You might also like
- 5 Regression PDFDocument115 pages5 Regression PDFhawk91No ratings yet
- Transformations and Misspecification of Econometric Models: August 27, 2014Document19 pagesTransformations and Misspecification of Econometric Models: August 27, 2014Maria RoaNo ratings yet
- Italian Air Quality DataDocument7 pagesItalian Air Quality Databenn yassNo ratings yet
- HX 4Document1 pageHX 4drassuss45No ratings yet
- Data visualization with ggplot2Document54 pagesData visualization with ggplot2Sxk 333No ratings yet
- Lpic Package - L TEX Over Graphics: Vinh Q. NguyenDocument4 pagesLpic Package - L TEX Over Graphics: Vinh Q. Nguyenvinhdizzo6130No ratings yet
- 2014 TestDocument13 pages2014 TestAnonymous gUySMcpSqNo ratings yet
- Model Visualisation: (With Ggplot2)Document25 pagesModel Visualisation: (With Ggplot2)api-14814295No ratings yet
- Sim RDocument6 pagesSim Rsipho23No ratings yet
- STATS 330: Detect and diagnose outliersDocument61 pagesSTATS 330: Detect and diagnose outliersPETERNo ratings yet
- Prelims StatsDocument39 pagesPrelims StatsSergioNo ratings yet
- Applied Econometrics WithDocument50 pagesApplied Econometrics WithSamia NasreenNo ratings yet
- Ch Multiple Linear Regression Everitt HothornDocument12 pagesCh Multiple Linear Regression Everitt HothornRuan CerqueiraNo ratings yet
- Lect6 PDFDocument22 pagesLect6 PDF杜晓晚No ratings yet
- 0E+00 2E+06 4E+06 6E+06 8E+06 1E+07 Purchtermlifeins$IncomeDocument1 page0E+00 2E+06 4E+06 6E+06 8E+06 1E+07 Purchtermlifeins$IncomedavidNo ratings yet
- Lectures Machine LearningDocument205 pagesLectures Machine LearningGuilherme MartheNo ratings yet
- DIP Switch (Rotary Type) A6ADocument4 pagesDIP Switch (Rotary Type) A6AMuhamad PriyatnaNo ratings yet
- 330 Lecture15 2014Document53 pages330 Lecture15 2014PiNo ratings yet
- Differential Expression Analysis of GAB3 in CS vs PTL ConditionsDocument1 pageDifferential Expression Analysis of GAB3 in CS vs PTL ConditionsAmal KatribNo ratings yet
- C2 Statistical LearningDocument37 pagesC2 Statistical LearningLluïsa GualNo ratings yet
- Benzecri Distances (2D) - Rows VisualizationDocument1 pageBenzecri Distances (2D) - Rows VisualizationajquinonespNo ratings yet
- The Bayesian Lasso: Rebecca C. Steorts Predictive Modeling and Data Mining: STA 521Document16 pagesThe Bayesian Lasso: Rebecca C. Steorts Predictive Modeling and Data Mining: STA 521Malika BehroozrazeghNo ratings yet
- EloisaDocument12 pagesEloisastarbridNo ratings yet
- Old Faithful Geyser Data: 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 EruptionsDocument2 pagesOld Faithful Geyser Data: 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 EruptionsNointNo ratings yet
- Old Faithful Geyser Data: 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 EruptionsDocument1 pageOld Faithful Geyser Data: 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 EruptionsarturdelrioNo ratings yet
- MyplotDocument1 pageMyplotsimuNo ratings yet
- Old Faithful Geyser Eruption Times DataDocument1 pageOld Faithful Geyser Eruption Times DataarturdelrioNo ratings yet
- Old Faithful Geyser Data: 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 EruptionsDocument1 pageOld Faithful Geyser Data: 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 EruptionsSantiago ViñanNo ratings yet
- Myplot2 PDFDocument1 pageMyplot2 PDFarturdelrioNo ratings yet
- Problems Encountered On All Sources: Timeouts FailuresDocument1 pageProblems Encountered On All Sources: Timeouts FailuresPatrick PerezNo ratings yet
- LocalGLMnet: A Deep Learning Architecture For ActuariesDocument35 pagesLocalGLMnet: A Deep Learning Architecture For Actuariespapatest123No ratings yet
- Bayesian Structural Time Series ModelsDocument100 pagesBayesian Structural Time Series ModelsClaudyaNo ratings yet
- Learn Time Series Analysis FundamentalsDocument20 pagesLearn Time Series Analysis Fundamentalsenrique gonzalez duranNo ratings yet
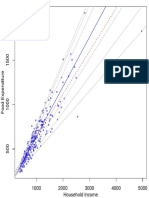
- Food Expenditure vs Household Income GraphDocument1 pageFood Expenditure vs Household Income GraphrojasleopNo ratings yet
- Ejemplo de UsoDocument13 pagesEjemplo de UsoCristian Daniel Quiroz MorenoNo ratings yet
- DIP Switch (Rotary Type) A6C, A6CVDocument3 pagesDIP Switch (Rotary Type) A6C, A6CVMuhamad PriyatnaNo ratings yet
- ClusteringDocument62 pagesClusteringRichard RichieNo ratings yet
- Understanding Copulas and Their ApplicationsDocument22 pagesUnderstanding Copulas and Their ApplicationsWOONGCHAE YOONo ratings yet
- Regression Analysis - From Statistics to Machine LearningDocument50 pagesRegression Analysis - From Statistics to Machine LearningthcNo ratings yet
- Biostatistics of HKU MMEDSC Session2handoutprint3Document23 pagesBiostatistics of HKU MMEDSC Session2handoutprint3Xin chao LiNo ratings yet
- Time SeriesDocument19 pagesTime SeriesKIRAN KHANNo ratings yet
- Ggplot2 Course2 ch5 SlidesDocument23 pagesGgplot2 Course2 ch5 SlidesSxk 333No ratings yet
- Food Expenditure by Household Income GraphDocument1 pageFood Expenditure by Household Income GraphrojasleopNo ratings yet
- Normal Q Q Plot (Sepal - Length) Normal Q Q Plot (Sepal - Width)Document1 pageNormal Q Q Plot (Sepal - Length) Normal Q Q Plot (Sepal - Width)Carlos MunozNo ratings yet
- 6 Slides-Ggplot2 Part1Document27 pages6 Slides-Ggplot2 Part1Ashwani KumarNo ratings yet
- Problems Encountered On All Sources: Timeouts FailuresDocument1 pageProblems Encountered On All Sources: Timeouts FailuresPatrick PerezNo ratings yet
- Midterm STATS 330 testDocument2 pagesMidterm STATS 330 testAnonymous gUySMcpSqNo ratings yet
- Test1 s16 AnswersDocument10 pagesTest1 s16 AnswersJOHNNo ratings yet
- Calcula-Dibuja 4Document23 pagesCalcula-Dibuja 4ENRIQUE CRESPONo ratings yet
- K-Means RKDocument43 pagesK-Means RKPrince JaiswalNo ratings yet
- Economics 536 The Regression FallacyDocument9 pagesEconomics 536 The Regression FallacyMaria RoaNo ratings yet
- Punch Wizard Casts FistDocument1 pagePunch Wizard Casts FistAdamNo ratings yet
- Costs: Developing The Language of CostsDocument27 pagesCosts: Developing The Language of Costsee400bps kudNo ratings yet
- RQ RegsplineDocument1 pageRQ RegsplinerojasleopNo ratings yet
- 0 200 400 600 800 1000 1200 1400 Try2$Operating - Days (Try2$Well - Num "Wellnum 17963")Document4 pages0 200 400 600 800 1000 1200 1400 Try2$Operating - Days (Try2$Well - Num "Wellnum 17963")Luthfi SaifudinNo ratings yet
- Analyzing The Great Firewall of China Over Space ADocument16 pagesAnalyzing The Great Firewall of China Over Space AManuelNo ratings yet
- Math 141: Lecture 18: Correlation and RegressionDocument26 pagesMath 141: Lecture 18: Correlation and RegressionCory DimagibaNo ratings yet
- Coordinates Terrain Rot Level Threat CommentDocument2 pagesCoordinates Terrain Rot Level Threat Commentfrsayhe5tueayher6uNo ratings yet
- Understanding Copulas and Their ApplicationsDocument22 pagesUnderstanding Copulas and Their ApplicationsWOONGCHAE YOONo ratings yet
- Multivariate Statistical Models Chapter: Covariance, Correlation and Linear CombinationsDocument15 pagesMultivariate Statistical Models Chapter: Covariance, Correlation and Linear CombinationsWOONGCHAE YOONo ratings yet
- Chapter 5. Modeling Univariate DistributionsDocument29 pagesChapter 5. Modeling Univariate DistributionsWOONGCHAE YOONo ratings yet
- Chapter 2 ReturnsDocument40 pagesChapter 2 ReturnsWOONGCHAE YOONo ratings yet
- Exam SRM Sample QuestionsDocument50 pagesExam SRM Sample QuestionsWOONGCHAE YOONo ratings yet
- Flat Ends With A Relief GrooveDocument11 pagesFlat Ends With A Relief GrooveEng-CalculationsNo ratings yet
- ERDAS IMAGINE 2011 USER MANUALDocument73 pagesERDAS IMAGINE 2011 USER MANUALNø Wømen Nø CryNo ratings yet
- BNA 924 - GB - GEA Niro Food Brochure - 0209 - 41068 PDFDocument38 pagesBNA 924 - GB - GEA Niro Food Brochure - 0209 - 41068 PDFBane NikolicNo ratings yet
- Bats To The RescueDocument6 pagesBats To The Rescuekamuikanna48No ratings yet
- Basic Calculus: Multiple ChoiceDocument8 pagesBasic Calculus: Multiple ChoiceNinja TanodNo ratings yet
- Juvenile Delinquency NotesDocument26 pagesJuvenile Delinquency NotesBuddhaNo ratings yet
- Calculating A - Linear RegressionDocument28 pagesCalculating A - Linear RegressionPrashant JindalNo ratings yet
- Pile FoundationDocument38 pagesPile FoundationChowdhury PriodeepNo ratings yet
- Minimet 1000Document30 pagesMinimet 1000Javier MartínezNo ratings yet
- Organization: Facility: Location: Reference Check NO. Item 29 CFR 1910.119 YES NO ApplicationDocument14 pagesOrganization: Facility: Location: Reference Check NO. Item 29 CFR 1910.119 YES NO ApplicationCesar Augusto Puma MedinaNo ratings yet
- 2022 Charge Transfer Observed in Light Activated Catalyst ParticlesDocument2 pages2022 Charge Transfer Observed in Light Activated Catalyst ParticlesTien TruongNo ratings yet
- Algebra Class 9Document18 pagesAlgebra Class 9Santosh UpadhyayNo ratings yet
- Effect of Temperature and PH On The Tryptophan FluorescenceDocument19 pagesEffect of Temperature and PH On The Tryptophan FluorescencePedroNo ratings yet
- Sekonic L 206Document17 pagesSekonic L 206Constantinus MagnusNo ratings yet
- THE Contemporary World: (Module 1)Document5 pagesTHE Contemporary World: (Module 1)Ma RiaNo ratings yet
- The Communicative Purpose of The Text: Generic Human Generic Non-Human Participants Passive Voice. Time ConjunctionsDocument2 pagesThe Communicative Purpose of The Text: Generic Human Generic Non-Human Participants Passive Voice. Time ConjunctionsFitriaNo ratings yet
- Automotive Painter Record Book EssentialsDocument21 pagesAutomotive Painter Record Book EssentialsCertified Rabbits LoverNo ratings yet
- Botanical Drawing by Walter Hood Fitch (1817-1892)Document13 pagesBotanical Drawing by Walter Hood Fitch (1817-1892)Monica Perez100% (1)
- UNIT 1 - I Can Get Along: First GradingDocument15 pagesUNIT 1 - I Can Get Along: First GradingEnteng ODNo ratings yet
- A Correspondence Article On "Leading The New Generation Understanding The Leadership Styles of A Millennial School Head"Document4 pagesA Correspondence Article On "Leading The New Generation Understanding The Leadership Styles of A Millennial School Head"Journal of Interdisciplinary PerspectivesNo ratings yet
- Q2 Grasps G9 - Tle Ap ScienceDocument5 pagesQ2 Grasps G9 - Tle Ap ScienceJC LaraNo ratings yet
- MGTI619 - Internship Report-Management Organization Analysis Report (DGKCC)Document27 pagesMGTI619 - Internship Report-Management Organization Analysis Report (DGKCC)zrdNo ratings yet
- Pakistan Lecture Natural Resources CultureDocument3 pagesPakistan Lecture Natural Resources CultureMalik50% (2)
- Bronze Age EuropeDocument10 pagesBronze Age EuropeVíctor Alfonso Medina LugoNo ratings yet
- Masdar-The City of FutureDocument20 pagesMasdar-The City of Futurernbzmtw6rwNo ratings yet
- Individuals and Societies GuideDocument69 pagesIndividuals and Societies GuiderterrygNo ratings yet
- Comprehensive Cellulose Chemistry - Vol. 1 - Fundamentals and Analytical MethodsDocument286 pagesComprehensive Cellulose Chemistry - Vol. 1 - Fundamentals and Analytical MethodsrodsNo ratings yet
- The Standard Penetration Test - Its Application and Interpretation - Stroud-1989Document21 pagesThe Standard Penetration Test - Its Application and Interpretation - Stroud-1989Rajeev Kusugal67% (3)
- Pulping of Pineapple Leaves VillaberDocument5 pagesPulping of Pineapple Leaves VillaberJonaisa FandiyaNo ratings yet
- Sustainability 11 02054Document18 pagesSustainability 11 02054GaniyuNo ratings yet