You might also like
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Power Flow StudyDocument71 pagesPower Flow StudynumansaeedpkNo ratings yet
- II - PowerPoint Slides To Chapter 01 IntroductionDocument17 pagesII - PowerPoint Slides To Chapter 01 IntroductionVishesh Dhillon100% (2)
- Chapter 7 Lecture PowerPointDocument33 pagesChapter 7 Lecture PowerPointkyrwel100% (1)
- Swpe06 en Pss e Iec 60909 Fault Calculations s4Document2 pagesSwpe06 en Pss e Iec 60909 Fault Calculations s4Fitz Gerald Vidal100% (1)
- Transformer voltage regulation and efficiencyDocument15 pagesTransformer voltage regulation and efficiencyJhiGz Llausas de GuzmanNo ratings yet
- PSS Tutorial Chapter Accelerating Power R2Document10 pagesPSS Tutorial Chapter Accelerating Power R2shuaibyesNo ratings yet
- J. B. Ward - Equivalent Circuits For Power Flow StudiesDocument10 pagesJ. B. Ward - Equivalent Circuits For Power Flow StudiesfarhanhosseiniNo ratings yet
- High Voltage EngineeringDocument54 pagesHigh Voltage EngineeringJakeNo ratings yet
- Shunt CompensatorsDocument9 pagesShunt CompensatorsAR-T100% (3)
- Study of Power System Security in Indian Utility 62 Bus SystemDocument10 pagesStudy of Power System Security in Indian Utility 62 Bus SystempjNo ratings yet
- Contingency Analysis of Power Systems PDFDocument4 pagesContingency Analysis of Power Systems PDFbenitogaldos19gmail.comNo ratings yet
- Newton Raphson MethodDocument30 pagesNewton Raphson MethodDinesh Kumar100% (1)
- Monitoring and Control of Power SystemsDocument18 pagesMonitoring and Control of Power Systemsvishal100% (1)
- Power System Security: Viren B. PandyaDocument23 pagesPower System Security: Viren B. PandyavirenpandyaNo ratings yet
- Power Flow AnalysisDocument140 pagesPower Flow Analysisdbharanidharan3334100% (1)
- PSS Lab Exp Edited PDFDocument122 pagesPSS Lab Exp Edited PDFKeith BoltonNo ratings yet
- On FACTSDocument33 pagesOn FACTSAravind Babu100% (1)
- Lowering The Limits For Earth-Fault Detection: Abstract-Current Flowing To Earth Has Only TwoDocument5 pagesLowering The Limits For Earth-Fault Detection: Abstract-Current Flowing To Earth Has Only TwoDeepak GehlotNo ratings yet
- PSCAD Fault Level Calculations Lab ReportDocument13 pagesPSCAD Fault Level Calculations Lab ReportdivanteNo ratings yet
- Interconnected SystemDocument17 pagesInterconnected SystemChowdhury, A HasibNo ratings yet
- Control of HVDC Transmission System Based On MMCDocument22 pagesControl of HVDC Transmission System Based On MMCAnand Parakkat ParambilNo ratings yet
- EE6603-Power System Operation and ControlDocument23 pagesEE6603-Power System Operation and ControlJegan8586100% (1)
- Short-Circuit Current CalculationDocument38 pagesShort-Circuit Current CalculationElectro Tractrix100% (1)
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- Power Flow Analysis For Radial Distribution System Using BackwardForward Sweep MethodDocument5 pagesPower Flow Analysis For Radial Distribution System Using BackwardForward Sweep MethodFerry OpilOpNo ratings yet
- Power System Protection Presentation Dated 03-10-2013 Integrated Protection ControlDocument89 pagesPower System Protection Presentation Dated 03-10-2013 Integrated Protection ControlNagarajan GanesanNo ratings yet
- Parallel Con - For TransformersDocument6 pagesParallel Con - For Transformersmahmoud shalabiNo ratings yet
- Over Voltage ProtectionDocument15 pagesOver Voltage ProtectionSridharan MNo ratings yet
- Chapter OneDocument28 pagesChapter Oneadisu100% (2)
- Power System Operation and Control NotesDocument61 pagesPower System Operation and Control Notesanon_613151744100% (1)
- Power System Protection AssignmentDocument26 pagesPower System Protection AssignmentMohsin AhsanNo ratings yet
- Nine-Bus System: 1 General DescriptionDocument10 pagesNine-Bus System: 1 General DescriptionJoseLuisPerezNo ratings yet
- Study of Relay Protection Modeling and SimulationDocument5 pagesStudy of Relay Protection Modeling and SimulationИван ИвановNo ratings yet
- Transient Stability Improvement of Power System Using UpfcDocument18 pagesTransient Stability Improvement of Power System Using UpfcMuhammadWaqarNo ratings yet
- Detailed Modeling of CIGRÉ HVDC BenchmarkDocument18 pagesDetailed Modeling of CIGRÉ HVDC Benchmarkpeloduro1010No ratings yet
- Calculation - Method - ULF Unbalanced Load Flow ETAP PDFDocument8 pagesCalculation - Method - ULF Unbalanced Load Flow ETAP PDFZulqibalNo ratings yet
- Power System Reliability, Security and State Estimation NotesDocument14 pagesPower System Reliability, Security and State Estimation NotespriyaNo ratings yet
- Optimal SVC Placement for Voltage Improvement and Loss ReductionDocument10 pagesOptimal SVC Placement for Voltage Improvement and Loss Reductionkubera uNo ratings yet
- M.E.Electrical Power System - 2 PDFDocument32 pagesM.E.Electrical Power System - 2 PDFAnonymous 9VcxlFErfNo ratings yet
- What Is Ferranti EffectDocument3 pagesWhat Is Ferranti Effectboopelectra50% (2)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Improvement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodDocument5 pagesImprovement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodRavishankar KankaleNo ratings yet
- Admittance Matrix ExplainedDocument17 pagesAdmittance Matrix Explainedআশিক পালোয়ানNo ratings yet
- Computer Aided Power System Analysis - Assignment IDocument2 pagesComputer Aided Power System Analysis - Assignment IJoel JoseNo ratings yet
- A PAPER On Flexible AC Transmission SystemDocument19 pagesA PAPER On Flexible AC Transmission SystemTeju NookalaNo ratings yet
- Power System Dynamics and ControlDocument2 pagesPower System Dynamics and ControlSudip MondalNo ratings yet
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerDocument78 pagesTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuNo ratings yet
- Harmonic Resonance During Energizing Primary Restorative Transmission SystemsDocument14 pagesHarmonic Resonance During Energizing Primary Restorative Transmission SystemsLuKas21cNo ratings yet
- Load Flow AnalysisDocument12 pagesLoad Flow AnalysisHendra Dwi RamadhanNo ratings yet
- IEEE Power System Paper-Overview of STATCOM TechnologiesDocument6 pagesIEEE Power System Paper-Overview of STATCOM TechnologiesAnoop MathewNo ratings yet
- Component of HVDC Transmission NetworkDocument5 pagesComponent of HVDC Transmission NetworkIqbalilah RamdaniNo ratings yet
- Load Flow and Contingency Analysis in Power SystemsDocument66 pagesLoad Flow and Contingency Analysis in Power Systemsmirsuhail22No ratings yet
- 03 - Power System Analysis FunctionsDocument168 pages03 - Power System Analysis FunctionsgjanitoNo ratings yet
- Static Var Compensators: by Prof. C. RadhakrishnaDocument30 pagesStatic Var Compensators: by Prof. C. RadhakrishnaathbeljoeNo ratings yet
- DISCUSSION Load Flow AnalysisDocument4 pagesDISCUSSION Load Flow AnalysisKu WhereNo ratings yet
- CAPSDocument4 pagesCAPSPratik RanjanNo ratings yet
- Calculation of Thermal Equivalent Short-Time CurrentDocument12 pagesCalculation of Thermal Equivalent Short-Time CurrentAnonymous yD6Qpiq3No ratings yet
- 3 Phase Short Circuit CalculationDocument7 pages3 Phase Short Circuit Calculationcherif yahyaouiNo ratings yet
- Calculation of Thermal Equivalent Short-Time CurrentDocument12 pagesCalculation of Thermal Equivalent Short-Time CurrentAnonymous yD6Qpiq3No ratings yet
- Network Loss Study in PowerFactoryDocument4 pagesNetwork Loss Study in PowerFactoryAnonymous yD6Qpiq3No ratings yet
- Paper STATCOM PDFDocument10 pagesPaper STATCOM PDFAnonymous yD6Qpiq3No ratings yet
- The Switched Capacitor Resistor: Electronic Circuit Discrete Time Signal Processing Switches Filters Integrated CircuitsDocument2 pagesThe Switched Capacitor Resistor: Electronic Circuit Discrete Time Signal Processing Switches Filters Integrated CircuitsAnonymous yD6Qpiq3No ratings yet
- 2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredDocument7 pages2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredAbhijeet KulkarniNo ratings yet
- High Voltage Distribution System (HVDS) - An Alternate For Improvement of Voltage Drop ProfileDocument7 pagesHigh Voltage Distribution System (HVDS) - An Alternate For Improvement of Voltage Drop ProfileHarshita bajajNo ratings yet
- Underexcitation Limiter Models for Power System StabilityDocument5 pagesUnderexcitation Limiter Models for Power System StabilityAnonymous yD6Qpiq3No ratings yet
- HVDS Real Time SimulationDocument10 pagesHVDS Real Time SimulationKashifKihNo ratings yet
- HVDS Real Time SimulationDocument10 pagesHVDS Real Time SimulationKashifKihNo ratings yet
- Substation Layout CBIPDocument82 pagesSubstation Layout CBIPAnonymous yD6Qpiq3No ratings yet
- Smart Embedded System Solar Energy StationsDocument8 pagesSmart Embedded System Solar Energy StationsAnonymous yD6Qpiq3No ratings yet
- Of Grounding System GroundedDocument4 pagesOf Grounding System GroundedThameemul BuhariNo ratings yet
- Pi, PD, Pid ControllersDocument21 pagesPi, PD, Pid ControllersGanesh RadharamNo ratings yet
- Time selective protection - inverse time grading exampleDocument11 pagesTime selective protection - inverse time grading exampleeliahudNo ratings yet
- Poster Iec Tc57Document1 pagePoster Iec Tc57Anonymous yD6Qpiq3No ratings yet
- Cales and Wire July 2013-HavellsDocument45 pagesCales and Wire July 2013-HavellsAnonymous yD6Qpiq3No ratings yet
- Siemens Basic Electricity 1Document56 pagesSiemens Basic Electricity 1spfeifenNo ratings yet
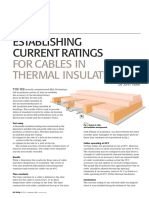
- Current Ratings Cables in Thermal Insulation PDFDocument2 pagesCurrent Ratings Cables in Thermal Insulation PDFAnonymous yD6Qpiq3No ratings yet
- Siemens Basic Electricity 1Document56 pagesSiemens Basic Electricity 1spfeifenNo ratings yet
- Circuit BreakersDocument88 pagesCircuit BreakersAnonymous yD6Qpiq3No ratings yet
- Mathematics January 2020 Paper 2Document34 pagesMathematics January 2020 Paper 2Tamera Green100% (1)
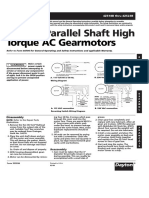
- Dayton Parallel Shaft High: Torque AC GearmotorsDocument12 pagesDayton Parallel Shaft High: Torque AC GearmotorsFelipe Ivan Escudero VidalNo ratings yet
- MATH223 Lecture7 With SolutionDocument17 pagesMATH223 Lecture7 With SolutionRaymond AbesamisNo ratings yet
- Lebanese International University School of EngineeringDocument9 pagesLebanese International University School of EngineeringMohamad AyoubNo ratings yet
- TOKYO-WIKA JOINT OPERATIONDocument1 pageTOKYO-WIKA JOINT OPERATIONBangkit SamosirNo ratings yet
- Pmso - Question BankDocument4 pagesPmso - Question BankdarshanNo ratings yet
- Open Test Series - Paper-1 - (21-09-2021)Document31 pagesOpen Test Series - Paper-1 - (21-09-2021)Yogesh KhatriNo ratings yet
- Masibus 8208 User ManualDocument42 pagesMasibus 8208 User ManualMẫn NguyễnNo ratings yet
- VW 50136 en 2018-03Document10 pagesVW 50136 en 2018-03xu zhangNo ratings yet
- Xenon Test Chambers: We Make Testing SimpleDocument9 pagesXenon Test Chambers: We Make Testing SimpleAman KumarNo ratings yet
- Bird Photography: Keeping It Stable: PhotzyDocument16 pagesBird Photography: Keeping It Stable: PhotzymrpiracyNo ratings yet
- Destroyed Version of ChemistryDocument101 pagesDestroyed Version of ChemistryMarc TeyraNo ratings yet
- Nuttal Some Integrals Involving The Generalized Marcum Q FunctionDocument16 pagesNuttal Some Integrals Involving The Generalized Marcum Q Functionpeppas4643No ratings yet
- Agitators For MixerDocument5 pagesAgitators For MixerErkan TakNo ratings yet
- What Is HPLC Column Conditioning - How Long To EquilibrateDocument5 pagesWhat Is HPLC Column Conditioning - How Long To EquilibrateMubarak PatelNo ratings yet
- Guide For Vessel Sizing PDFDocument24 pagesGuide For Vessel Sizing PDFManish542No ratings yet
- AQU4518R59v06 - 3750 DatasheetDocument2 pagesAQU4518R59v06 - 3750 Datasheetkitticom rNo ratings yet
- Parts and Functions of Incandescent LampsDocument7 pagesParts and Functions of Incandescent LampsJessie Olantigue100% (1)
- Dual polarized 1800/900 MHz antenna quick reference guideDocument20 pagesDual polarized 1800/900 MHz antenna quick reference guideРоманКочневNo ratings yet
- Chemistry Test Iii Form I SECTION A (Marks 30)Document4 pagesChemistry Test Iii Form I SECTION A (Marks 30)Haidary AR RuhayliyNo ratings yet
- ZX 75Document192 pagesZX 75vanhoackdNo ratings yet
- 1 - General Brochure L3MW - EnglDocument2 pages1 - General Brochure L3MW - EnglpietroNo ratings yet
- Light Detection and Ranging (LIDAR)Document25 pagesLight Detection and Ranging (LIDAR)sonusangamNo ratings yet
- Questions Bank On ElectrostaticsDocument2 pagesQuestions Bank On Electrostaticsashok PradhanNo ratings yet
- Manual Instructions For Use AT 900 EnglishDocument20 pagesManual Instructions For Use AT 900 EnglishOmar Sanchez Valero100% (1)
- Wire Terminal and Fixture Testing ToolsDocument1 pageWire Terminal and Fixture Testing ToolsPASCAL LANDSHEERENo ratings yet
- 60 TOP MOST NETWORK THEOREMS - Electrical Engineering Multiple Choice Questions and AnswersDocument6 pages60 TOP MOST NETWORK THEOREMS - Electrical Engineering Multiple Choice Questions and Answersrose maryNo ratings yet
- Analysis and Design of G+5 Mixed Use Building by New EBCS CodeDocument190 pagesAnalysis and Design of G+5 Mixed Use Building by New EBCS CodegirumNo ratings yet
- Mathematical Modeling of Spherical Storage TanksDocument7 pagesMathematical Modeling of Spherical Storage TanksMihaela NastaseNo ratings yet
- 10 Average Atomic Mass-SDocument5 pages10 Average Atomic Mass-S776pmsfq2fNo ratings yet