You might also like
- Flight: Delhi To Doha (QR 4781) : Airline Baggage Policy WebsiteDocument3 pagesFlight: Delhi To Doha (QR 4781) : Airline Baggage Policy WebsiteNeeraj ChawlaNo ratings yet
- Hydrogen OSTIDocument40 pagesHydrogen OSTIAnurag BholeNo ratings yet
- Operation and Maintenance Manual Kes 7 & Kes 11: Kirloskar Pneumatic Company LTD., Pune - 411 013 IndiaDocument64 pagesOperation and Maintenance Manual Kes 7 & Kes 11: Kirloskar Pneumatic Company LTD., Pune - 411 013 IndiaMaroof Ali100% (1)
- Maintenance Manual SinotruckDocument21 pagesMaintenance Manual SinotruckCôn LuânNo ratings yet
- Hybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 CertifiedDocument9 pagesHybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 Certifiedsatya_vanapalli3422No ratings yet
- Flywheel Energy FormulaDocument9 pagesFlywheel Energy Formulaalexbusinesss100% (1)
- Man Tgs - Specifications: ChassisDocument3 pagesMan Tgs - Specifications: ChassisTiago AlvesNo ratings yet
- LTO EXAM ReviewerDocument10 pagesLTO EXAM ReviewerSalvador Calimbayan Jr.100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Design and Analysis of Prototype Tesla Turbine For Power Generation ApplicationsDocument7 pagesDesign and Analysis of Prototype Tesla Turbine For Power Generation ApplicationssakshiNo ratings yet
- DNV Os-H205Document45 pagesDNV Os-H205ndesigngmail100% (1)
- Fundamental Understanding of The Physics of A Small-Scale Vertical Axis Wind Turbine With Dynamic Blade Pitching: An Experimental and Computational ApproachDocument21 pagesFundamental Understanding of The Physics of A Small-Scale Vertical Axis Wind Turbine With Dynamic Blade Pitching: An Experimental and Computational Approachmtl0612No ratings yet
- Maersk: Betting On Blockchain: A Case Study Presented by Group 9Document8 pagesMaersk: Betting On Blockchain: A Case Study Presented by Group 9PRASHANT SACHWANINo ratings yet
- Notes and Cases On The Law On Transportation and Public UtilitiesDocument53 pagesNotes and Cases On The Law On Transportation and Public Utilitiespeanut47100% (2)
- Analysis of Wind Power For Battery Charging: Eduard Muljadi Stephen Drouilhet Richard HolzDocument9 pagesAnalysis of Wind Power For Battery Charging: Eduard Muljadi Stephen Drouilhet Richard HolzHaider AddewanyNo ratings yet
- Wind Turbine Using Doubly Fed Induction Generator Systems For Wind TurbinesDocument3 pagesWind Turbine Using Doubly Fed Induction Generator Systems For Wind Turbinesanil kasotNo ratings yet
- Book Chapter SenroySirDocument29 pagesBook Chapter SenroySirHafsah MushtaqNo ratings yet
- Bog HoseDocument29 pagesBog HoseNadia BnNo ratings yet
- Sam Williamson Modelling and Simulation of A Pico Hydropower Off Grid Network PDFDocument28 pagesSam Williamson Modelling and Simulation of A Pico Hydropower Off Grid Network PDFGabriel SimmerNo ratings yet
- Power Electronics Powertrain ArchitecturDocument6 pagesPower Electronics Powertrain ArchitecturArumi MarNo ratings yet
- Dvanced Ngineering: Abstract: This Paper Deals With The Design of Kinetic Energy Recovery Systems (KERS) byDocument12 pagesDvanced Ngineering: Abstract: This Paper Deals With The Design of Kinetic Energy Recovery Systems (KERS) bypaulsonp_2No ratings yet
- Kinetic Energy Recovery SystemDocument13 pagesKinetic Energy Recovery SystemJainul PatelNo ratings yet
- Wind Hybrid Station For Stability &reactive Modeling and Optimization of Remote SolarDocument6 pagesWind Hybrid Station For Stability &reactive Modeling and Optimization of Remote SolarAngelo Aco MendozaNo ratings yet
- Tec 2009 2025323Document10 pagesTec 2009 2025323Elpidio ragaNo ratings yet
- Variable-Speed Wind Power Generation UsingDocument8 pagesVariable-Speed Wind Power Generation Usingsrinu240000100% (1)
- RDocument8 pagesRhamza gaNo ratings yet
- Wind Generation SystemDocument9 pagesWind Generation SystemShreya BagariaNo ratings yet
- Dynamical Sliding Mode Power Control of Wind Driven Induction GeneratorsDocument7 pagesDynamical Sliding Mode Power Control of Wind Driven Induction GeneratorsRiad ToufoutiNo ratings yet
- Optimal Cost Analysis of Wind-Solar Hybrid System Powered AC and DC Irrigation Pumps Using HOMERDocument5 pagesOptimal Cost Analysis of Wind-Solar Hybrid System Powered AC and DC Irrigation Pumps Using HOMERJhon Sebastian Arias ValenciaNo ratings yet
- Cardenas (2001)Document11 pagesCardenas (2001)jhonatanNo ratings yet
- Wavelet-Transform Based EnergyDocument7 pagesWavelet-Transform Based EnergyАлексей ЯмаNo ratings yet
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDocument11 pages5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanNo ratings yet
- Chapter 1Document72 pagesChapter 1sunilkumareceNo ratings yet
- (Ajay Singh) Review On Control Techniques For VSWT NewDocument6 pages(Ajay Singh) Review On Control Techniques For VSWT NewAjay SinghNo ratings yet
- Control Analysis of PMSG Based Wind Energy Conversion System Using Buck-Boost ConverterDocument8 pagesControl Analysis of PMSG Based Wind Energy Conversion System Using Buck-Boost ConverterAnonymous 0MQ3zRNo ratings yet
- Aggregated Wind Park Models For Analyzing Power System DynamicsDocument10 pagesAggregated Wind Park Models For Analyzing Power System Dynamicsmohamed faisalNo ratings yet
- Dynamic Analysis of A Grid-Connected Induction Generator Driven by A Wave-Energy Turbine Through Hunting NetworksDocument5 pagesDynamic Analysis of A Grid-Connected Induction Generator Driven by A Wave-Energy Turbine Through Hunting NetworksEngrImranKhanNo ratings yet
- Modelling and Simulation of Grid Connected Wind Energy SystemDocument5 pagesModelling and Simulation of Grid Connected Wind Energy SystemNadia BnNo ratings yet
- Wind Turbine Modelling 1Document8 pagesWind Turbine Modelling 1Reda AlHamwiNo ratings yet
- 1 s2.0 S0045790608000906 MainDocument14 pages1 s2.0 S0045790608000906 MainKaderNo ratings yet
- New Grid Connected Hybrid Generation System Using Wind Turbine and Solar Dish/Stirling EngineDocument7 pagesNew Grid Connected Hybrid Generation System Using Wind Turbine and Solar Dish/Stirling EngineASHOKNo ratings yet
- Selection of CapacitorsDocument9 pagesSelection of CapacitorsbatchurajaNo ratings yet
- Automatically Regulated C.V.T. in Wind PDFDocument12 pagesAutomatically Regulated C.V.T. in Wind PDFمهيمن فالح حمدNo ratings yet
- Statcom & DBRDocument18 pagesStatcom & DBRAlok Bikash SadangiNo ratings yet
- Wing MilDocument7 pagesWing MilAkash AkuNo ratings yet
- Irjet V7i6885Document4 pagesIrjet V7i6885monu patelNo ratings yet
- 1 s2.0 S0360544209003879 MainDocument8 pages1 s2.0 S0360544209003879 MainMohamed AlNo ratings yet
- Design of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorDocument9 pagesDesign of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorChetan GhatageNo ratings yet
- Stand-Alone Wind Power System Operating With A Specific Storage StructureDocument6 pagesStand-Alone Wind Power System Operating With A Specific Storage StructureAnbalagan GuruNo ratings yet
- Energy Recovery From Landing AircraftDocument8 pagesEnergy Recovery From Landing AircraftRaniero FalzonNo ratings yet
- Power and Energy Analysis of Commercial Small Wind Turbine SystemsDocument6 pagesPower and Energy Analysis of Commercial Small Wind Turbine SystemsKamal DrawilNo ratings yet
- Modeling of Solar/wind Hybrid Energy System Using MTALAB SimulinkDocument4 pagesModeling of Solar/wind Hybrid Energy System Using MTALAB SimulinkMahar Nadir AliNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Modelling and Controlof A Wind Turbine Using PermaDocument8 pagesModelling and Controlof A Wind Turbine Using PermaALEJANDRO JOSE VARGAS OPORTONo ratings yet
- Continuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDocument17 pagesContinuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDork654651No ratings yet
- Emulation of Wind Turbine System Using Vector Controlled Induction Motor DriveDocument6 pagesEmulation of Wind Turbine System Using Vector Controlled Induction Motor DriveJuan Sebas Causil Causil RamirezNo ratings yet
- Voltage Regulation in Hybrid Solar and Wind Energy System Using Sepic ConverterDocument8 pagesVoltage Regulation in Hybrid Solar and Wind Energy System Using Sepic ConverterdineshkumarNo ratings yet
- Effectiveness of Battery-Supercapacitor Combination in Electric VehiclesDocument6 pagesEffectiveness of Battery-Supercapacitor Combination in Electric VehiclesHanumant ChikuNo ratings yet
- Intech-Small Wind Turbine Power Controllers PDFDocument25 pagesIntech-Small Wind Turbine Power Controllers PDFTedros KassaNo ratings yet
- Modelling of Hybrid System (Solar and Wind) For Power Generation SystemDocument4 pagesModelling of Hybrid System (Solar and Wind) For Power Generation SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorDocument6 pagesApplication of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorchetanNo ratings yet
- NEW Final Report 3rd Sem DFIGDocument61 pagesNEW Final Report 3rd Sem DFIGSiva ForeviewNo ratings yet
- Control The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorDocument7 pagesControl The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorhassenbbNo ratings yet
- One-Power-Point Operation For Variable Speed Wind/ Tidal Stream Turbines With Synchronous GeneratorsDocument10 pagesOne-Power-Point Operation For Variable Speed Wind/ Tidal Stream Turbines With Synchronous GeneratorsHuibin ZhangNo ratings yet
- Wind Solar HybridDocument14 pagesWind Solar HybridmpurperNo ratings yet
- Electric Power Systems ResearchDocument9 pagesElectric Power Systems Researchhussein assiNo ratings yet
- Laboratory Model of Small Hydropower Plant With Variable Speed OperationDocument6 pagesLaboratory Model of Small Hydropower Plant With Variable Speed OperationJacinto DianitoNo ratings yet
- Optimum Photovoltaic Array Size For A Hybrid Wind/PV SystemDocument7 pagesOptimum Photovoltaic Array Size For A Hybrid Wind/PV SystemHassan El-kholyNo ratings yet
- GPSC 37 Paper - Yuva Full BookDocument686 pagesGPSC 37 Paper - Yuva Full BooksakshiNo ratings yet
- GPSC 12PYQ EN Since2016Document224 pagesGPSC 12PYQ EN Since2016sakshiNo ratings yet
- 2017 2127 24aprDocument2 pages2017 2127 24aprsakshiNo ratings yet
- Best of Standup - Standup Comedy Show Comedy-ShowDocument1 pageBest of Standup - Standup Comedy Show Comedy-ShowsakshiNo ratings yet
- CFD Analysis of Supersonic Exhaust in A Scramjet EngineDocument7 pagesCFD Analysis of Supersonic Exhaust in A Scramjet EnginesakshiNo ratings yet
- Finite Element Methods: "Numerical Methods Partial Differential Equations"Document3 pagesFinite Element Methods: "Numerical Methods Partial Differential Equations"sakshiNo ratings yet
- Sent Automotive Engineering - 1st PDFDocument260 pagesSent Automotive Engineering - 1st PDFsakshiNo ratings yet
- Kie Profile 150921 - CorporateDocument86 pagesKie Profile 150921 - CorporateMurs M RazakNo ratings yet
- BIRKDocument19 pagesBIRKGFNo ratings yet
- E-Bike First Draft 2020Document11 pagesE-Bike First Draft 2020Jonathan AssefaNo ratings yet
- 22nd Century Klingon ShipsDocument4 pages22nd Century Klingon Shipsa bNo ratings yet
- ArticleDocument22 pagesArticlefNo ratings yet
- MUIR - 2005 - A Practical Guide To Re-Treatment of Gold Processing ResiduesDocument14 pagesMUIR - 2005 - A Practical Guide To Re-Treatment of Gold Processing ResiduesLeonardo RezendeNo ratings yet
- Regs Full Question BankDocument13 pagesRegs Full Question BankarvindNo ratings yet
- Honda CA77 Dream 305 Illustrated Parts List Diagram ManualDocument115 pagesHonda CA77 Dream 305 Illustrated Parts List Diagram ManualLeon998No ratings yet
- Airbus A320 Family - WikipediaDocument17 pagesAirbus A320 Family - WikipediaAndreea Tataru StanciNo ratings yet
- Weir - WarrantyDocument2 pagesWeir - WarrantyCarlos F. Várguez CardeñaNo ratings yet
- Stels 400 EnduroDocument150 pagesStels 400 EnduroLjupco NikolovskiNo ratings yet
- Transport ManualDocument106 pagesTransport ManualClaude DowNo ratings yet
- Tiago XZ Owners ManualDocument200 pagesTiago XZ Owners ManualVen ANo ratings yet
- Eaton Ultrashift PlusDocument3 pagesEaton Ultrashift PlusJuan Diego Vergel RangelNo ratings yet
- Rt-138 - A1 Lubricating Oils Data & SpecificationsDocument3 pagesRt-138 - A1 Lubricating Oils Data & Specifications郑开元No ratings yet
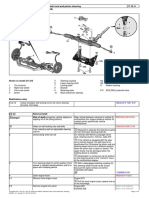
- Remove - Install Rack-And-Pinion Steering1Document4 pagesRemove - Install Rack-And-Pinion Steering1maniNo ratings yet
- 33 - Effective Pages: Beechcraft CorporationDocument98 pages33 - Effective Pages: Beechcraft CorporationFábio VieiraNo ratings yet
- Woods LC102 Operator's ManualDocument54 pagesWoods LC102 Operator's ManualRichardMartinNo ratings yet
- Parts ManualDocument1,098 pagesParts ManualnestorpintocNo ratings yet
- JC Pre InvoiceDocument2 pagesJC Pre InvoiceGeomap Surveyors and BuildersNo ratings yet
- Toyota Motor Manufacture USA: Syndicate 7 - Blemba 28Document11 pagesToyota Motor Manufacture USA: Syndicate 7 - Blemba 28natya lakshitaNo ratings yet