You might also like
- PERFORMANCE Pace X - Rig 1500 HP CASTILLA AND RUBIALES FIELDDocument18 pagesPERFORMANCE Pace X - Rig 1500 HP CASTILLA AND RUBIALES FIELDCanrig RamdeNo ratings yet
- Auvsi Suas 2019 Journals Yildiz Technical UniversityDocument15 pagesAuvsi Suas 2019 Journals Yildiz Technical UniversityZEBO AKPARALIEVANo ratings yet
- calceSARA PDFDocument77 pagescalceSARA PDFRajesh ChanduNo ratings yet
- AMRDEC Facilities 2008Document42 pagesAMRDEC Facilities 2008Jim HowlandNo ratings yet
- Scitech20-Program Final PDFDocument214 pagesScitech20-Program Final PDFPaulNo ratings yet
- Very Affordable Precision ProjectileDocument19 pagesVery Affordable Precision ProjectileАлександар НуждићNo ratings yet
- Active Control For Blended Wing Body Aircraft - 2011Document18 pagesActive Control For Blended Wing Body Aircraft - 2011Maurizio BernasconiNo ratings yet
- ADSBIMPP03Document30 pagesADSBIMPP03manjitkamalNo ratings yet
- Viraf BrochureDocument4 pagesViraf BrochureAntriksha VishwakarmaNo ratings yet
- Generalized Automatic and Augmented Manual Flight Control: Berlin Technical University Colloquium May 19, 2006Document73 pagesGeneralized Automatic and Augmented Manual Flight Control: Berlin Technical University Colloquium May 19, 2006Erick LeonardoNo ratings yet
- Session 5 - Aircraft Design Process - InternshipDocument14 pagesSession 5 - Aircraft Design Process - InternshipQasim ElectricwalaNo ratings yet
- Aeronautical Development Establishment (ADE) (DRDO Institute)Document9 pagesAeronautical Development Establishment (ADE) (DRDO Institute)LuptongaNo ratings yet
- Indra-Monopulse Secondary Surveillance Mode S RadarDocument6 pagesIndra-Monopulse Secondary Surveillance Mode S RadarDame Artha MarbunNo ratings yet
- Day 2 Workshop 1 Airworthiness Otmar Leitner - Camcopter S-100Document14 pagesDay 2 Workshop 1 Airworthiness Otmar Leitner - Camcopter S-100Bala RajuNo ratings yet
- Miniature UAV Radar SystemDocument24 pagesMiniature UAV Radar SystemszmonNo ratings yet
- Motor & GeneratorsDocument50 pagesMotor & GeneratorsSanthosh KumarNo ratings yet
- Criterion Directional Guidance System Slide Sheet BrochureDocument2 pagesCriterion Directional Guidance System Slide Sheet BrochuretxcrudeNo ratings yet
- 2. Flight Inspection with Drone (2022) - 최승원Document34 pages2. Flight Inspection with Drone (2022) - 최승원Undral BatbayarNo ratings yet
- Hand Luanch UAV WWW - rahaUAVDocument107 pagesHand Luanch UAV WWW - rahaUAVTarik Hassan ElsonniNo ratings yet
- Proposal For Master Thesis - 16-11Document16 pagesProposal For Master Thesis - 16-11Ahmed MansourNo ratings yet
- Airplane Balance Airplane Balance: Goals For DesignDocument17 pagesAirplane Balance Airplane Balance: Goals For DesignNishanth LNo ratings yet
- The Advanced Flight Deck For The Dornier Seastar: AerospaceDocument4 pagesThe Advanced Flight Deck For The Dornier Seastar: AerospaceShawyoo LeeNo ratings yet
- Robotpilóta Rendszerek: Budapesti Műszaki EgyetemDocument78 pagesRobotpilóta Rendszerek: Budapesti Műszaki EgyetemNaguibNo ratings yet
- CFDProcessDocument13 pagesCFDProcessSahil KumarNo ratings yet
- Era ADS-B System Operation Training: Richard XieDocument29 pagesEra ADS-B System Operation Training: Richard Xiemuhammad arif sulaimanNo ratings yet
- 1409 Adm6 02dat Aircft Ee R13Document4 pages1409 Adm6 02dat Aircft Ee R13PrashanthNo ratings yet
- Aircraft Design ProcessDocument40 pagesAircraft Design ProcessIvan GluhenkiyNo ratings yet
- Module 2 - Hull and Superstructure ModellingDocument8 pagesModule 2 - Hull and Superstructure ModellingMuhamad Afroh FuadiNo ratings yet
- Electric Aircraft PrototypingDocument18 pagesElectric Aircraft Prototypingcontact.diae.bouchikiNo ratings yet
- Navcad: The Scope of N C Is Enormous, and Should Be A Required Acquisition of All Design Offices..Document2 pagesNavcad: The Scope of N C Is Enormous, and Should Be A Required Acquisition of All Design Offices..JoseNo ratings yet
- Hydrodynamic Autopilot Design of An AUVDocument5 pagesHydrodynamic Autopilot Design of An AUVSuman SahaNo ratings yet
- Performance and Multi-Disciplinary Design of Contra-Rotating Open RotorsDocument22 pagesPerformance and Multi-Disciplinary Design of Contra-Rotating Open RotorsГригорий ОмельченкоNo ratings yet
- Nav Cad 2007 Demo GuideDocument21 pagesNav Cad 2007 Demo GuideMohd NyxamNo ratings yet
- RF Design ProcessDocument5 pagesRF Design ProcessyogeshhotchandaniNo ratings yet
- U.S. Army Research, Development and Engineering Command: Autonomy For Next Generation VTOL SystemsDocument16 pagesU.S. Army Research, Development and Engineering Command: Autonomy For Next Generation VTOL SystemsOliver RailaNo ratings yet
- PBS CRAY RiserSim US WEBDocument4 pagesPBS CRAY RiserSim US WEBkamsNo ratings yet
- Week4-5-6 Conceptual Design ARO2011L-2021Document103 pagesWeek4-5-6 Conceptual Design ARO2011L-2021Samy OusmanNo ratings yet
- Integrating CFD and Experiment: The Jaguar Land Rover Aeroacoustics ProcessDocument19 pagesIntegrating CFD and Experiment: The Jaguar Land Rover Aeroacoustics Processmamillapalli sri harshaNo ratings yet
- VishalYadav (0 0)Document1 pageVishalYadav (0 0)Ronnit ShuklaNo ratings yet
- Crs CombatDocument4 pagesCrs CombatFatih OzcanNo ratings yet
- PFD ND Display EfisDocument4 pagesPFD ND Display EfisagungNo ratings yet
- Aircraft Brochure Bombardier Global8000 Factsheet - ENDocument2 pagesAircraft Brochure Bombardier Global8000 Factsheet - ENANDREA DELPILAR ALONSO CRUZNo ratings yet
- Naval Radar NXDocument4 pagesNaval Radar NXQasim JummaniNo ratings yet
- UMTS Performance KPI and Resource Capacity Training: Security LevelDocument46 pagesUMTS Performance KPI and Resource Capacity Training: Security LevelIyesusgetanewNo ratings yet
- Pri Air Des 01Document43 pagesPri Air Des 01sara MartinezNo ratings yet
- Dynamic Simulation For FLNG OperationDocument24 pagesDynamic Simulation For FLNG OperationKong LingweiNo ratings yet
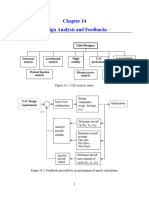
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
- USNavy NAVAIR THREAT/TARGET SYSTEMS VanSplinterDocument41 pagesUSNavy NAVAIR THREAT/TARGET SYSTEMS VanSplinterAraduF89No ratings yet
- Brochure Mk5 Naval Radar DisplayDocument2 pagesBrochure Mk5 Naval Radar DisplayAfdhal Kamarulzaman100% (1)
- Current & Future Trends in RoboticsDocument32 pagesCurrent & Future Trends in Roboticsbooks sanNo ratings yet
- 08 Kerali HDM4 Calibration 08Document21 pages08 Kerali HDM4 Calibration 08jhocapeNo ratings yet
- UAV Course SyllabusDocument3 pagesUAV Course SyllabusKumar kumarapuNo ratings yet
- 2 Ce 4Document29 pages2 Ce 4Sankalp AgrawalNo ratings yet
- Grandnew: See Further. Go AnywhereDocument5 pagesGrandnew: See Further. Go AnywhereLavern P. SipinNo ratings yet
- Professional Experience: Company Brief Description On ProjectsDocument7 pagesProfessional Experience: Company Brief Description On ProjectsSharath BhavanasiNo ratings yet
- Robert Allan - Escort Tug StabilityDocument28 pagesRobert Allan - Escort Tug Stabilitycarlos ivan carvajal ortiz100% (1)
- Sistema de Acceso de Operador ADS RCSDocument240 pagesSistema de Acceso de Operador ADS RCSMarcoNo ratings yet
- 1 Mission & Foundations: HardwareDocument7 pages1 Mission & Foundations: Hardwareabhijeet7362No ratings yet
- Wichip: Technical Aspects: Dr. Vu-Duc NgoDocument34 pagesWichip: Technical Aspects: Dr. Vu-Duc NgoQuyền PhạmNo ratings yet
- Lowres RCS Pit Viper Brochure - tcm835-3271875Document12 pagesLowres RCS Pit Viper Brochure - tcm835-3271875rigoberto otiniano100% (1)
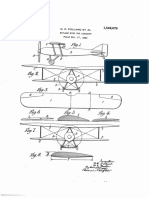
- H. P. Folland Et All: Biplane Wing For AircraftDocument3 pagesH. P. Folland Et All: Biplane Wing For AircraftAbdul Rashid TajarNo ratings yet
- Incorporating Handling Qualities Analysis Into Rotorcraft Conceptual DesignDocument23 pagesIncorporating Handling Qualities Analysis Into Rotorcraft Conceptual DesignAbdul Rashid TajarNo ratings yet
- A Pilot's Assessment of Helicopter Handling-Quality Factors Common To Both Agility and Instrument Flying TasksDocument21 pagesA Pilot's Assessment of Helicopter Handling-Quality Factors Common To Both Agility and Instrument Flying TasksAbdul Rashid TajarNo ratings yet
- Developing Modified ADS-33D Helicopter Maneuvers For The Shipboar PDFDocument62 pagesDeveloping Modified ADS-33D Helicopter Maneuvers For The Shipboar PDFAbdul Rashid TajarNo ratings yet
- 1984 9648 Jatm 8 3 0289 PDFDocument18 pages1984 9648 Jatm 8 3 0289 PDFAbdul Rashid TajarNo ratings yet
- A Rotorcraft Conceptual Design Tool For Handling Qualities EvaluationDocument10 pagesA Rotorcraft Conceptual Design Tool For Handling Qualities EvaluationAbdul Rashid TajarNo ratings yet
- 5 NASA Ames John HinesDocument19 pages5 NASA Ames John HinesswetavagNo ratings yet
- NASA Spearhead To SpaceDocument20 pagesNASA Spearhead To SpaceBob AndrepontNo ratings yet
- NASA: 109459main 05 02astrogram CDocument16 pagesNASA: 109459main 05 02astrogram CNASAdocumentsNo ratings yet
- From The Chief Historian Simulated Shuttle Day (1985) : in This IssueDocument24 pagesFrom The Chief Historian Simulated Shuttle Day (1985) : in This IssueBilly BlattNo ratings yet
- Caldwell App CompleteDocument31 pagesCaldwell App CompleteSandeep PrasadNo ratings yet
- Airships 101Document57 pagesAirships 101Jim CognitoNo ratings yet
- Aerodynamics of Hang GliderDocument108 pagesAerodynamics of Hang GlideralexealmeidaNo ratings yet
- Spin Off 2019Document186 pagesSpin Off 2019Himanshu Shukla100% (1)
- NASA Simulation HelicopterDocument52 pagesNASA Simulation HelicopterDavid Jiménez MenaNo ratings yet
- NASA: 80005main 32699astrogramDocument8 pagesNASA: 80005main 32699astrogramNASAdocumentsNo ratings yet
- Adventures in Research A History of Ames Research Center 1940-1965Document570 pagesAdventures in Research A History of Ames Research Center 1940-1965Bob AndrepontNo ratings yet
- (Mark Wolverton) The Depths of Space The Story of (B-Ok - Xyz) PDFDocument266 pages(Mark Wolverton) The Depths of Space The Story of (B-Ok - Xyz) PDFFüleki EszterNo ratings yet
- Ah 56 Cheyenne RotorDocument55 pagesAh 56 Cheyenne Rotoroscar lopezNo ratings yet
- NewSpace 2011 ProgramDocument52 pagesNewSpace 2011 ProgramSpace Frontier FoundationNo ratings yet
- NASA: Astrogram 2005 07Document14 pagesNASA: Astrogram 2005 07NASAdocumentsNo ratings yet
- Chapman 1979Document21 pagesChapman 1979fionn.leavyNo ratings yet
- 2006249454Document20 pages2006249454sh_nk2010No ratings yet
- San Mateo Daily Journal 03-12-19 EditionDocument28 pagesSan Mateo Daily Journal 03-12-19 EditionSan Mateo Daily JournalNo ratings yet
- UH-60 Blackhawk NASA TestsDocument18 pagesUH-60 Blackhawk NASA TestsmaverickF15No ratings yet
- NewSpace 2009 ProgramDocument46 pagesNewSpace 2009 ProgramSpace Frontier Foundation100% (2)
- NASA ReportDocument10 pagesNASA ReportRyan LoweNo ratings yet
- History - Road Map of EventsDocument20 pagesHistory - Road Map of Eventsadarohit100% (1)
- Space Resources Space Settlements: NASA SP-428Document300 pagesSpace Resources Space Settlements: NASA SP-428ugauravNo ratings yet
- Superstars of Modern AeronauticsDocument10 pagesSuperstars of Modern AeronauticswexlerNo ratings yet
- Nasa: 01-077Document2 pagesNasa: 01-077NASAdocumentsNo ratings yet
- NASA 167988main 07 01astrogramDocument10 pagesNASA 167988main 07 01astrogramNASAdocuments100% (1)
- Wind Tunnels of NASADocument273 pagesWind Tunnels of NASAdaoodilyasNo ratings yet
- NASA 174566main 07 04astrogramDocument12 pagesNASA 174566main 07 04astrogramNASAdocumentsNo ratings yet