You might also like
- 563650.127535233 Comparison of Different Metal Oxide Surge Arrester ModelsDocument11 pages563650.127535233 Comparison of Different Metal Oxide Surge Arrester ModelsGreen BeretNo ratings yet
- Millimeter-Wave Elliptical Lens Antenna For Fan-BeDocument10 pagesMillimeter-Wave Elliptical Lens Antenna For Fan-BeArun VarshneyNo ratings yet
- CMT 1Document43 pagesCMT 1OLIVER EVERETT ESPINONo ratings yet
- Linearization of Radial Force Characteristic of Active Magnetic Bearings Using Finite Element Method and Differential EvolutionDocument15 pagesLinearization of Radial Force Characteristic of Active Magnetic Bearings Using Finite Element Method and Differential Evolutionharis shehzadNo ratings yet
- Biosensor Technique Based On Optical Waveguide Lightmode Spectroscopy - OWLSDocument23 pagesBiosensor Technique Based On Optical Waveguide Lightmode Spectroscopy - OWLSOWLS Sensors100% (1)
- Design and Analysis of Five Element Microstrip Log-Periodic AntennaDocument6 pagesDesign and Analysis of Five Element Microstrip Log-Periodic AntennaSubhanjali MyneniNo ratings yet
- 10 11648 J Ajop 20150302 12Document5 pages10 11648 J Ajop 20150302 12Gemmy94No ratings yet
- MichelsonFinal2v1 PDFDocument10 pagesMichelsonFinal2v1 PDFpunkrebel95No ratings yet
- Ajp Jphyscol198849c204Document5 pagesAjp Jphyscol198849c204rgrgbgfbfbNo ratings yet
- IEEEMTT SIMSDigest2000v3p1307 1310Document5 pagesIEEEMTT SIMSDigest2000v3p1307 1310ĂbđÃłłÄH H㊪ãÑNo ratings yet
- Comparison of Michelson and Linnik Interference MicroscopesDocument11 pagesComparison of Michelson and Linnik Interference MicroscopesLuis PujayNo ratings yet
- EBeam Lucasreyes1603Document11 pagesEBeam Lucasreyes1603Sebastian FragaNo ratings yet
- Multimode Interference Mmi Devices in Silicon Hollow Waveguide Technology For Military Electro-Optic SystemsDocument10 pagesMultimode Interference Mmi Devices in Silicon Hollow Waveguide Technology For Military Electro-Optic Systemsapi-286308011No ratings yet
- Paper 241852Document5 pagesPaper 241852Gemmy94No ratings yet
- A New Finite Element Formulation For Vibration Analysis of Thick PlatesDocument22 pagesA New Finite Element Formulation For Vibration Analysis of Thick PlatesMatija VasilevNo ratings yet
- A Novel Study of Semiconductor Material As A Substrate Layer For Microstrip Patch AntennaDocument5 pagesA Novel Study of Semiconductor Material As A Substrate Layer For Microstrip Patch AntennaIJAERS JOURNALNo ratings yet
- Panorama Stitching Based On SIFT Algorithm and LevDocument8 pagesPanorama Stitching Based On SIFT Algorithm and LevAmina FENo ratings yet
- Dielectric Waveguides Modes and PropagationDocument18 pagesDielectric Waveguides Modes and PropagationSaswat NayakNo ratings yet
- Spie Invited PaperDocument8 pagesSpie Invited Paperapi-286308011No ratings yet
- Finite Element Solution For Two Dimensional LaplacDocument7 pagesFinite Element Solution For Two Dimensional LaplacSiti UnaeniNo ratings yet
- AxiconDocument12 pagesAxiconthienlp29No ratings yet
- Understanding Horizontal Geodetic Network Precision and Accuracy Determination Using Least Squares TechniqueDocument7 pagesUnderstanding Horizontal Geodetic Network Precision and Accuracy Determination Using Least Squares TechniqueETEJE SYLVESTSTER OKIEMUTE (Ph.D)No ratings yet
- 6 TransMag Magnetic Design Considerations of Bidirectional InductiveDocument5 pages6 TransMag Magnetic Design Considerations of Bidirectional InductivemarwanNo ratings yet
- NJ-ebooks: High Speed Optical ModulatorsDocument6 pagesNJ-ebooks: High Speed Optical ModulatorsNile_JockeyNo ratings yet
- Nonlinear Impact Response of Doubly Curved Composite ShellsDocument6 pagesNonlinear Impact Response of Doubly Curved Composite ShellsVenkata Swamy Naidu NeigapulaNo ratings yet
- Microstrip Interdigital Bandpass Filters Design and OptimizationDocument6 pagesMicrostrip Interdigital Bandpass Filters Design and OptimizationSanthos KumarNo ratings yet
- Wang 2012Document5 pagesWang 2012Tarak BenslimaneNo ratings yet
- Understanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesDocument3 pagesUnderstanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesTommy AsselinNo ratings yet
- Reduction of Speckle Noise in SAR Images With Hybrid Wavelet FilterDocument8 pagesReduction of Speckle Noise in SAR Images With Hybrid Wavelet FilterIJRASETPublicationsNo ratings yet
- Hadj Belga Cem 2017Document6 pagesHadj Belga Cem 2017kurts010No ratings yet
- Nuclear Reaction AnalysisDocument59 pagesNuclear Reaction AnalysisyounessinaNo ratings yet
- 2103 03365 PDFDocument11 pages2103 03365 PDFЭ. Номин-ЭрдэнэNo ratings yet
- Li, Voskoboynikov, Lee, Sze Computational Method BenDaniel DukeDocument4 pagesLi, Voskoboynikov, Lee, Sze Computational Method BenDaniel DukeIstván Róbert NikolényiNo ratings yet
- Imaging electrons in a 1D quantum dot with Coulomb blockade microscopyDocument6 pagesImaging electrons in a 1D quantum dot with Coulomb blockade microscopyjiangqianNo ratings yet
- Analytica Methods For The Extraction of Parameters For Solar Cells EquationsDocument8 pagesAnalytica Methods For The Extraction of Parameters For Solar Cells Equationsdiego.pavanello7081No ratings yet
- Understanding Horizontal Geodetic Network Precision and Accuracy Determination Using Least Squares TechniqueDocument8 pagesUnderstanding Horizontal Geodetic Network Precision and Accuracy Determination Using Least Squares TechniqueGilang NugrahaNo ratings yet
- A Novel Reflective Fiber Optic Current Sensor and Error Characteristics in The Key Optical ComponentsDocument8 pagesA Novel Reflective Fiber Optic Current Sensor and Error Characteristics in The Key Optical ComponentsGuru MishraNo ratings yet
- Nomin-Erdene 2019 IOP Conf. Ser. Mater. Sci. Eng. 704 012008Document7 pagesNomin-Erdene 2019 IOP Conf. Ser. Mater. Sci. Eng. 704 012008NomioAnneNo ratings yet
- Construction and Working of A Babinet's CompensatorDocument3 pagesConstruction and Working of A Babinet's CompensatorKhushal shendeNo ratings yet
- Design of A Magnetic Levitation Control System PDFDocument5 pagesDesign of A Magnetic Levitation Control System PDFEliel Marcos RomanciniNo ratings yet
- Fluids 06 00250Document9 pagesFluids 06 00250cooldudepNo ratings yet
- A Level-Set Approach For Radar Imaging From Ramp RDocument8 pagesA Level-Set Approach For Radar Imaging From Ramp RNewton GomesNo ratings yet
- Best Fit ParaboloidDocument5 pagesBest Fit ParaboloidManoj KumarNo ratings yet
- Itmconf Icacc2020 01004Document6 pagesItmconf Icacc2020 01004MosaddekNo ratings yet
- What Is NanophysicsDocument24 pagesWhat Is Nanophysicsmhd22No ratings yet
- Fem ReportDocument29 pagesFem ReportVarun JamesNo ratings yet
- Ume805 2Document2 pagesUme805 2Raunaq SinghNo ratings yet
- ThetaMetrisis ProductLineDocument19 pagesThetaMetrisis ProductLineThanh NguyenNo ratings yet
- By: Dr. Ahmed MahmoudDocument15 pagesBy: Dr. Ahmed MahmoudMahmoud HosnyNo ratings yet
- Bow Tie Microstrip Antenna DesignDocument5 pagesBow Tie Microstrip Antenna DesignMU Strongest ChannelNo ratings yet
- Lab1 VHDLDocument9 pagesLab1 VHDLMishelzhitha CalderónNo ratings yet
- Micro Photovoltaic Modules For Micro Systems: MRS Online Proceeding Library Archive January 2011Document7 pagesMicro Photovoltaic Modules For Micro Systems: MRS Online Proceeding Library Archive January 2011vkrmkrishnaNo ratings yet
- Optical - Design - of - Linear - Fresnel - Reflector - Solar - C (1) - Compressed - Compressed - CompressedDocument8 pagesOptical - Design - of - Linear - Fresnel - Reflector - Solar - C (1) - Compressed - Compressed - CompressedDaniel morenoNo ratings yet
- Smart Antenna:Weight Calculation and Side-Lobe Reduction by Unequal Spacing TechniqueDocument5 pagesSmart Antenna:Weight Calculation and Side-Lobe Reduction by Unequal Spacing TechniquesubuhpramonoNo ratings yet
- Microstrip Patch Antenna For Wi-Fi and Bluetooth Application in The ISM BandDocument4 pagesMicrostrip Patch Antenna For Wi-Fi and Bluetooth Application in The ISM BandTanko SuleNo ratings yet
- An FDTD Analysis of Nonlinear Photonic Crystal WavDocument13 pagesAn FDTD Analysis of Nonlinear Photonic Crystal WavyassinebouazziNo ratings yet
- H. Kogelnik - Theory of Dielectric WaveguidesDocument69 pagesH. Kogelnik - Theory of Dielectric Waveguides23213m100% (1)
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Ta Iris MechanismDocument131 pagesTa Iris Mechanismdirwan somaNo ratings yet
- An Iris Mechanism Driven Temperature Control of Solar Thermal ReactorsDocument15 pagesAn Iris Mechanism Driven Temperature Control of Solar Thermal Reactorsdirwan somaNo ratings yet
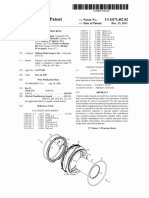
- United States Patent (10) Patent No.: US 8,075,482 B2Document17 pagesUnited States Patent (10) Patent No.: US 8,075,482 B2dirwan somaNo ratings yet
- Design Manufacturing and Testing of A Camera-LikeDocument13 pagesDesign Manufacturing and Testing of A Camera-Likedirwan somaNo ratings yet
- Iris PDFDocument8 pagesIris PDFdirwan somaNo ratings yet
- Pengaruh Preheat Dan Thermal Tensioning Terhadap Sifat Fisis Dan Mekanik Pada Sambungan Las TIG Al 6061-T6Document7 pagesPengaruh Preheat Dan Thermal Tensioning Terhadap Sifat Fisis Dan Mekanik Pada Sambungan Las TIG Al 6061-T6dirwan somaNo ratings yet
- Antenna EffectDocument5 pagesAntenna Effectstudius1No ratings yet
- Constitutional Supercooling During Crystal Growth From Stirred MeltsDocument13 pagesConstitutional Supercooling During Crystal Growth From Stirred MeltsDanilo CurtolloNo ratings yet
- Ultrasonic and Megasonic CleaningDocument10 pagesUltrasonic and Megasonic CleaninglukeaspergerNo ratings yet
- Victory Process – 3D Process SimulatorDocument55 pagesVictory Process – 3D Process SimulatorVandana SinghNo ratings yet
- Bee026 MemsDocument49 pagesBee026 MemsRaviNo ratings yet
- 반도체 용어 사전Document23 pages반도체 용어 사전하종인(korean)No ratings yet
- Steps For IC Manufacturing - VLSI Tutorials - MepitsDocument6 pagesSteps For IC Manufacturing - VLSI Tutorials - MepitsAbhiNo ratings yet
- Samsung Electronics and Semiconductors ProductionDocument55 pagesSamsung Electronics and Semiconductors ProductionDovah KiinNo ratings yet
- Lithography: Patterning Process for Integrated CircuitsDocument22 pagesLithography: Patterning Process for Integrated CircuitsGaganpreetSingh100% (1)
- 3.2 M.E. SyllabusDocument13 pages3.2 M.E. SyllabusAshish SharmaNo ratings yet
- Solar Cell Fabrication Lab ReportDocument8 pagesSolar Cell Fabrication Lab ReportPrateek SinghNo ratings yet
- Deep Wet Etching of Borosilicate Glass Using An Anodically Bonded Silicon Substrate As Mask PDFDocument4 pagesDeep Wet Etching of Borosilicate Glass Using An Anodically Bonded Silicon Substrate As Mask PDFtedmozbiNo ratings yet
- Vdoc - Pub Microchip Fabrication A Practical Guide To Semiconductor ProcessingDocument979 pagesVdoc - Pub Microchip Fabrication A Practical Guide To Semiconductor Processingsaiganeah884No ratings yet
- Silicon Etching With KOHDocument9 pagesSilicon Etching With KOHTito Winnerson SitanggangNo ratings yet
- Device Fabrication Technology: Modern Semiconductor Devices For Integrated Circuits (C. Hu) Slide 3-1Document40 pagesDevice Fabrication Technology: Modern Semiconductor Devices For Integrated Circuits (C. Hu) Slide 3-1Green HeartNo ratings yet
- 5.etch - Part 3 (2) (21613)Document31 pages5.etch - Part 3 (2) (21613)shubhamNo ratings yet
- MEMS Gyroscopes For Consumer and Industrial Applications: Riccardo Antonello and Roberto OboeDocument29 pagesMEMS Gyroscopes For Consumer and Industrial Applications: Riccardo Antonello and Roberto OboeHaroon WaseemNo ratings yet
- EC-415A MidsemDocument2 pagesEC-415A MidsemV Prakash SinghNo ratings yet
- Plasma Etching ReviewDocument48 pagesPlasma Etching Reviewmert100% (1)
- Comb Drive PDFDocument9 pagesComb Drive PDFS PERSIS ALEXNo ratings yet
- 3D and Circuit Integration of MEMS by Masayoshi EsashiDocument502 pages3D and Circuit Integration of MEMS by Masayoshi EsashiAleyna ArslanNo ratings yet
- Making A Multicolor EtchingDocument19 pagesMaking A Multicolor EtchingsyderterranNo ratings yet
- Optimal Bonding of Lithium Disilicate with Universal AdhesiveDocument7 pagesOptimal Bonding of Lithium Disilicate with Universal AdhesiveCatalina GómezNo ratings yet
- MEMS Micromachining Overview: Primary Knowledge Unit Participant GuideDocument33 pagesMEMS Micromachining Overview: Primary Knowledge Unit Participant Guidenamrata saraniaNo ratings yet
- Assgn 1 Muhammad Azim IzzudinDocument4 pagesAssgn 1 Muhammad Azim Izzudinazim izzudinNo ratings yet
- Fabrication of A Piezoresistive Pressure SensorDocument4 pagesFabrication of A Piezoresistive Pressure Sensorsamo25No ratings yet
- Optical Interconnects Synthesis Lectures On Solid State Materials and DevicesDocument104 pagesOptical Interconnects Synthesis Lectures On Solid State Materials and DevicesDaniel TysonNo ratings yet
- 17 pr1 00Document24 pages17 pr1 00openid_ZufDFRTuNo ratings yet
- Integrated Circuit (IC) FabricationDocument39 pagesIntegrated Circuit (IC) FabricationSHAIK MUSTHAFANo ratings yet
- Introduction to MEMS Etching TechniquesDocument16 pagesIntroduction to MEMS Etching TechniquesArjit GoswamiNo ratings yet