You might also like
- Sun, J. 2012. Hull Form DesignDocument10 pagesSun, J. 2012. Hull Form DesignManuel Esteban MercadoNo ratings yet
- Ship Resistance Performance Optimization Design Based On CAD CFDDocument5 pagesShip Resistance Performance Optimization Design Based On CAD CFDTat-Hien LeNo ratings yet
- Predicting Ship Hydrodynamic Performance in Today WorldDocument8 pagesPredicting Ship Hydrodynamic Performance in Today WorldTat-Hien LeNo ratings yet
- Comparative Analysis Results of Towing Tank and Numerical Calculations With Harvald Guldammer MethodDocument10 pagesComparative Analysis Results of Towing Tank and Numerical Calculations With Harvald Guldammer MethodTat-Hien LeNo ratings yet
- Evaluation of Added Resistance of KVLCC2 in Short WavesDocument14 pagesEvaluation of Added Resistance of KVLCC2 in Short WavesTat-Hien LeNo ratings yet
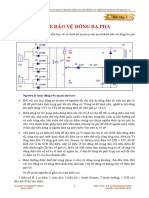
- Rôle Baûo Veä Doøng Ba Pha: Nguyeân Lyù Hoaït Ñoäng Cuûa Maïch Nhö SauDocument25 pagesRôle Baûo Veä Doøng Ba Pha: Nguyeân Lyù Hoaït Ñoäng Cuûa Maïch Nhö SauTat-Hien LeNo ratings yet
- Ñieàu Chænh Toác Ñoä Ñoäng Cô DCDocument19 pagesÑieàu Chænh Toác Ñoä Ñoäng Cô DCTat-Hien LeNo ratings yet
- Improving The Accuracy of Ship Resistance Prediction Using Computational Fluid Dynamics ToolDocument7 pagesImproving The Accuracy of Ship Resistance Prediction Using Computational Fluid Dynamics ToolTat-Hien LeNo ratings yet
- Estimation of Patrol Gunboat's Hull ResistanceDocument6 pagesEstimation of Patrol Gunboat's Hull ResistancebrufpotNo ratings yet
- PengYon Nov2012 8233Document156 pagesPengYon Nov2012 8233Tat-Hien LeNo ratings yet
- XFlow BrochureDocument6 pagesXFlow BrochureThanakorn VichiensamuthNo ratings yet
- A Hybrid Solver Based On Efficient BEM-potential and LBM-NS Models Recent LBM Developments and Applications To Naval HydrodynamicsDocument8 pagesA Hybrid Solver Based On Efficient BEM-potential and LBM-NS Models Recent LBM Developments and Applications To Naval HydrodynamicsTat-Hien LeNo ratings yet
- Numerical Study On A KVLCC2 Model Advancing in Shallow WaterDocument10 pagesNumerical Study On A KVLCC2 Model Advancing in Shallow WaterTat-Hien LeNo ratings yet
- A Numerical and Experimental Study of Resistance, Trim and Sinkage of An Inland Ship Model in Extremely Shallow WatereDocument8 pagesA Numerical and Experimental Study of Resistance, Trim and Sinkage of An Inland Ship Model in Extremely Shallow WatereTat-Hien LeNo ratings yet
- DDES OfWetted and Cavitating Marine Propeller For CHA Underwater Noise AssessmentDocument26 pagesDDES OfWetted and Cavitating Marine Propeller For CHA Underwater Noise AssessmentTat-Hien LeNo ratings yet
- Optimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingDocument9 pagesOptimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingTat-Hien LeNo ratings yet
- Prediction - Wave-Making - Resistance - Fast - Ships - Shallow - Restricted - WatersDocument22 pagesPrediction - Wave-Making - Resistance - Fast - Ships - Shallow - Restricted - WatersNaufal Luthfi100% (1)
- Prediction of Shallow Water Resistance For A New Ship Model Using CFD Simulation Case Study Container BargeDocument10 pagesPrediction of Shallow Water Resistance For A New Ship Model Using CFD Simulation Case Study Container BargeTat-Hien LeNo ratings yet
- Combi Freighter 3850Document2 pagesCombi Freighter 3850Tat-Hien LeNo ratings yet
- Dimensional Constraints in Ship DesignDocument6 pagesDimensional Constraints in Ship DesignTat-Hien LeNo ratings yet
- Design and Performance Analysis of B Series Propeller For Traditional Purse Seine Boat in The North Coastal Region of Central Java IndonesiaDocument9 pagesDesign and Performance Analysis of B Series Propeller For Traditional Purse Seine Boat in The North Coastal Region of Central Java IndonesiaTat-Hien LeNo ratings yet
- Investigation of Effective Wake Scaling For Unconventional Propellers PDFDocument73 pagesInvestigation of Effective Wake Scaling For Unconventional Propellers PDFTat-Hien LeNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Shortcuts For Ellipses and HyperBolaDocument3 pagesShortcuts For Ellipses and HyperBolaChristian Simon D. SOLINAPNo ratings yet
- Summative Test Gr7Document1 pageSummative Test Gr7Les Angelz100% (1)
- S1&2-Basic Electrical Engineering: MGU B.TECH SyllabusDocument1 pageS1&2-Basic Electrical Engineering: MGU B.TECH SyllabusshonmlrNo ratings yet
- Applications of 8086Document38 pagesApplications of 8086Ajay PeterNo ratings yet
- Chapter 9 EnglishDocument53 pagesChapter 9 Englishhoda melhemNo ratings yet
- Kindergarten-DLL Week 1 (June 3-7, 2019)Document7 pagesKindergarten-DLL Week 1 (June 3-7, 2019)Ma. Cristina DumallagNo ratings yet
- Chapter 3 Soil Mechanics Part IIDocument34 pagesChapter 3 Soil Mechanics Part IImmNo ratings yet
- DRG ch4Document33 pagesDRG ch4Muhammad Ashiqur Rahaman NoorNo ratings yet
- For And: Viterbi Decoding Satellite Space CommunicationDocument14 pagesFor And: Viterbi Decoding Satellite Space CommunicationRosi Marleny Machuca rojasNo ratings yet
- Game of SultansDocument268 pagesGame of Sultansmnz gmz100% (1)
- Machine Design-II Question BankDocument9 pagesMachine Design-II Question BankProf. Avinash MahaleNo ratings yet
- Nbme Usmle Score TableDocument1 pageNbme Usmle Score TableThara Foreste-Magloire70% (10)
- Molten Salt Heat Storage PDFDocument20 pagesMolten Salt Heat Storage PDFchuckhsu1248No ratings yet
- Secure Remote Services Installation Guide PDFDocument70 pagesSecure Remote Services Installation Guide PDFDavid GiriNo ratings yet
- Choking vs. Clutch Performance: A Study of Sport Performance Under PressureDocument19 pagesChoking vs. Clutch Performance: A Study of Sport Performance Under Pressuremensrea0No ratings yet
- ALL-CIVIL ENGINEERING - S3 - 2019-Scheme-Syllabus - Ktu StuDocument67 pagesALL-CIVIL ENGINEERING - S3 - 2019-Scheme-Syllabus - Ktu StuMeghaNo ratings yet
- Lab ReportDocument4 pagesLab ReportSyafiq MTNo ratings yet
- Introduction To Fission and FusionDocument19 pagesIntroduction To Fission and FusionZubair Hassan100% (1)
- Actuarial Science Program at The University of ConnecticutDocument9 pagesActuarial Science Program at The University of ConnecticutRohit VenkatNo ratings yet
- MODULE 0 CPE105 Review On StatisticsDocument12 pagesMODULE 0 CPE105 Review On StatisticsKishiane Ysabelle L. CabaticNo ratings yet
- Pharmaceutical AnalysisDocument18 pagesPharmaceutical Analysisak gamingNo ratings yet
- 0 - Actions On Structures Wind Loads - CIB ReportDocument100 pages0 - Actions On Structures Wind Loads - CIB ReportWilliam PolNo ratings yet
- 01 - Enhancing Power Density in SMPS With MasterganDocument44 pages01 - Enhancing Power Density in SMPS With MasterganNWorKNo ratings yet
- X L W C: Motor Shaft CapacitiveDocument14 pagesX L W C: Motor Shaft CapacitiveMuhammad Fauzan Ansari Bin AzizNo ratings yet
- The Best Itext Questions On StackoverflowDocument361 pagesThe Best Itext Questions On Stackoverflowadaf8850% (2)
- AC 23-8B Flight Test Guide App 1Document22 pagesAC 23-8B Flight Test Guide App 1Ladislao PazmanyNo ratings yet
- IOS Developer - ExperiencedDocument37 pagesIOS Developer - Experiencedswornavidhya.mahadevanNo ratings yet
- Activities InterventionDocument2 pagesActivities InterventionDonabel Villasaya CariosNo ratings yet
- Final PPT of Carbon NanotubesDocument29 pagesFinal PPT of Carbon Nanotubesmkumar_5481450% (2)