You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Es ZG621 Revised HandoutDocument12 pagesEs ZG621 Revised Handoutkansal611No ratings yet
- ISA Transactions: A. Asgharnia, A. Jamali, R. Shahnazi, A. MaheriDocument15 pagesISA Transactions: A. Asgharnia, A. Jamali, R. Shahnazi, A. MaheriJuan MataNo ratings yet
- Improved Performance of A PV Solar Panel With Adaptive Neuro Fuzzy Inference System ANFIS Based MPPTDocument4 pagesImproved Performance of A PV Solar Panel With Adaptive Neuro Fuzzy Inference System ANFIS Based MPPTJuan MataNo ratings yet
- Application of Particle Swarm Optimization in The Design of Halbach Permanent Magnet Synchronous Generators For Megawatt Level Wind TurbinesDocument4 pagesApplication of Particle Swarm Optimization in The Design of Halbach Permanent Magnet Synchronous Generators For Megawatt Level Wind TurbinesJuan MataNo ratings yet
- Improving Renewable Energy Forecasting With A Grid of Numerical Weather PredictionsDocument10 pagesImproving Renewable Energy Forecasting With A Grid of Numerical Weather PredictionsJuan MataNo ratings yet
- Geochain Slim Service Manual v1 9. 4 (NAM) With Drawings PDFDocument76 pagesGeochain Slim Service Manual v1 9. 4 (NAM) With Drawings PDFGary TubridyNo ratings yet
- How To Design and Calculate Solar Street Light System - PDFDocument9 pagesHow To Design and Calculate Solar Street Light System - PDFRalday100% (2)
- Distortion in AmplifiersDocument6 pagesDistortion in AmplifiersvikasNo ratings yet
- Digital and Analog SignalsDocument2 pagesDigital and Analog SignalsMEHEDI HASANNo ratings yet
- SAV 876 02 enDocument1 pageSAV 876 02 enJocelyn VaccaniNo ratings yet
- Din Rail Mount: Seriesone DR SeriesDocument7 pagesDin Rail Mount: Seriesone DR SeriesMortis BeansNo ratings yet
- MMBT5551: 160V NPN Small Signal Transistor in Sot23Document6 pagesMMBT5551: 160V NPN Small Signal Transistor in Sot23حسین مشعلNo ratings yet
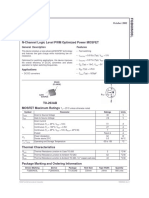
- FQB60N03L: N-Channel Logic Level PWM Optimized Power MOSFETDocument11 pagesFQB60N03L: N-Channel Logic Level PWM Optimized Power MOSFETbelga cemNo ratings yet
- K200 and FIL 2 Errors. Case No. DC119429Document62 pagesK200 and FIL 2 Errors. Case No. DC119429Mikal SmithNo ratings yet
- MFP PCB v1 SchematicsDocument1 pageMFP PCB v1 SchematicsFernandoFerP.RNo ratings yet
- KX-TD1232 Installation Manual NewDocument168 pagesKX-TD1232 Installation Manual NewCharlie ChannelsNo ratings yet
- Scarlett 2i2 Studio 2nd Gen User Guide v1.1 English - enDocument19 pagesScarlett 2i2 Studio 2nd Gen User Guide v1.1 English - enKeetykatNo ratings yet
- Universal 7-Part Data Circuit - Google SearchDocument2 pagesUniversal 7-Part Data Circuit - Google Searchxoxoxoxox11No ratings yet
- AD-10-100-400-F1P1: LED Intelligent DriverDocument1 pageAD-10-100-400-F1P1: LED Intelligent DriverAgus YohanesNo ratings yet
- Transmission Line Theory Katherine Deleg Cristhian Guerrero Sebastian Guerrero Fabricio Malla Diego NarvaezDocument114 pagesTransmission Line Theory Katherine Deleg Cristhian Guerrero Sebastian Guerrero Fabricio Malla Diego NarvaezAndres FloresNo ratings yet
- Report of Standing Committee of Experts On Failure of 220 KV & Above Voltage Class Substation Equipment (April 2019 - December 2021)Document211 pagesReport of Standing Committee of Experts On Failure of 220 KV & Above Voltage Class Substation Equipment (April 2019 - December 2021)satyaprasadkolliNo ratings yet
- Synchronizing Control and Monitoring SystemDocument9 pagesSynchronizing Control and Monitoring SystemKhalid MazharNo ratings yet
- Eco User Manual: SmartDocument44 pagesEco User Manual: Smartlucas ronaldo coronel mendozaNo ratings yet
- EE352L Experiment N# 1 Objectives: 1.1 Pre-LabDocument3 pagesEE352L Experiment N# 1 Objectives: 1.1 Pre-LabYassine DjillaliNo ratings yet
- CS-1 Question Bank 2022Document11 pagesCS-1 Question Bank 2022KushagraNo ratings yet
- Manual Medion TV RemoteDocument25 pagesManual Medion TV RemoteVTraining centerNo ratings yet
- Hd-Rx-4Kz-101-1G: DM Lite® 4K60 4:4:4 Receiver For Hdmi® Signal Extension Over Catx Cable, Wall PlateDocument5 pagesHd-Rx-4Kz-101-1G: DM Lite® 4K60 4:4:4 Receiver For Hdmi® Signal Extension Over Catx Cable, Wall PlateJover GencianosNo ratings yet
- Smart Bus Management System IJERTCONV6IS08022Document4 pagesSmart Bus Management System IJERTCONV6IS08022Wirba DesmondNo ratings yet
- Iso1176 PDFDocument39 pagesIso1176 PDFshekoofe danaNo ratings yet
- Media & Information Literacy 4Document4 pagesMedia & Information Literacy 4Kristine Joy DefanteNo ratings yet
- 27C1024 - EpromDocument20 pages27C1024 - EpromSavo BacicNo ratings yet
- Manual Instrucciones TX Nivel Ultrasonico FMU40-42-43 - FFDocument36 pagesManual Instrucciones TX Nivel Ultrasonico FMU40-42-43 - FFHeiner PalaciosNo ratings yet
- Panasonic KX T7665Document8 pagesPanasonic KX T7665mp3mp40% (1)
- Cummins: Fault Code: 442 PID: P168 SPN: 168 FMI: 0Document3 pagesCummins: Fault Code: 442 PID: P168 SPN: 168 FMI: 0Enrrique LaraNo ratings yet