You might also like
- PV Water Pumping With A Peak-Power Tracker Using A Simple Six-Step Square-Wave InverterDocument8 pagesPV Water Pumping With A Peak-Power Tracker Using A Simple Six-Step Square-Wave InverterrcmscribdNo ratings yet
- Deriving Inertial Response From A Non-Inertial PV System For Frequency RegulationDocument5 pagesDeriving Inertial Response From A Non-Inertial PV System For Frequency RegulationGustavoAndresEscobarParedesNo ratings yet
- Design and Simulation of A PV System With Battery Storage Using Bidirectional DC DC Converter Using Matlab Simulink PDFDocument8 pagesDesign and Simulation of A PV System With Battery Storage Using Bidirectional DC DC Converter Using Matlab Simulink PDFDobrea Marius-AlexandruNo ratings yet
- Design and Performance Analysis of A Photovoltaic WaterDocument8 pagesDesign and Performance Analysis of A Photovoltaic WaterPrakash Kumar RayNo ratings yet
- Journal of Electrical Engineering & Technology (JEET) : ©iaemeDocument6 pagesJournal of Electrical Engineering & Technology (JEET) : ©iaemeIAEME PublicationNo ratings yet
- Maximum Power Point Tracking Control of PV System For DC Motors Drive With Neural NetworkDocument6 pagesMaximum Power Point Tracking Control of PV System For DC Motors Drive With Neural NetworkHackbartNo ratings yet
- Solar Water Pumping System With Improved Efficiency and Less MaintenanceDocument5 pagesSolar Water Pumping System With Improved Efficiency and Less MaintenancepvickyNo ratings yet
- Solar PVDocument8 pagesSolar PVmurthy237No ratings yet
- IJRAR1ACP025Document7 pagesIJRAR1ACP025Vignesh U PNo ratings yet
- Flyback Inverter Controlled by Sensorless Current MPPT For Photovoltaic Power SystemDocument8 pagesFlyback Inverter Controlled by Sensorless Current MPPT For Photovoltaic Power SystemAaqib Ahmad QureshiNo ratings yet
- Design of Standalone PV System: Dheeban S S, Muthu Selvan N B, Senthil Kumar CDocument5 pagesDesign of Standalone PV System: Dheeban S S, Muthu Selvan N B, Senthil Kumar CElea JackNo ratings yet
- IJRET20160520002Document5 pagesIJRET20160520002Pooja AshishNo ratings yet
- Modeling and Simulation of A GRID-TIED Solar PV System: K.Sakthivel, V.Jayalakshmi, G.RajakumariDocument7 pagesModeling and Simulation of A GRID-TIED Solar PV System: K.Sakthivel, V.Jayalakshmi, G.RajakumariChairul AkbarNo ratings yet
- Simulation of Non-Isolated Bidirectional DC - DC Converter For Battery Charging and Discharging of PV Battery Stand Alone System Supplying DC LoadDocument12 pagesSimulation of Non-Isolated Bidirectional DC - DC Converter For Battery Charging and Discharging of PV Battery Stand Alone System Supplying DC LoadGaurav PranamiNo ratings yet
- A Novel Method of Frequency Regulation in MicrogridDocument11 pagesA Novel Method of Frequency Regulation in MicrogridAayesha AhmedNo ratings yet
- 1 s2.0 S0142061518338122 Main PDFDocument12 pages1 s2.0 S0142061518338122 Main PDFAmit sahaNo ratings yet
- Solar Water Pumping System Modelling and Analysis Using MATLAB/SimulinkDocument6 pagesSolar Water Pumping System Modelling and Analysis Using MATLAB/SimulinkASHWAN DASARINo ratings yet
- PV Based Water Pumping System For Agricultural SectorDocument7 pagesPV Based Water Pumping System For Agricultural SectorInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- B11150782S719 PDFDocument5 pagesB11150782S719 PDFAISHWARYA BANERJEENo ratings yet
- Energy Conversion and Management: Z. Zhou, P.M. Holland, P. IgicDocument10 pagesEnergy Conversion and Management: Z. Zhou, P.M. Holland, P. IgicjulioNo ratings yet
- Reduced Switches Count of Five Level H-Bridge Inverter With Integrated Boost Converter in Solar PV SystemDocument12 pagesReduced Switches Count of Five Level H-Bridge Inverter With Integrated Boost Converter in Solar PV SystemIJRASETPublicationsNo ratings yet
- Optim 2014 BanuDocument6 pagesOptim 2014 BanuIoan-Viorel BanuNo ratings yet
- Solar Energy Conversion Systemwith Maximum Power Point TrackingDocument7 pagesSolar Energy Conversion Systemwith Maximum Power Point Trackingshahid.msee187No ratings yet
- SEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTDocument6 pagesSEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTWARSE JournalsNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument8 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Iccicct - 507 PDFDocument5 pagesIccicct - 507 PDFGlan DevadhasNo ratings yet
- Final Paper R-2022Document11 pagesFinal Paper R-2022Hafedh AbidNo ratings yet
- Design and Simulation of A Grid Tied Single PhaseDocument10 pagesDesign and Simulation of A Grid Tied Single PhaseERICK SANTIAGO ACOSTA HERNANDEZNo ratings yet
- An Efficient Constant Current Controller For PV Solar Power Generator Integrated With The GridDocument6 pagesAn Efficient Constant Current Controller For PV Solar Power Generator Integrated With The GridsunilkumareceNo ratings yet
- MPPT AlgorithmDocument7 pagesMPPT AlgorithmVishnu Kumar NadarNo ratings yet
- Performance Analysis of VSI Based Standalone PV Generation System Connected To Induction MotorDocument1 pagePerformance Analysis of VSI Based Standalone PV Generation System Connected To Induction Motorashwani yadavNo ratings yet
- A Study On Maximum Power Point Tracking Techniques For Photovoltaic SystemsDocument8 pagesA Study On Maximum Power Point Tracking Techniques For Photovoltaic SystemserpublicationNo ratings yet
- MPPT For Standalone PV Systems With The Help of SEPIC ConverterDocument9 pagesMPPT For Standalone PV Systems With The Help of SEPIC ConverterIJRASETPublicationsNo ratings yet
- 2013c - Sliding Mode Control Based Power Balancing For Grid ConnectedDocument6 pages2013c - Sliding Mode Control Based Power Balancing For Grid ConnectedP. K. SahuNo ratings yet
- A Seven Level Inverter Using A Solar Power Generation SystemDocument7 pagesA Seven Level Inverter Using A Solar Power Generation Systemsasitharan33No ratings yet
- Modeling and Simulation of PV Array With Boost Converter: An Open Loop StudyDocument56 pagesModeling and Simulation of PV Array With Boost Converter: An Open Loop StudyDeva RajNo ratings yet
- SSRN Id4238828Document6 pagesSSRN Id4238828Ain KaloiNo ratings yet
- Improved Single Stage Grid Connected Solar PV System Using Multilevel InverterDocument6 pagesImproved Single Stage Grid Connected Solar PV System Using Multilevel InverterFaruq FaruqNo ratings yet
- 1 A New Modified MPPT Controller For Solar Photovolaic SystemDocument6 pages1 A New Modified MPPT Controller For Solar Photovolaic SystemalgNo ratings yet
- Ieee Paper FormatDocument6 pagesIeee Paper FormatJabir SijasNo ratings yet
- ELDADocument4 pagesELDAarurizaNo ratings yet
- Modelling and Control of Standalone Solar Photovoltaic Charging SystemDocument4 pagesModelling and Control of Standalone Solar Photovoltaic Charging SystemJakfar GimanNo ratings yet
- A New Hybrid Photovoltaic-Diesel System Control Scheme For An Isolated LoadDocument12 pagesA New Hybrid Photovoltaic-Diesel System Control Scheme For An Isolated LoadHichem HamdiNo ratings yet
- Ijird, 50Document24 pagesIjird, 50oke temitope oluwasanmiNo ratings yet
- IJEAS0208028Document6 pagesIJEAS0208028erpublicationNo ratings yet
- Thakran 2018Document4 pagesThakran 2018ShubhamNo ratings yet
- Powereng13 Turkey Beriber 2Document7 pagesPowereng13 Turkey Beriber 2Ahmed ShoeebNo ratings yet
- PV Module PerformanceDocument3 pagesPV Module PerformanceJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Research and Design of Inverter Applied in Solar PV Systems Connected To Distribution GridDocument11 pagesResearch and Design of Inverter Applied in Solar PV Systems Connected To Distribution GridJohn AdewaleNo ratings yet
- An Integrated Control Algorithm For A Single-Stage PV Pumping System Using An Open-End Winding Induction MotorDocument10 pagesAn Integrated Control Algorithm For A Single-Stage PV Pumping System Using An Open-End Winding Induction MotorHashim KhanNo ratings yet
- Comparative Study of Three MPPT Algorithms For A Photovoltaic System ControlDocument6 pagesComparative Study of Three MPPT Algorithms For A Photovoltaic System ControlZahra Ait-hssaineNo ratings yet
- A Comparative Analysis of ANN Algorithms Performance For Maximum Power Point Tracking in Solar Photovoltaic SystemDocument11 pagesA Comparative Analysis of ANN Algorithms Performance For Maximum Power Point Tracking in Solar Photovoltaic SystemIJRASETPublicationsNo ratings yet
- RP Report New FourDocument9 pagesRP Report New FourElectrio MurmuNo ratings yet
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingFrom EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Grid-Integrated and Standalone Photovoltaic Distributed Generation Systems: Analysis, Design, and ControlFrom EverandGrid-Integrated and Standalone Photovoltaic Distributed Generation Systems: Analysis, Design, and ControlNo ratings yet
- Online Shopping Factors That Affect Consumer Purchasing BehaviourDocument16 pagesOnline Shopping Factors That Affect Consumer Purchasing BehaviourAhmad MqdadNo ratings yet
- COVID-19 - Impact On Consumer Behavior Trends - AccentureDocument11 pagesCOVID-19 - Impact On Consumer Behavior Trends - AccentureAhmad MqdadNo ratings yet
- COVID-19 Has Changed Consumer Behavior. What Does It Mean For The Future - University of Arizona NewsDocument5 pagesCOVID-19 Has Changed Consumer Behavior. What Does It Mean For The Future - University of Arizona NewsAhmad MqdadNo ratings yet
- Conceptual FrameworkDocument11 pagesConceptual FrameworkMac John PierreNo ratings yet
- COVID 19 Restrictions and Consumers Psychological Reactance Toward Offline Shopping Freedom RestorationDocument24 pagesCOVID 19 Restrictions and Consumers Psychological Reactance Toward Offline Shopping Freedom RestorationAhmad MqdadNo ratings yet
- Impact of COVID-19 On Consumer Behaviour: Manitoba AnalyticsDocument3 pagesImpact of COVID-19 On Consumer Behaviour: Manitoba AnalyticsAhmad MqdadNo ratings yet
- How COVID-19-is-changing-consumer-behaviornow-and-foreverDocument6 pagesHow COVID-19-is-changing-consumer-behaviornow-and-forevermesay83No ratings yet
- Creating Your First SSIS Project: 1. Start Business Intelligence Development StudioDocument10 pagesCreating Your First SSIS Project: 1. Start Business Intelligence Development StudioAhmad MqdadNo ratings yet
- 01 McKinsey & Company July 7 2020Document19 pages01 McKinsey & Company July 7 2020Gladwin Joseph100% (1)
- Impact of The COVID-19 Pandemic On Online Consumer Purchasing BehaviorDocument19 pagesImpact of The COVID-19 Pandemic On Online Consumer Purchasing BehaviorBình BìnhNo ratings yet
- Change of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsDocument15 pagesChange of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsAhmad MqdadNo ratings yet
- UNIT III Case Study 1Document4 pagesUNIT III Case Study 1Ahmad MqdadNo ratings yet
- Adventures of Sherlock Holmes, by A. Conan DoyleDocument194 pagesAdventures of Sherlock Holmes, by A. Conan DoyleAhmad MqdadNo ratings yet
- Change of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsDocument15 pagesChange of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsAhmad MqdadNo ratings yet
- Change of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsDocument15 pagesChange of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsAhmad MqdadNo ratings yet
- Change of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsDocument15 pagesChange of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsAhmad MqdadNo ratings yet
- ERD FinalDocument1 pageERD FinalAhmad MqdadNo ratings yet
- Change of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsDocument15 pagesChange of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsAhmad MqdadNo ratings yet
- Questionnaire About The Pressure To Hire Family Members in The Family Business ResultesDocument13 pagesQuestionnaire About The Pressure To Hire Family Members in The Family Business ResultesAhmad MqdadNo ratings yet
- The Rover Boys in BusinessDocument163 pagesThe Rover Boys in BusinessAhmad MqdadNo ratings yet
- HS2031 Individual Assignment T1 2021 HarshvardhanDocument8 pagesHS2031 Individual Assignment T1 2021 HarshvardhanAhmad MqdadNo ratings yet
- Impact of The COVID-19 Pandemic On Online Consumer Purchasing BehaviorDocument19 pagesImpact of The COVID-19 Pandemic On Online Consumer Purchasing BehaviorBình BìnhNo ratings yet
- AhitofelAmir - Ahitofel - Amir - SQL at Main Amircohen87 - AhitofelAmir GitHubDocument25 pagesAhitofelAmir - Ahitofel - Amir - SQL at Main Amircohen87 - AhitofelAmir GitHubAhmad MqdadNo ratings yet
- Business Essentials: Entrepreneurship, New Ventures, and Business OwnershipDocument45 pagesBusiness Essentials: Entrepreneurship, New Ventures, and Business OwnershipAhmad MqdadNo ratings yet
- Business Essentials: Understanding Business Ethics and Social ResponsibilityDocument42 pagesBusiness Essentials: Understanding Business Ethics and Social ResponsibilityDee IsmailNo ratings yet
- Chapter 3 - Summary Business Essentials Chapter 3 - Summary Business EssentialsDocument8 pagesChapter 3 - Summary Business Essentials Chapter 3 - Summary Business EssentialsAhmad MqdadNo ratings yet
- HS2031 Individual Assignment T1 2021 HarshvardhanDocument8 pagesHS2031 Individual Assignment T1 2021 HarshvardhanAhmad MqdadNo ratings yet
- Change of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsDocument15 pagesChange of Consumption Behaviours in The Pandemic of COVID-19: Examining Residents' Consumption Expenditure and Driving DeterminantsAhmad MqdadNo ratings yet
- Chapter 2 - Summary Business Essentials Chapter 2 - Summary Business EssentialsDocument11 pagesChapter 2 - Summary Business Essentials Chapter 2 - Summary Business EssentialsAhmad MqdadNo ratings yet
- Business Essentials: Marketing Processes and Consumer BehaviorDocument49 pagesBusiness Essentials: Marketing Processes and Consumer BehaviorAhmad MqdadNo ratings yet
- 16olorunfemietal2021 OlayinkaDocument35 pages16olorunfemietal2021 OlayinkaAjibade FaroukNo ratings yet
- 3 Hnov 2018Document20 pages3 Hnov 2018linuxuser userNo ratings yet
- System1 Plots - Machinery-Diagnostic - Part1Document16 pagesSystem1 Plots - Machinery-Diagnostic - Part1Thyagaraju PalisettyNo ratings yet
- Renasys™ Ez Plus: Smith&nephewDocument21 pagesRenasys™ Ez Plus: Smith&nephewBlanca Haydée Mesías Inostroza100% (1)
- Chemistry Project Topics Class 12Document11 pagesChemistry Project Topics Class 12Mari MuthuNo ratings yet
- Ch. 1 Electric Charges and Fields NCERT & PYQsDocument96 pagesCh. 1 Electric Charges and Fields NCERT & PYQsLakshya Jain100% (1)
- 2009 Book PDFDocument256 pages2009 Book PDFfazli.samarNo ratings yet
- 10-Port Antenna: 5961470PG, 5961470PDDocument7 pages10-Port Antenna: 5961470PG, 5961470PDSilviuSNo ratings yet
- Ferromagnetism Alla IsingDocument34 pagesFerromagnetism Alla IsingKoustav MukherjeeNo ratings yet
- Design of Flanges Tongue Groove TypeDocument19 pagesDesign of Flanges Tongue Groove TypeJunaid MateenNo ratings yet
- Molecular Orbital Diagram For B, C, N, O, F and NeDocument12 pagesMolecular Orbital Diagram For B, C, N, O, F and NeGods ArmyNo ratings yet
- 08 Chapter 16 Acid BaseDocument148 pages08 Chapter 16 Acid BaseDamla Nur GÜLNo ratings yet
- 158-M5 Manual Addendum Rev 3Document5 pages158-M5 Manual Addendum Rev 3Matthew StublerNo ratings yet
- Rotary Actuators, NAMUR Interface VDI - VDE 3845 & ISO 5211 (ATEX Certified) Series ARPDocument8 pagesRotary Actuators, NAMUR Interface VDI - VDE 3845 & ISO 5211 (ATEX Certified) Series ARPJhonata CavalcanteNo ratings yet
- Bucket Elevator Calculation Rev 1Document8 pagesBucket Elevator Calculation Rev 1Irfan AhmedNo ratings yet
- 1 - Manuale Va Rev6 - EngDocument22 pages1 - Manuale Va Rev6 - EngИлья МихеевNo ratings yet
- F3 Phyc PP3 QSDocument8 pagesF3 Phyc PP3 QSFrancis MwangangiNo ratings yet
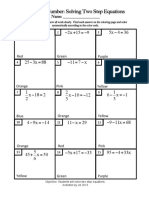
- Two-Step Color by Number ExtractedDocument2 pagesTwo-Step Color by Number ExtractedNica Joy HernandezNo ratings yet
- Yongnuo 560 EX II Flash User ManualDocument1 pageYongnuo 560 EX II Flash User ManualEj CoombsNo ratings yet
- NIT Rourkela ME SyllabusDocument9 pagesNIT Rourkela ME SyllabusVisionateNo ratings yet
- Introduction To Fluid Mechanics and Properties of FluidsDocument27 pagesIntroduction To Fluid Mechanics and Properties of FluidsAyumi QuiomNo ratings yet
- Solutions - Maths Workbook - 2 - Complex NumbersDocument101 pagesSolutions - Maths Workbook - 2 - Complex NumbersravimcanitNo ratings yet
- Effect On Superhydrophobic Surfaces On ElectricalDocument12 pagesEffect On Superhydrophobic Surfaces On Electricalhadi ebrahimfathNo ratings yet
- ING - John Eliot - Models of Psychological Space - Psychometric, Developmental, and Experimental Approaches-Springer-Verlag New York (1987) PDFDocument210 pagesING - John Eliot - Models of Psychological Space - Psychometric, Developmental, and Experimental Approaches-Springer-Verlag New York (1987) PDFSofia CardosoNo ratings yet
- 3va9988-0ba22-SHUNT TRIPDocument4 pages3va9988-0ba22-SHUNT TRIPLeonardo CAMARGO CAMARGONo ratings yet
- Parts of A TransformerDocument3 pagesParts of A TransformerCoreen ElizaldeNo ratings yet
- SepaDocument4 pagesSepaRobert DelfinNo ratings yet
- Low Vibration Track SystemDocument24 pagesLow Vibration Track Systemapa apaapaNo ratings yet
- Tugas BHS Inggris Explanation TextDocument4 pagesTugas BHS Inggris Explanation TextAnisyaf7No ratings yet
- Suction-Specific Speed:: Questions and Answers About Pumping's Least Understood MeasureDocument5 pagesSuction-Specific Speed:: Questions and Answers About Pumping's Least Understood MeasureLuis Joel Ramos RamosNo ratings yet