You might also like
- Elastic Analysis of Tall Reinforced Concrete Frames On Elastic Sub-Base"Document8 pagesElastic Analysis of Tall Reinforced Concrete Frames On Elastic Sub-Base"mahakNo ratings yet
- Complete Limiting Stress Solutions For The Bearing Capacity of Strip Footings On A Mohr-Coulomb SoilDocument6 pagesComplete Limiting Stress Solutions For The Bearing Capacity of Strip Footings On A Mohr-Coulomb SoilHUGINo ratings yet
- Seismic Loads ECP (201) : Forces Resulting From EarthquakeDocument17 pagesSeismic Loads ECP (201) : Forces Resulting From Earthquakeengineering coursesNo ratings yet
- Fig. 1 Distribution of Inertia Forces To Floors: Cgandcrdo Not CoincideDocument22 pagesFig. 1 Distribution of Inertia Forces To Floors: Cgandcrdo Not CoincideKarla BovellNo ratings yet
- Simplified Multi-Storey Shear Buildoing ModelDocument22 pagesSimplified Multi-Storey Shear Buildoing ModelKmrnKhnNo ratings yet
- Torsional Buckling of I Beam PDFDocument5 pagesTorsional Buckling of I Beam PDFparamarthasom1974No ratings yet
- Characteristics of Local Site Effects on Seismic MotionDocument7 pagesCharacteristics of Local Site Effects on Seismic MotiongreynoiseNo ratings yet
- CE4070 Structural Modelling Yield Line Analysis of Slab IETDocument18 pagesCE4070 Structural Modelling Yield Line Analysis of Slab IETkartheepan100% (1)
- 11 Ch4 5 Pushover AnalysisDocument12 pages11 Ch4 5 Pushover AnalysisWan Fikri DarmawanNo ratings yet
- Paper 5 Page29-32 PDFDocument4 pagesPaper 5 Page29-32 PDFMeghanaNo ratings yet
- 003 Direct ShearDocument29 pages003 Direct ShearMatthewzki FerrerasNo ratings yet
- The Influence of Coupled Horizontal-Vertical Ground Excitations On The Collapse Margins of Modern Rc-MrfsDocument24 pagesThe Influence of Coupled Horizontal-Vertical Ground Excitations On The Collapse Margins of Modern Rc-Mrfsjackfrazer2No ratings yet
- Dislocations PDFDocument5 pagesDislocations PDFdarwin_hua100% (1)
- L09 - SF, SettlementsDocument39 pagesL09 - SF, SettlementsVictor Fon EtotNo ratings yet
- FPL 1834ocrDocument31 pagesFPL 1834ocrNancy TabataNo ratings yet
- Deflection of BeamsDocument7 pagesDeflection of Beamsأحمد عبد الرضا ياسينNo ratings yet
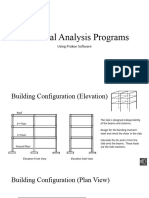
- Architectural and Structural Considerations: Building ConfigurationDocument30 pagesArchitectural and Structural Considerations: Building Configurationmohamed abd elazizNo ratings yet
- Topics in Ship Structural Design: Lecture 5 Buckling and Ultimate Strength of PlatesDocument57 pagesTopics in Ship Structural Design: Lecture 5 Buckling and Ultimate Strength of Platesricardi aryo bimoNo ratings yet
- Earthquake Demand On Buildings - p2Document15 pagesEarthquake Demand On Buildings - p2Alejo Martin MartinNo ratings yet
- FinaldraftDynamicMachinefoundation PDFDocument11 pagesFinaldraftDynamicMachinefoundation PDFnagumtechNo ratings yet
- SettlementDocument38 pagesSettlementaliaa484848No ratings yet
- Just Learn Civil: 1. ModellingDocument10 pagesJust Learn Civil: 1. ModellingganjeyNo ratings yet
- 12SEAGC1996 The Response of Vertical Piles To Ground Movements From Adjacent Braced ExcavationsDocument7 pages12SEAGC1996 The Response of Vertical Piles To Ground Movements From Adjacent Braced ExcavationsfreezefreezeNo ratings yet
- Earthquake-Resistant Design Outline of Topics (2 No. Sessions at 2 Hrs Each) by R. Clarke Delivery MediaDocument19 pagesEarthquake-Resistant Design Outline of Topics (2 No. Sessions at 2 Hrs Each) by R. Clarke Delivery MediastraceymarieNo ratings yet
- Structural Analysis: FundamentalsDocument27 pagesStructural Analysis: FundamentalsBharath V KumarNo ratings yet
- Seismic Performance of Regular and Irregular Flat Slab Structure With Soil Structure InteractionDocument7 pagesSeismic Performance of Regular and Irregular Flat Slab Structure With Soil Structure InteractionVikramNo ratings yet
- Raftfoundations 160423143909Document26 pagesRaftfoundations 160423143909VIGNESH ANo ratings yet
- Deflections of BeamDocument31 pagesDeflections of BeamDiego LoyolaNo ratings yet
- CIVN3011 Structural Analysis of Frames (Slides & Audio)Document22 pagesCIVN3011 Structural Analysis of Frames (Slides & Audio)ditokelomolabeNo ratings yet
- Three-Dimensional Reliability Analysis of Earth SlopesDocument17 pagesThree-Dimensional Reliability Analysis of Earth SlopesbryanerickjorgebNo ratings yet
- Linear-VS-Nonlinear-Buckling - Open AreaDocument22 pagesLinear-VS-Nonlinear-Buckling - Open AreaishitaNo ratings yet
- Reinforced Concrete Design II - ACI 318: Design of Two Way SlabsDocument60 pagesReinforced Concrete Design II - ACI 318: Design of Two Way Slabsmedo eidNo ratings yet
- Soil Structure Interaction SeminarDocument27 pagesSoil Structure Interaction SeminarMT21STR007Mayank KaleNo ratings yet
- The Nonlinear Behavior of A Post-Buckled Circular PlateDocument4 pagesThe Nonlinear Behavior of A Post-Buckled Circular Plateyaser yasNo ratings yet
- IJSRD Study Compares Seismic Behavior of Flat & Post-Tensioned Concrete SlabsDocument4 pagesIJSRD Study Compares Seismic Behavior of Flat & Post-Tensioned Concrete SlabsephNo ratings yet
- 3D Bearing Capacity Probabilistic Analyses of Footings On SpatiallyDocument14 pages3D Bearing Capacity Probabilistic Analyses of Footings On SpatiallyferraNo ratings yet
- MTECH CIVIL ENGINEERING EXAM ON PLATES AND SHELLSDocument2 pagesMTECH CIVIL ENGINEERING EXAM ON PLATES AND SHELLSsimon maaaklaNo ratings yet
- VIV Forces on Deepwater RisersDocument8 pagesVIV Forces on Deepwater RisersFathiya RokanNo ratings yet
- Effect of Diaphragm Flexibility On The Seismic Response of RCC Framed Building Considering Diaphragm DiscontinuityDocument9 pagesEffect of Diaphragm Flexibility On The Seismic Response of RCC Framed Building Considering Diaphragm DiscontinuityInternational Journal of Innovations in Engineering and Science100% (1)
- Training Staad ProDocument33 pagesTraining Staad ProWidya PrasetyaNo ratings yet
- Chapter8 ShallowfoundationDocument69 pagesChapter8 ShallowfoundationAfiq FawwazNo ratings yet
- Torsion and Warping Effects in Open SectionsDocument6 pagesTorsion and Warping Effects in Open SectionsahmedanyNo ratings yet
- Earthquake Engineering - Lecture 2Document91 pagesEarthquake Engineering - Lecture 2Mejia Corporan Roberto EstebanNo ratings yet
- 17 - Curling Stresses in Concrete SlabsDocument43 pages17 - Curling Stresses in Concrete SlabsTariq AzizNo ratings yet
- 1-Structural-Design 2012 Yield LineDocument52 pages1-Structural-Design 2012 Yield LineJake BloggerNo ratings yet
- Determining The Dynamic Parameters of The Structures of The Vibration Machines On An Elastic FoundationDocument4 pagesDetermining The Dynamic Parameters of The Structures of The Vibration Machines On An Elastic FoundationMoqaNo ratings yet
- Modelling: Arrow Shows Local 2 Because of Max MOIDocument10 pagesModelling: Arrow Shows Local 2 Because of Max MOIArinaNo ratings yet
- CE 490 INTRODUCTION TO EARTHQUAKE ENGINEERING CHAPTER 6 SEISMIC ANALYSIS PROCEDURESDocument47 pagesCE 490 INTRODUCTION TO EARTHQUAKE ENGINEERING CHAPTER 6 SEISMIC ANALYSIS PROCEDURESBurak KayaNo ratings yet
- Week 1 - Structural SystemDocument36 pagesWeek 1 - Structural Systemdanis nyaNo ratings yet
- 18curs 08-09Document60 pages18curs 08-09Márton PéterNo ratings yet
- Elastic Settlement and Rotation of Rectangular Footings On Nonhomogeneous SoilDocument5 pagesElastic Settlement and Rotation of Rectangular Footings On Nonhomogeneous SoilAbdelmoez ElgarfNo ratings yet
- Analysis and Design of Reinforced Concrete Slabs: Chapter-1Document66 pagesAnalysis and Design of Reinforced Concrete Slabs: Chapter-1jebril yusufNo ratings yet
- Sismica 1 de AbrilDocument17 pagesSismica 1 de AbrilElba Rossemary Vela MaytaNo ratings yet
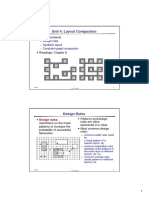
- Layout Compaction OptimizationDocument15 pagesLayout Compaction OptimizationPrabhavathi PNo ratings yet
- Stress Fields and Energies of DislocationDocument30 pagesStress Fields and Energies of DislocationSiam Abrar SaadNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Renormalization and 3-Manifolds Which Fiber over the Circle (AM-142), Volume 142From EverandRenormalization and 3-Manifolds Which Fiber over the Circle (AM-142), Volume 142No ratings yet
- Traction Rolling Stock: ElectricalDocument37 pagesTraction Rolling Stock: ElectricalSamarth GargNo ratings yet
- Commercial 2Document6 pagesCommercial 2Samarth GargNo ratings yet
- Indian National MovementDocument7 pagesIndian National MovementSamarth GargNo ratings yet
- General Services: ElectricalDocument68 pagesGeneral Services: ElectricalSamarth GargNo ratings yet
- Stores MergedDocument261 pagesStores MergedSamarth GargNo ratings yet
- Internal Security: Linkages Between Development and Spread of ExtremismDocument44 pagesInternal Security: Linkages Between Development and Spread of ExtremismSamarth GargNo ratings yet
- Indian National MovementDocument7 pagesIndian National MovementSamarth GargNo ratings yet
- The Revolt of 1857Document8 pagesThe Revolt of 1857Samarth GargNo ratings yet
- Geography Class 11 Fundamentals of Physical Geography PDFDocument153 pagesGeography Class 11 Fundamentals of Physical Geography PDFStephanieNo ratings yet
- Era of Mass Nationalism Begins (1919-1939)Document10 pagesEra of Mass Nationalism Begins (1919-1939)Samarth GargNo ratings yet
- India & South East AsiaDocument6 pagesIndia & South East AsiaSamarth GargNo ratings yet
- British ConquestDocument6 pagesBritish ConquestSamarth GargNo ratings yet
- History 2nd RevDocument76 pagesHistory 2nd RevSamarth GargNo ratings yet
- The Struggle BeginsDocument3 pagesThe Struggle BeginsSamarth GargNo ratings yet
- CVL757: Finite Element Methods: IIT DelhiDocument8 pagesCVL757: Finite Element Methods: IIT DelhiSamarth GargNo ratings yet
- Rise of BritishersDocument6 pagesRise of BritishersSamarth GargNo ratings yet
- IIT Delhi Lecture on Finite Element Methods Introduction and MethodologyDocument14 pagesIIT Delhi Lecture on Finite Element Methods Introduction and MethodologySamarth GargNo ratings yet
- CVL757: Finite Element Methods: IIT DelhiDocument13 pagesCVL757: Finite Element Methods: IIT DelhiSamarth GargNo ratings yet
- CVL757: Finite Element Methods: IIT DelhiDocument13 pagesCVL757: Finite Element Methods: IIT DelhiSamarth GargNo ratings yet
- CVL757: Finite Element Methods: IIT DelhiDocument16 pagesCVL757: Finite Element Methods: IIT DelhiSamarth GargNo ratings yet
- CVL757: Finite Element Methods: IIT DelhiDocument12 pagesCVL757: Finite Element Methods: IIT DelhiSamarth GargNo ratings yet
- Ilp 2017 Set 3 Van Environment 3 PDFDocument58 pagesIlp 2017 Set 3 Van Environment 3 PDFSamarth GargNo ratings yet
- Ilp 2017 Set 3 Van Environment 2 PDFDocument150 pagesIlp 2017 Set 3 Van Environment 2 PDFSamarth GargNo ratings yet
- Stiffness Method For Skeletal StructuresDocument117 pagesStiffness Method For Skeletal StructuresAdyasha KumariNo ratings yet
- Ilp 2017 Set 3 Van Environment 1 PDFDocument70 pagesIlp 2017 Set 3 Van Environment 1 PDFSamarth GargNo ratings yet
- PLASTIC ANALYSIS-new (Autosaved) PDFDocument103 pagesPLASTIC ANALYSIS-new (Autosaved) PDFSamarth GargNo ratings yet
- CVL757: Finite Element Methods: IIT DelhiDocument16 pagesCVL757: Finite Element Methods: IIT DelhiSamarth GargNo ratings yet
- BUC Axle Load CaluationDocument84 pagesBUC Axle Load CaluationSamarth GargNo ratings yet
- Durability of Bituminous Mix CE-463Document37 pagesDurability of Bituminous Mix CE-463Samarth GargNo ratings yet
- Rebar Arrangement and Construction CarryoutDocument113 pagesRebar Arrangement and Construction CarryoutSamitha Harshani88% (8)
- Girder Clamp Concept 1076Document4 pagesGirder Clamp Concept 1076Dan Dela PeñaNo ratings yet
- Staad Pro - DomeDocument9 pagesStaad Pro - DomeV.m. Rajan100% (1)
- Bok:978 94 017 0243 0 PDFDocument277 pagesBok:978 94 017 0243 0 PDFRajen Koley100% (1)
- 4.15 Load-Duration-Factor-Cd-Asd-OnlyDocument4 pages4.15 Load-Duration-Factor-Cd-Asd-OnlynickNo ratings yet
- Aci523 - ImportanteDocument5 pagesAci523 - ImportanteCledson2No ratings yet
- GRP 1 Building Tech.Document59 pagesGRP 1 Building Tech.Kevin EdwinNo ratings yet
- Shear and Moment in BeamsDocument18 pagesShear and Moment in Beamslu siNo ratings yet
- Standard Training Manual: CSC OrionDocument245 pagesStandard Training Manual: CSC OrionMasaba Solomon63% (8)
- Exercises Component Method 2Document57 pagesExercises Component Method 2Vanderleia CalazansNo ratings yet
- Solution To Problem 575 - Horizontal Shearing Stress - Strength of Materials Review Assignment 3Document5 pagesSolution To Problem 575 - Horizontal Shearing Stress - Strength of Materials Review Assignment 3Rehan HakroNo ratings yet
- s0!00!05 - Concrete Reinforcing Lap LengthsDocument1 pages0!00!05 - Concrete Reinforcing Lap LengthshuyxpkissNo ratings yet
- SAP Report of Residential Building at PLMCDocument49 pagesSAP Report of Residential Building at PLMCOpal G CharyaNo ratings yet
- Roof Slab PlanDocument10 pagesRoof Slab PlanghansaNo ratings yet
- Mechanical Engineering Stress AnalysisDocument33 pagesMechanical Engineering Stress AnalysisagniflameNo ratings yet
- Sample Timber DesignDocument42 pagesSample Timber DesignJohny CantonNo ratings yet
- RC Slab and Staircase Design AssignmentDocument7 pagesRC Slab and Staircase Design AssignmentRazNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityfeyayel990No ratings yet
- Plaza 66 Tower 2 Structural Design ChallengesDocument13 pagesPlaza 66 Tower 2 Structural Design ChallengessrvshNo ratings yet
- Slabs in Midas GenDocument50 pagesSlabs in Midas Genmarkespino100% (1)
- Structural SystemsDocument3 pagesStructural SystemsMorteza Rostami100% (1)
- Corbel STMDocument12 pagesCorbel STMShishir Kumar NayakNo ratings yet
- MSCP MST Step by StepDocument6 pagesMSCP MST Step by StepwakkilsNo ratings yet
- Pushover Analysis of Existing Reinforced Concrete Framed StructuresDocument8 pagesPushover Analysis of Existing Reinforced Concrete Framed StructuresNitisha Rathore100% (1)
- CE132P - Theory of Structures 2: Engr. Keith Anshilo DiazDocument3 pagesCE132P - Theory of Structures 2: Engr. Keith Anshilo DiazKeith Anshilo DiazNo ratings yet
- Internship Report CivilDocument35 pagesInternship Report CivilElectro Xexual100% (25)
- Criteria For Structural Design of Barrages and WeirsDocument27 pagesCriteria For Structural Design of Barrages and WeirsVSMS867825% (4)
- International Council For Research and Innovation in Building and Construction Working Commission W18 - Timber StructuresDocument444 pagesInternational Council For Research and Innovation in Building and Construction Working Commission W18 - Timber Structuresaerodanger100% (1)
- Som TutorialsDocument22 pagesSom TutorialsbaizubirajiNo ratings yet
- Lifting Beam Design ReportDocument57 pagesLifting Beam Design Reportmawais15100% (1)