You might also like
- Saej 10 V 003Document4 pagesSaej 10 V 003neojfbNo ratings yet
- ME080 Section 8 - Other Hydraulic ComponentsDocument101 pagesME080 Section 8 - Other Hydraulic ComponentsAhmed FaragNo ratings yet
- Calculation Slewing BearingsDocument12 pagesCalculation Slewing Bearingsbennyferguson100% (1)
- Involute Spline Strength CalculationsDocument1 pageInvolute Spline Strength CalculationsRjgandhi65No ratings yet
- 16 Chapter 7 Digging Force CalculationsDocument34 pages16 Chapter 7 Digging Force Calculationsyounes100% (1)
- Hydraulic Gear Pumps Market 2016 Global Industry SizeDocument8 pagesHydraulic Gear Pumps Market 2016 Global Industry SizefullkuleNo ratings yet
- Shanthi Gears Worm Gear Boxes - Shanthi GearsDocument3 pagesShanthi Gears Worm Gear Boxes - Shanthi Gearsprashant mishraNo ratings yet
- Catalog Varvel RS RTDocument60 pagesCatalog Varvel RS RTNikola VojisavljevicNo ratings yet
- Otr GoodyearDocument170 pagesOtr GoodyearSaiful AhmadNo ratings yet
- PRESSURE VESSEL Handbook - Eugene F. Megyesy 12th 2001Document501 pagesPRESSURE VESSEL Handbook - Eugene F. Megyesy 12th 2001vamcodong71% (7)
- Typical Specification of Volvo Truck PDFDocument3 pagesTypical Specification of Volvo Truck PDFKartik BehereNo ratings yet
- Selection and Adaptation of Hydraulic Cylinders For Tipper HoistingDocument7 pagesSelection and Adaptation of Hydraulic Cylinders For Tipper HoistingManohar M Hegde100% (1)
- BS 6422-1983 (1999) ISO 7546-1983aDocument14 pagesBS 6422-1983 (1999) ISO 7546-1983aLuffy11No ratings yet
- SAE Grades-Oil ViscosityDocument4 pagesSAE Grades-Oil ViscosityMathew John100% (2)
- Technical Data Hoist Drive GH 5000ADocument1 pageTechnical Data Hoist Drive GH 5000AEricNo ratings yet
- Railway Bearings 8501-Ii PDFDocument78 pagesRailway Bearings 8501-Ii PDFCarlo AguiluzNo ratings yet
- Wall Mounted Jib CraneDocument5 pagesWall Mounted Jib CraneRameez Ali FaridiNo ratings yet
- China Heavy Equipments and Its SpecsDocument11 pagesChina Heavy Equipments and Its SpecsLuis Thethird BuotNo ratings yet
- (Culture and History of The Ancient Near East 65) Leslie Anne Warden - Pottery and Economy in Old Kingdom Egypt-Brill Academic Publishers (2014)Document343 pages(Culture and History of The Ancient Near East 65) Leslie Anne Warden - Pottery and Economy in Old Kingdom Egypt-Brill Academic Publishers (2014)HugoBotello100% (1)
- SKF Angular Contact Ball Bearings - Your Key To Longer Service LifeDocument44 pagesSKF Angular Contact Ball Bearings - Your Key To Longer Service LifeBrunoNo ratings yet
- AAPD Reference Manual - Pediatric Dentistry 2010-2011Document336 pagesAAPD Reference Manual - Pediatric Dentistry 2010-2011Tiara100% (1)
- Cat 992B Wheel Loader SpecsDocument6 pagesCat 992B Wheel Loader SpecsLuã Rezende NogueiraNo ratings yet
- Christopher Westra - Laws of Attraction PDFDocument3 pagesChristopher Westra - Laws of Attraction PDFZachary LeeNo ratings yet
- Transfluid Fluid Coupling CatalougeDocument32 pagesTransfluid Fluid Coupling CatalougeNaeem KhanNo ratings yet
- TGN 11 Clip Spacing 09-12Document2 pagesTGN 11 Clip Spacing 09-12kayakeras3335No ratings yet
- Miller 09Document149 pagesMiller 09Emílio BeckerNo ratings yet
- PBL Series K CatalougeDocument117 pagesPBL Series K CatalougeankitkanujiyaNo ratings yet
- Gear Coupling 2014Document4 pagesGear Coupling 2014Dado Maja ArseninNo ratings yet
- (Jean Oliver and Alison Middleditch (Auth.) ) Funct (B-Ok - CC)Document332 pages(Jean Oliver and Alison Middleditch (Auth.) ) Funct (B-Ok - CC)Lorena BurdujocNo ratings yet
- Sigmacare Shade CardDocument2 pagesSigmacare Shade Cardrahul yo yo100% (2)
- "A Study Consumer Satisfaction Towards Royal Enfield BikesDocument72 pages"A Study Consumer Satisfaction Towards Royal Enfield BikesKotresh Kp100% (1)
- The Whole History of the Earth and LifeDocument2 pagesThe Whole History of the Earth and LifeEdward John Tensuan100% (1)
- ISO Gear Standards GuideDocument6 pagesISO Gear Standards GuideEslam YehiaNo ratings yet
- H5 Cargo Truck 6x2 260HP-1 PDFDocument2 pagesH5 Cargo Truck 6x2 260HP-1 PDFIbrahim Fadhl Kalajengking100% (2)
- 40 Ton PayloadDocument1 page40 Ton PayloadSabra A.S.No ratings yet
- Aerator PremiumDocument10 pagesAerator PremiumvijaykumarnNo ratings yet
- Volvo FMX 460 8X4 20 3 Cu M Tipper BS VI Data SheetDocument4 pagesVolvo FMX 460 8X4 20 3 Cu M Tipper BS VI Data SheetPandey BoardNo ratings yet
- SDG PLUMMER BLOCK HOUSINGS FOR SPHERICAL ROLLER BEARINGSDocument26 pagesSDG PLUMMER BLOCK HOUSINGS FOR SPHERICAL ROLLER BEARINGSSandip GhoshNo ratings yet
- Design and Analysis of Telescopic Boom FDocument5 pagesDesign and Analysis of Telescopic Boom FEduardo RateikeNo ratings yet
- Chhuon Aasman Ko, Zameen Se Judhkar.: Presenting The World TractorDocument2 pagesChhuon Aasman Ko, Zameen Se Judhkar.: Presenting The World TractorgitamamNo ratings yet
- Crane Wheels: Worldwide Movement With Wheels FromDocument78 pagesCrane Wheels: Worldwide Movement With Wheels Fromrozi apriNo ratings yet
- Steel-Smith PDF CatalogueDocument93 pagesSteel-Smith PDF CatalogueneetadaeroNo ratings yet
- 152 - HARDOX - 500 - UK - Data Sheet PDFDocument2 pages152 - HARDOX - 500 - UK - Data Sheet PDFneto-portoNo ratings yet
- Stress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894Document7 pagesStress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894anil sajjanarNo ratings yet
- Brakes Research HandbookDocument16 pagesBrakes Research HandbookChandaKundaNo ratings yet
- Is Iso 20474 4 2008Document21 pagesIs Iso 20474 4 2008alamimohamedNo ratings yet
- Bearing NomenclatureDocument4 pagesBearing NomenclatureVaibhav Vithoba Naik100% (1)
- HAISUNG Good3 - Reducer&Drive - CatalogDocument154 pagesHAISUNG Good3 - Reducer&Drive - Catalog032indesignNo ratings yet
- TDY75 Oil-Cooling Electric DrumDocument12 pagesTDY75 Oil-Cooling Electric DrumAlexis Iván Pérez GuerreroNo ratings yet
- Trucks Specifications - MAGNUM - EnGDocument22 pagesTrucks Specifications - MAGNUM - EnGChristopherNo ratings yet
- ECE-111-Sabra A.S. 2011/ ADR RegulationDocument1 pageECE-111-Sabra A.S. 2011/ ADR RegulationSabra A.S.No ratings yet
- INA CatalogueDocument110 pagesINA CatalogueStroia Constantin MariusNo ratings yet
- Presentation SP1600 enDocument16 pagesPresentation SP1600 enDiego YPNo ratings yet
- Hydraulic Cylinder MTD-WI-07Document21 pagesHydraulic Cylinder MTD-WI-07vinothNo ratings yet
- Design Analysis and Optimization of Front Axle For Commercial Vehicle Using CAEDocument7 pagesDesign Analysis and Optimization of Front Axle For Commercial Vehicle Using CAEPradeep Adsare100% (1)
- Slewing Bearings 1Document14 pagesSlewing Bearings 1bennyfergusonNo ratings yet
- AR*il8 Truck Crane SpecificationsDocument7 pagesAR*il8 Truck Crane Specificationsryo asg3No ratings yet
- BS Iso 6099-2009Document80 pagesBS Iso 6099-2009prf1975No ratings yet
- V2 3 6 Final Gear and Differential GearDocument44 pagesV2 3 6 Final Gear and Differential GearDwy Bagus NNo ratings yet
- Tokyu Low Bed Trailer - Sleading 50TDocument1 pageTokyu Low Bed Trailer - Sleading 50TRiyanto RiyantoNo ratings yet
- Fenner Shaft Mounted Speed Reducer Selection ProcedureDocument28 pagesFenner Shaft Mounted Speed Reducer Selection Proceduremanoj983@gmail.comNo ratings yet
- Catalogo Titan Hms 515Document2 pagesCatalogo Titan Hms 515Alexis SalazarNo ratings yet
- Externally Pressurized Bearings Design For ManufactureDocument18 pagesExternally Pressurized Bearings Design For Manufacturebee140676100% (1)
- Cálculo de PandeoDocument4 pagesCálculo de PandeojuanrostagnoNo ratings yet
- Torque Assessment of A Novel Rotor Design For Synchronous Reluctance Motor With Circular and Rectangular Flux BarriersDocument4 pagesTorque Assessment of A Novel Rotor Design For Synchronous Reluctance Motor With Circular and Rectangular Flux BarriersedumacerenNo ratings yet
- Zhang 2011Document5 pagesZhang 2011Sajad Sadeghi MoghadamNo ratings yet
- 6-Bar Linkage Mechanism For Hopper Tipper Hoisting PDFDocument9 pages6-Bar Linkage Mechanism For Hopper Tipper Hoisting PDFManohar M HegdeNo ratings yet
- 10 1016@j Energy 2017 04 154Document32 pages10 1016@j Energy 2017 04 154Edgard Marroquin ColqueNo ratings yet
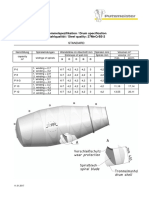
- Trommelspezifikation / Drum Specification Stahlqualität / Steel Quality: 27Mncrb5-2Document1 pageTrommelspezifikation / Drum Specification Stahlqualität / Steel Quality: 27Mncrb5-2Mina RemonNo ratings yet
- Quality Engineering Group ةدوــجلل ةيسدنهلا ةعوـمجملا: Radiographic Test ReportDocument4 pagesQuality Engineering Group ةدوــجلل ةيسدنهلا ةعوـمجملا: Radiographic Test ReportMina RemonNo ratings yet
- Metal Industries Salheya: Quality PolicyDocument5 pagesMetal Industries Salheya: Quality PolicyMina RemonNo ratings yet
- Section J - Overview 2 Modification Code J2 - Truck-Bus Body Fitting 13Document18 pagesSection J - Overview 2 Modification Code J2 - Truck-Bus Body Fitting 13Mina RemonNo ratings yet
- Heat TreatmentDocument2 pagesHeat TreatmentMina RemonNo ratings yet
- TDS - Barrier - English (Uk) - Issued.30.11.2011 PDFDocument4 pagesTDS - Barrier - English (Uk) - Issued.30.11.2011 PDFRedzuanNo ratings yet
- Section R - Overview 2 Modification Code R2 - Wheelchair Loader Installation 13Document16 pagesSection R - Overview 2 Modification Code R2 - Wheelchair Loader Installation 13Mina RemonNo ratings yet
- Techincial Datasheet Aluminium Paint H.R. (Azad Jotun) Glish (Uk) - Issued.26.11.2010Document3 pagesTechincial Datasheet Aluminium Paint H.R. (Azad Jotun) Glish (Uk) - Issued.26.11.2010AzadAhmadNo ratings yet
- Air CoolerDocument13 pagesAir CoolerMina RemonNo ratings yet
- VSB6 SectionH Chassis PDFDocument73 pagesVSB6 SectionH Chassis PDFMina RemonNo ratings yet
- High-build epoxy coating SIGMACOVER 456Document4 pagesHigh-build epoxy coating SIGMACOVER 456Mina RemonNo ratings yet
- TDS - 7417 - Sigmacover - 280Document4 pagesTDS - 7417 - Sigmacover - 280Mina RemonNo ratings yet
- Asme CodeDocument1 pageAsme CodeMina RemonNo ratings yet
- B22 7537 11-2006 Sigmadur 550Document4 pagesB22 7537 11-2006 Sigmadur 550Muhamad HassanNo ratings yet
- High-build epoxy coating SIGMACOVER 456Document4 pagesHigh-build epoxy coating SIGMACOVER 456Mina RemonNo ratings yet
- High-solids zinc epoxy primer data sheetDocument4 pagesHigh-solids zinc epoxy primer data sheetMina RemonNo ratings yet
- Technical Data Sheet for Epoxy Floor CoatingDocument5 pagesTechnical Data Sheet for Epoxy Floor CoatingWilliam SukyonoNo ratings yet
- TDS - Jotamastic 87 - English (Uk) - Issued.21.12.2011 PDFDocument5 pagesTDS - Jotamastic 87 - English (Uk) - Issued.21.12.2011 PDFNPTNo ratings yet
- Jotashield Extreme: Technical Data SheetDocument3 pagesJotashield Extreme: Technical Data SheetAchraf BoudayaNo ratings yet
- Resist 86: Technical Data Sheet Application GuideDocument8 pagesResist 86: Technical Data Sheet Application Guidepmendonça_18No ratings yet
- TDS 515 Jotamastic+87 Euk GBDocument5 pagesTDS 515 Jotamastic+87 Euk GBRebu Ni DinurNo ratings yet
- TDS - Jotashield Fine TexDocument3 pagesTDS - Jotashield Fine TexMina RemonNo ratings yet
- High-build epoxy coating SIGMACOVER 456Document4 pagesHigh-build epoxy coating SIGMACOVER 456Mina RemonNo ratings yet
- DCP Product Summary: Don Construction ProductsDocument36 pagesDCP Product Summary: Don Construction ProductsMina RemonNo ratings yet
- Tankguard DW: Technical Data Sheet Application GuideDocument10 pagesTankguard DW: Technical Data Sheet Application GuideMina RemonNo ratings yet
- Technical Data Sheet Application GuideDocument10 pagesTechnical Data Sheet Application GuideMina RemonNo ratings yet
- Hempathane Hs 55610 55610 En-GbDocument2 pagesHempathane Hs 55610 55610 En-GbfaizalNo ratings yet
- AG 3140 Hardtop+XP Euk GBDocument7 pagesAG 3140 Hardtop+XP Euk GBsibi_s_rajNo ratings yet
- IM PS Fashion-Business-Digital-Communication-And-Media 3Y Course Pathway MI 04Document7 pagesIM PS Fashion-Business-Digital-Communication-And-Media 3Y Course Pathway MI 04oliwia bujalskaNo ratings yet
- XII Class Assignment Programs 2023-24Document8 pagesXII Class Assignment Programs 2023-24Sudhir KumarNo ratings yet
- Combining Singing and PsycologyDocument6 pagesCombining Singing and PsycologyAna luciaNo ratings yet
- 1675.does Concrete Lighten or Change Color As It DriesDocument5 pages1675.does Concrete Lighten or Change Color As It DriestvrNo ratings yet
- WET - AT - AT - 003 - ENG - Manuale Di Istruzione Tenute LubrificateDocument15 pagesWET - AT - AT - 003 - ENG - Manuale Di Istruzione Tenute LubrificateNadia WilsonNo ratings yet
- I3rc Insights Pvt. Ltd. India - Company Credentials PDFDocument28 pagesI3rc Insights Pvt. Ltd. India - Company Credentials PDFManoj Kumar JhaNo ratings yet
- MMC Fiori Cheat Sheet PDFDocument2 pagesMMC Fiori Cheat Sheet PDFAleksandar KNo ratings yet
- Carbon Disulfide: Hazard SummaryDocument5 pagesCarbon Disulfide: Hazard SummaryAlyssa ZerlinaNo ratings yet
- Kelley DavisDocument3 pagesKelley Davisapi-626701108No ratings yet
- Assignments - 2017 09 15 182103 - PDFDocument49 pagesAssignments - 2017 09 15 182103 - PDFMena AlzahawyNo ratings yet
- Robotics Process AutomationDocument21 pagesRobotics Process Automationbhaskarkiran.pNo ratings yet
- Fairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112Document24 pagesFairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112AYUSHNo ratings yet
- Using Previous Years AlmanacDocument1 pageUsing Previous Years AlmanacbhabhasunilNo ratings yet
- DissertationDocument15 pagesDissertationNicole BradyNo ratings yet
- Overview of Research ProcessDocument31 pagesOverview of Research Processprema balusamyNo ratings yet
- Meluha-The Fern Hotel Sustainability ProgramDocument7 pagesMeluha-The Fern Hotel Sustainability Programbushra sayyadNo ratings yet
- 02 Lightning Rods and AccessoriesDocument78 pages02 Lightning Rods and Accessoriesmoosuhaib100% (1)
- Clone CDDocument2 pagesClone CDavk.oracleNo ratings yet
- 1161 Article+Text 5225 1 4 20220712Document9 pages1161 Article+Text 5225 1 4 20220712Warman FatraNo ratings yet
- But Virgil Was Not There": The Lasting Impact of Dante's Homosocial HellDocument7 pagesBut Virgil Was Not There": The Lasting Impact of Dante's Homosocial HellЮлия ЧебанNo ratings yet
- DownloadDocument2 pagesDownloadAmit KumarNo ratings yet
- SCMHRD SM-1Document43 pagesSCMHRD SM-1ShivanirahejaNo ratings yet
- 17a03g - Mosfet - DualDocument5 pages17a03g - Mosfet - DualEletronica01 - BLUEVIXNo ratings yet