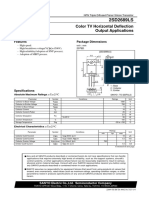
- Color TV Horizontal Deflection Output ApplicationsDocument3 pagesColor TV Horizontal Deflection Output ApplicationsJose M PeresNo ratings yet
- TFT LCD Module 0.96 Inch 80RGB 160DOTS MODULE NUMBER: N096-1608TBBIG09-C08 Revision: ADocument13 pagesTFT LCD Module 0.96 Inch 80RGB 160DOTS MODULE NUMBER: N096-1608TBBIG09-C08 Revision: AsytaryNo ratings yet
- Template Estimation WBS v0.1Document11 pagesTemplate Estimation WBS v0.1FGW HN Trương Văn Đạt100% (1)
- 2SD 2580 - SanyoDocument4 pages2SD 2580 - SanyoStevenNo ratings yet
- High-power transistor for CRT displaysDocument4 pagesHigh-power transistor for CRT displaysFernando ViloriaNo ratings yet
- 2SC4429 PDFDocument5 pages2SC4429 PDFban4444No ratings yet
- 2SA1011/2SC2344: High-Voltage Switching, AF Power Amp, 100W Output Predriver ApplicationsDocument2 pages2SA1011/2SC2344: High-Voltage Switching, AF Power Amp, 100W Output Predriver ApplicationsGabriel GaniNo ratings yet
- TT2138LS SanyoSemiconDeviceDocument4 pagesTT2138LS SanyoSemiconDevicewilson de jesus miranda noreñaNo ratings yet
- Integrated 1D-Multid Fluid Dynamic Models For The Simulation of I.C.E. Intake and Exhaust SystemsDocument5 pagesIntegrated 1D-Multid Fluid Dynamic Models For The Simulation of I.C.E. Intake and Exhaust SystemsdidNo ratings yet
- Unit 2 Performance Evaluations: Structure NosDocument18 pagesUnit 2 Performance Evaluations: Structure Nosatul srivastavaNo ratings yet
- 2X Operation Manual Full 6217Document87 pages2X Operation Manual Full 6217oli MaguireNo ratings yet
- CMA-MarkingPlan - AU 2017Document2 pagesCMA-MarkingPlan - AU 2017ShehrozSTNo ratings yet
- Errors in Measurement LectureDocument9 pagesErrors in Measurement LectureMarishan RohitNo ratings yet
- High-Voltage Switching Applications: Package Dimensions FeaturesDocument5 pagesHigh-Voltage Switching Applications: Package Dimensions Featuresabdkrim31No ratings yet
- C 5388Document4 pagesC 5388Rex DelaPenaNo ratings yet
- BW Manual (28 - 11 - 2017)Document27 pagesBW Manual (28 - 11 - 2017)0109vishupatilNo ratings yet
- Tunneling ProductivityDocument56 pagesTunneling ProductivitySiddharth Patel100% (1)
- An 000 Battery Percentage V1.3Document11 pagesAn 000 Battery Percentage V1.3ernesto.domoticaNo ratings yet
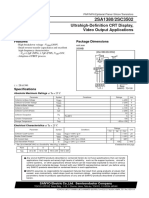
- 2SA1380/2SC3502: Ultrahigh-Definition CRT Display, Video Output ApplicationsDocument5 pages2SA1380/2SC3502: Ultrahigh-Definition CRT Display, Video Output ApplicationsdulocoNo ratings yet
- Betriebsanleitung Kolbenspeicheranlage EnglischDocument35 pagesBetriebsanleitung Kolbenspeicheranlage EnglischJozmel Blancas CamarenaNo ratings yet
- CHG002334667 - Adapting JDA Interfaces To Transporeon - ImplementationDocument3 pagesCHG002334667 - Adapting JDA Interfaces To Transporeon - ImplementationcathyNo ratings yet
- Tranzistor 2sc4106Document4 pagesTranzistor 2sc4106BrunoNo ratings yet
- Color TV Horizontal Deflection Output ApplicationsDocument3 pagesColor TV Horizontal Deflection Output ApplicationsLuisSniperNo ratings yet
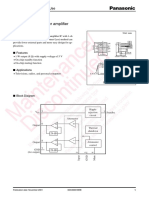
- An7511 PDFDocument10 pagesAn7511 PDFVenancio GutierrezNo ratings yet
- 2 SD 1887Document3 pages2 SD 1887MiguelZaragozaNo ratings yet
- Definer 220 Manual RevFDocument19 pagesDefiner 220 Manual RevFCarmen Elena ZapataNo ratings yet
- Project 4 C++Document2 pagesProject 4 C++Jahangir AssaNo ratings yet
- 2 SD 1883Document3 pages2 SD 1883MiguelZaragozaNo ratings yet
- E10 Numerical Display System Operation ManualDocument28 pagesE10 Numerical Display System Operation ManualThiago Teixeira PiresNo ratings yet
- CWI Developers Guide - WEB SERVICE MITELDocument57 pagesCWI Developers Guide - WEB SERVICE MITELChristophe KoclanakisNo ratings yet
- Apple II Applesoft BASIC Programmer's Reference Manual - Volume 1Document236 pagesApple II Applesoft BASIC Programmer's Reference Manual - Volume 1remow100% (1)
- NPN Triple Diffused Planar Silicon Transistor DatasheetDocument5 pagesNPN Triple Diffused Planar Silicon Transistor DatasheetJeysonGarzonNo ratings yet
- Golf Renewal - Postmortem ReportDocument15 pagesGolf Renewal - Postmortem ReportPhuong LeNo ratings yet
- Mg33mi02Document228 pagesMg33mi02Mehtab AhmedNo ratings yet
- Color TV Horizontal Deflection Output ApplicationsDocument4 pagesColor TV Horizontal Deflection Output ApplicationsJose M PeresNo ratings yet
- Ultrahigh-Speed Switching Applications: Package Dimensions FeaturesDocument4 pagesUltrahigh-Speed Switching Applications: Package Dimensions FeaturesDewi 89No ratings yet
- At1 - ExcavadoraDocument14 pagesAt1 - ExcavadoraFREDDY NICOLAS ESCOBEDO LOZANONo ratings yet
- Ultrahigh-Definition CRT Display Horizontal Deflection Output ApplicationsDocument3 pagesUltrahigh-Definition CRT Display Horizontal Deflection Output ApplicationsPhilip EgyNo ratings yet
- Technical Analysis 1 (TA1) Visual Inspection For Wheel LoadersDocument18 pagesTechnical Analysis 1 (TA1) Visual Inspection For Wheel Loadershidekel crafort vinicioNo ratings yet
- TT2170LS: Color TV Horizontal Deflection Output ApplicationsDocument4 pagesTT2170LS: Color TV Horizontal Deflection Output Applicationsmardia nkNo ratings yet
- High-Friquency General-Purpose Amplifier Applications: Package Dimensions FeaturesDocument5 pagesHigh-Friquency General-Purpose Amplifier Applications: Package Dimensions FeaturesArturo ArmuellesNo ratings yet
- PRO1 08E Digital OperationsDocument29 pagesPRO1 08E Digital OperationsLộc QuangNo ratings yet
- Okadia - Knowledge Brief Pm#04Document34 pagesOkadia - Knowledge Brief Pm#04Maurel ADJEINo ratings yet
- ID551 BaggingPAC TechManual enDocument27 pagesID551 BaggingPAC TechManual enIrfan AqibNo ratings yet
- Advanced Ch.03 Management AccountingDocument113 pagesAdvanced Ch.03 Management AccountingJayden Shipman100% (2)
- Project Rules & Guidelines for Tan Thang Cement PlantDocument26 pagesProject Rules & Guidelines for Tan Thang Cement PlantgacongnghiepNo ratings yet
- 2SC4634Document3 pages2SC4634Sam AkoNo ratings yet
- 1 Problem and ObjectiveDocument3 pages1 Problem and ObjectivefaranimohamedNo ratings yet
- Theory and Instrumentation of GC IntroductionDocument24 pagesTheory and Instrumentation of GC IntroductionChuongNo ratings yet
- 1 Problem and ObjectiveDocument3 pages1 Problem and ObjectivefaranimohamedNo ratings yet
- Mixer 1 Report DP2 Stage 1Document9 pagesMixer 1 Report DP2 Stage 1faranimohamedNo ratings yet
- As SummarizeDocument1 pageAs SummarizefaranimohamedNo ratings yet
- Types of Corrosion Explained in DetailDocument14 pagesTypes of Corrosion Explained in DetailfaranimohamedNo ratings yet
- WWT Mini Project Report - Group 4Document14 pagesWWT Mini Project Report - Group 4faranimohamedNo ratings yet
- Bhopal TragedyDocument10 pagesBhopal TragedyfaranimohamedNo ratings yet
- Unit Op Lab Example PDFDocument96 pagesUnit Op Lab Example PDFyuyuNo ratings yet
- Islamic VS Roman Catholic ArchitectureDocument6 pagesIslamic VS Roman Catholic ArchitecturefaranimohamedNo ratings yet
- Chap 1.0 Fundamental of Engineering EconomicsDocument68 pagesChap 1.0 Fundamental of Engineering EconomicsfaranimohamedNo ratings yet
- CONCLUSION - Docx PetrochemDocument2 pagesCONCLUSION - Docx PetrochemfaranimohamedNo ratings yet
- Operate Solid Liquid Extraction Experiment Using Solid Liquid Extraction UnitDocument1 pageOperate Solid Liquid Extraction Experiment Using Solid Liquid Extraction UnitfaranimohamedNo ratings yet
- DISCUSSION - Docx PCDocument5 pagesDISCUSSION - Docx PCfaranimohamedNo ratings yet
- DISCUSSION - Docx ReactorDocument6 pagesDISCUSSION - Docx ReactorfaranimohamedNo ratings yet
- Basic Process Description For Production of BenzeneDocument1 pageBasic Process Description For Production of BenzenefaranimohamedNo ratings yet
- Manual Calculation For Reactors and SeparatorsDocument4 pagesManual Calculation For Reactors and SeparatorsfaranimohamedNo ratings yet
- Enterpreneurship Jan 2015Document8 pagesEnterpreneurship Jan 2015faranimohamedNo ratings yet
- Assignment 1Document14 pagesAssignment 1faranimohamedNo ratings yet
- Guerbet Process Hydroformylation Fermentation Reactants Reaction Type ReactionsDocument2 pagesGuerbet Process Hydroformylation Fermentation Reactants Reaction Type ReactionsfaranimohamedNo ratings yet
- Basic Product Description For Production of BenzeneDocument1 pageBasic Product Description For Production of BenzenefaranimohamedNo ratings yet
- Reactor Design: P K 9247.597 ExpDocument5 pagesReactor Design: P K 9247.597 ExpfaranimohamedNo ratings yet
- Petrochem Result DiscussionDocument3 pagesPetrochem Result DiscussionfaranimohamedNo ratings yet
- AssignmentDocument6 pagesAssignmentfaranimohamedNo ratings yet
- Topic 3 3Document54 pagesTopic 3 3faranimohamedNo ratings yet
- Topic 4 3Document25 pagesTopic 4 3faranimohamedNo ratings yet
- Assignment 1 PDFDocument14 pagesAssignment 1 PDFfaranimohamedNo ratings yet
- TimelineDocument9 pagesTimelinefaranimohamedNo ratings yet
- UHS1021Document30 pagesUHS1021faranimohamedNo ratings yet
- Lecture01 PushkarDocument27 pagesLecture01 PushkarabcdNo ratings yet
- Rolls-Royce M250 FIRST Network: 2015 Customer Support DirectoryDocument76 pagesRolls-Royce M250 FIRST Network: 2015 Customer Support Directoryale11vigarNo ratings yet
- RIBA Outline Plan of Work ExplainedDocument20 pagesRIBA Outline Plan of Work ExplainedkenNo ratings yet
- Lecture Euler EquationDocument33 pagesLecture Euler EquationYash RajNo ratings yet
- Tutorial Task 3 - A C P I WK 2Document8 pagesTutorial Task 3 - A C P I WK 2BM70621 Alya Zahirah Binti AziziNo ratings yet
- Teaching Vocabulary Through TPR Method ToDocument41 pagesTeaching Vocabulary Through TPR Method ToAan Safwandi100% (3)
- Sunera Best Practices For Remediating SoDsDocument7 pagesSunera Best Practices For Remediating SoDssura anil reddyNo ratings yet
- Unit 7 Noun ClauseDocument101 pagesUnit 7 Noun ClauseMs. Yvonne Campbell0% (1)
- Chapter 20: HealthDocument42 pagesChapter 20: HealthMajid KarimiNo ratings yet
- Danbury BrochureDocument24 pagesDanbury BrochureQuique MartinNo ratings yet
- Basketball 2011: Johnson CountyDocument25 pagesBasketball 2011: Johnson CountyctrnewsNo ratings yet
- Sand Compaction MethodDocument124 pagesSand Compaction Methodisaych33ze100% (1)
- Chemical ReactionDocument13 pagesChemical ReactionSujit LawareNo ratings yet
- Sem Iii Sybcom Finacc Mang AccDocument6 pagesSem Iii Sybcom Finacc Mang AccKishori KumariNo ratings yet
- Hotel Engineering Facilities: A Case Study of Maintenance PerformanceDocument7 pagesHotel Engineering Facilities: A Case Study of Maintenance PerformanceHoh Pui KeiNo ratings yet
- Qcs 2010 Section 13 Part 3 Accessories PDFDocument3 pagesQcs 2010 Section 13 Part 3 Accessories PDFbryanpastor106No ratings yet
- Annual Report 18Document363 pagesAnnual Report 18Safeer UllahNo ratings yet
- Su1 Assessment U01Document14 pagesSu1 Assessment U01Cristian Seas ArceNo ratings yet
- 1.1 Enterprise AssessmentDocument1 page1.1 Enterprise AssessmentGermanRobertoFongNo ratings yet
- Twingo 3 & Clio 4Document10 pagesTwingo 3 & Clio 4Alexandre Le GrandNo ratings yet
- SocorexDocument6 pagesSocorexTedosNo ratings yet
- Board Question Paper: March 2018: Geography and EconomicsDocument2 pagesBoard Question Paper: March 2018: Geography and EconomicsVishvajit PatilNo ratings yet
- DataSheet IMA18-10BE1ZC0K 6041793 enDocument8 pagesDataSheet IMA18-10BE1ZC0K 6041793 enRuben Hernandez TrejoNo ratings yet
- Samsung RAM Product Guide Feb 11Document24 pagesSamsung RAM Product Guide Feb 11Javed KhanNo ratings yet
- Adms OneAdms One ClassDocument9 pagesAdms OneAdms One ClasssafwatNo ratings yet
- Introduction to Globalization ExplainedDocument27 pagesIntroduction to Globalization ExplainedMichael Ron DimaanoNo ratings yet
- AP Standard Data All PDFDocument963 pagesAP Standard Data All PDFSiva Kumar100% (1)
- European Journal of Internal MedicineDocument4 pagesEuropean Journal of Internal Medicinesamer battatNo ratings yet
- From Memphis To KingstonDocument19 pagesFrom Memphis To KingstonCarlos QuirogaNo ratings yet
- Rock Support Optimization in Himalayan TunnelsDocument7 pagesRock Support Optimization in Himalayan TunnelsHarold TaylorNo ratings yet