You might also like
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsFrom EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsRating: 5 out of 5 stars5/5 (1)
- Iso 965-3 PDFDocument23 pagesIso 965-3 PDFRitxar DfNo ratings yet
- Everybody Up 2Document12 pagesEverybody Up 2Stefania PerezNo ratings yet
- Gears - General: Shigley's Mechanical Engineering DesignDocument229 pagesGears - General: Shigley's Mechanical Engineering DesignbasitNo ratings yet
- Hitachi EX120 5 130K 5Document279 pagesHitachi EX120 5 130K 5Yew Lim100% (7)
- 3 - Gear Design PDFDocument136 pages3 - Gear Design PDFRachit100% (1)
- Gear Theory 1Document164 pagesGear Theory 1suneel kumar rathoreNo ratings yet
- GearDocument13 pagesGearAditya TanwarNo ratings yet
- Gear TerminologyDocument21 pagesGear TerminologyAns ahmed100% (1)
- Design of Spur GearDocument67 pagesDesign of Spur GearShubham DhurjadNo ratings yet
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsFrom EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsRating: 4 out of 5 stars4/5 (1)
- ME364-03 Gears GeneralDocument92 pagesME364-03 Gears GeneralumarNo ratings yet
- GearsDocument14 pagesGearsZulhilmi Chik TakNo ratings yet
- BS en 1289 PDFDocument9 pagesBS en 1289 PDFminakirolosNo ratings yet
- Spur GearsDocument96 pagesSpur GearsVamshi Reddy100% (1)
- Flexible Spacecraft Dynamics, Control and GuidanceDocument372 pagesFlexible Spacecraft Dynamics, Control and Guidanceminakirolos75% (4)
- Gears Design MD2Document52 pagesGears Design MD2Faizan MohyuddinNo ratings yet
- 2 Marks: Q & A Spur Gear Terminology and DefinitionsDocument71 pages2 Marks: Q & A Spur Gear Terminology and DefinitionsPrasanna Sekar0% (1)
- Catapillar Equipment Pricing 0701-12Document2,849 pagesCatapillar Equipment Pricing 0701-12MARCO ANTONIO64% (11)
- Encyclopedia of GearsDocument24 pagesEncyclopedia of GearssulemaanNo ratings yet
- Wood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingFrom EverandWood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingNo ratings yet
- Bevel GearDocument9 pagesBevel GearAadil KhanNo ratings yet
- Jackson Patrick Banman Sileci Susan Everybody Up 2 Student BDocument83 pagesJackson Patrick Banman Sileci Susan Everybody Up 2 Student Bminakirolos100% (3)
- Jackson Patrick Banman Sileci Susan Everybody Up 2 Student BDocument83 pagesJackson Patrick Banman Sileci Susan Everybody Up 2 Student Bminakirolos100% (3)
- The Hidden History of The Human Race Klaus DonaDocument20 pagesThe Hidden History of The Human Race Klaus DonaAndCo GeoNo ratings yet
- 4140 High Tensile Steel PDFDocument3 pages4140 High Tensile Steel PDFFikri SiplhoNo ratings yet
- Gear - New World EncyclopediaDocument12 pagesGear - New World EncyclopediaNaveen ChakradharNo ratings yet
- For The Gear-Like Device Used To Drive A Roller Chain, See - This Article Is About Mechanical Gears. For Other Uses, SeeDocument25 pagesFor The Gear-Like Device Used To Drive A Roller Chain, See - This Article Is About Mechanical Gears. For Other Uses, SeeNasir HadranNo ratings yet
- Gear Wikipedia The Free EncyclopediaDocument27 pagesGear Wikipedia The Free EncyclopediaVikas SinghNo ratings yet
- Reporte EngranesDocument10 pagesReporte EngranesOscar SaldivarNo ratings yet
- Gear - WikipediaDocument23 pagesGear - WikipediaChetan PrajapatiNo ratings yet
- Navigation Search Sprocket Gear (Disambiguation)Document38 pagesNavigation Search Sprocket Gear (Disambiguation)M HarmanNo ratings yet
- Gear System: Shri Balwant Institute of TechnologyDocument12 pagesGear System: Shri Balwant Institute of TechnologySreejith BabuNo ratings yet
- Chapter 9 Spur Gear DesignDocument27 pagesChapter 9 Spur Gear Designagung badoNo ratings yet
- Toothed Gears - Spur GearsDocument38 pagesToothed Gears - Spur GearsHarshal RodgeNo ratings yet
- Gearing 1Document5 pagesGearing 1algrsh77No ratings yet
- Design and Performance Analysis of Helical Gear For Al and Steel Material by Using AnsysDocument10 pagesDesign and Performance Analysis of Helical Gear For Al and Steel Material by Using AnsysankNo ratings yet
- Md-Ii 02Document30 pagesMd-Ii 02Ahmed zia tahirNo ratings yet
- Hellical GearsDocument3 pagesHellical GearsLeon987456321No ratings yet
- Grass CutterDocument25 pagesGrass CutterKhalil RazaNo ratings yet
- Chapter 9 Spur Gear DesignDocument122 pagesChapter 9 Spur Gear DesignJimmy Silvera OtañeNo ratings yet
- Gear and Gear TrainDocument23 pagesGear and Gear TrainingridNo ratings yet
- Gear Trains - Lecture 10Document22 pagesGear Trains - Lecture 10priyankar007No ratings yet
- TransmissionDocument13 pagesTransmissionvnpriyamsNo ratings yet
- Spur Gear Design Some New Perspectives DDocument12 pagesSpur Gear Design Some New Perspectives DUsama GulzarNo ratings yet
- 5.0 GearsDocument9 pages5.0 GearsMaggy IrunguNo ratings yet
- Bevel GearDocument28 pagesBevel Gearmahesh kitturNo ratings yet
- Design of Transmission System Unit IIIDocument57 pagesDesign of Transmission System Unit IIIRaj MohanNo ratings yet
- Aplikasi Roda Gigi (Kelompok 2)Document30 pagesAplikasi Roda Gigi (Kelompok 2)Fandrio PermataNo ratings yet
- DVGDocument53 pagesDVGbalajigandhirajanNo ratings yet
- GearDocument19 pagesGearArul DossNo ratings yet
- Bme - Part 2Document44 pagesBme - Part 2Sumanth ChallaNo ratings yet
- Unit I&II Gear DesignDocument130 pagesUnit I&II Gear DesignVishal JaiswalNo ratings yet
- Notes On Gears IIDocument3 pagesNotes On Gears IIRikhil YalamanchiNo ratings yet
- Gear Train PDFDocument10 pagesGear Train PDFABHIJITNo ratings yet
- Chapter 4 Part 1Document37 pagesChapter 4 Part 1Izzat FakhriNo ratings yet
- GEARDocument24 pagesGEARbabublsNo ratings yet
- Helical GearDocument5 pagesHelical GearMohsin IftikharNo ratings yet
- Gears: Looking For GATE Preparation Material? Join & Get Here Now!Document8 pagesGears: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNo ratings yet
- Gears and Gear TrainsDocument127 pagesGears and Gear TrainsVikki KotaNo ratings yet
- Machine Design-Ii: GearsDocument50 pagesMachine Design-Ii: Gearsmuhammad hamzaNo ratings yet
- GearDocument30 pagesGearsai babuNo ratings yet
- 7 Gears: 7.1 Gear ClassificationDocument15 pages7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanNo ratings yet
- Term Paper As in 2 YearDocument25 pagesTerm Paper As in 2 YearRoopak GoyalNo ratings yet
- Dme Ii Oral QuestionDocument8 pagesDme Ii Oral QuestionSanket ThoratNo ratings yet
- Continuously Variable TransmissionDocument33 pagesContinuously Variable Transmissionsk9145100% (1)
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Internal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsFrom EverandInternal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsNo ratings yet
- Type CDT3-F-CGT3-F Tie Rod DesignDocument64 pagesType CDT3-F-CGT3-F Tie Rod DesignminakirolosNo ratings yet
- Specification 01286 SPE EPC 302 210 0001 IFB0-01Document27 pagesSpecification 01286 SPE EPC 302 210 0001 IFB0-01minakirolosNo ratings yet
- Load and Stress Distribution in Screw Threads With Modified WashersDocument11 pagesLoad and Stress Distribution in Screw Threads With Modified WashersminakirolosNo ratings yet
- Tensile Stress AreaDocument1 pageTensile Stress AreaminakirolosNo ratings yet
- Digestive SystemDocument6 pagesDigestive SystemminakirolosNo ratings yet
- DriveDocument2 pagesDriveminakirolosNo ratings yet
- Edrive Eliminator HD BrochureDocument12 pagesEdrive Eliminator HD BrochureminakirolosNo ratings yet
- Eu2e Parentguide3 Review1Document1 pageEu2e Parentguide3 Review1minakirolosNo ratings yet
- Review 1: My Child Will ReviewDocument1 pageReview 1: My Child Will ReviewminakirolosNo ratings yet
- Eu2e Parentguide4 Review1Document1 pageEu2e Parentguide4 Review1minakirolosNo ratings yet
- Eu2e Parentguide2 Review1Document1 pageEu2e Parentguide2 Review1minakirolosNo ratings yet
- Eu2e Parentguide5 Review1Document1 pageEu2e Parentguide5 Review1minakirolosNo ratings yet
- Eu2e Parentguide1 Review1Document1 pageEu2e Parentguide1 Review1minakirolosNo ratings yet
- Everybody Up 3 2nd Edition Student Book PDFDocument99 pagesEverybody Up 3 2nd Edition Student Book PDFminakirolos94% (31)
- He Design Stirling EngineDocument8 pagesHe Design Stirling EngineVlcek VladimirNo ratings yet
- 076cd93b556068cde19190df2db2e956Document2 pages076cd93b556068cde19190df2db2e956minakirolosNo ratings yet
- TDS - Jotamastic 87 GF English (Uk)Document5 pagesTDS - Jotamastic 87 GF English (Uk)RedzuanNo ratings yet
- Thesis FulltextDocument132 pagesThesis Fulltextdormouse1No ratings yet
- 7fbb82dfd8ebdb5137b025facf120677Document32 pages7fbb82dfd8ebdb5137b025facf120677minakirolosNo ratings yet
- Edrive Eliminator HD BrochureDocument12 pagesEdrive Eliminator HD BrochureminakirolosNo ratings yet
- Bearing Load CalculationDocument9 pagesBearing Load CalculationminakirolosNo ratings yet
- Alpha HoistsDocument2 pagesAlpha HoistsminakirolosNo ratings yet
- Sr5050 PartesDocument87 pagesSr5050 PartesLuis GomezNo ratings yet
- Simple Machines TestDocument7 pagesSimple Machines TestAlyanna CrisologoNo ratings yet
- Unbrako New Price List Jan 2021 Hex PDFDocument15 pagesUnbrako New Price List Jan 2021 Hex PDFManoj DoshiNo ratings yet
- Continuously Variable Transmission CVT 1Document8 pagesContinuously Variable Transmission CVT 1Atul GaurNo ratings yet
- Assemble Diff 777DDocument17 pagesAssemble Diff 777DCavandraNo ratings yet
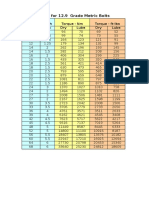
- Torque Chart For 12.9Document7 pagesTorque Chart For 12.9Amit SinghNo ratings yet
- Gear Reference PDFDocument15 pagesGear Reference PDFXuan Phuong HuynhNo ratings yet
- Simple MachinesDocument11 pagesSimple Machinestipen pakombongNo ratings yet
- Manual Willis 2680 PARTSDocument51 pagesManual Willis 2680 PARTSGioNo ratings yet
- Thread Pitch ChartDocument2 pagesThread Pitch ChartChoon Wei WongNo ratings yet
- Din 571Document3 pagesDin 571mugiwara ruffyNo ratings yet
- Fastener Type Chart: Wood Screws Machine Screws Thread Cutting Machine Screws Sheet Metal ScrewsDocument4 pagesFastener Type Chart: Wood Screws Machine Screws Thread Cutting Machine Screws Sheet Metal Screwslemuel bacsaNo ratings yet
- SP 3500-3510 PartesFusorDocument5 pagesSP 3500-3510 PartesFusorJohn Fsco PonceNo ratings yet
- 9-Kinroad XT110GK (Newer Model) Parts ManualDocument14 pages9-Kinroad XT110GK (Newer Model) Parts ManualoakstrNo ratings yet
- Bolts Gain Additional Strength Through The Use of A Nut or Washer As An AnchorDocument3 pagesBolts Gain Additional Strength Through The Use of A Nut or Washer As An AnchorGeraldVirgilioAcusaNo ratings yet
- SKF AgriculturalDocument92 pagesSKF AgriculturalCarlos Casale GonzálezNo ratings yet
- Gear Notes - SlideDocument19 pagesGear Notes - SlideNEF RIDERSNo ratings yet
- SWF Sa SeriesDocument61 pagesSWF Sa SeriesJuciêr AlcântaraNo ratings yet
- Gear TrainsDocument11 pagesGear TrainsAttique JavaidNo ratings yet
- Thread Size Comparison ChartDocument1 pageThread Size Comparison ChartMuharrem BeyogluNo ratings yet
- Punjab Aircraft Maintenance Engineering College, Patiala Procedure Sheet: Module 6 (6.5 To 6.10)Document4 pagesPunjab Aircraft Maintenance Engineering College, Patiala Procedure Sheet: Module 6 (6.5 To 6.10)Arjun SharmaNo ratings yet
- STRANGE - Ford 9 Case InstructionsDocument2 pagesSTRANGE - Ford 9 Case InstructionsoldtrukluvrNo ratings yet
- Lock Nut WasherDocument3 pagesLock Nut WasherParmasamy SubramaniNo ratings yet
- SKF RemeniceDocument91 pagesSKF RemeniceSeherzada Kadric-RibicNo ratings yet
- JK T1377 InstructionDocument45 pagesJK T1377 InstructionJose Antonio Rojas BautistaNo ratings yet