You might also like
- 7SJ62-64 Manual AA V046401 UsDocument715 pages7SJ62-64 Manual AA V046401 UsstunnchuckNo ratings yet
- 0012 MACH-Pro SeriesDocument2 pages0012 MACH-Pro SeriesLê Quốc KhánhNo ratings yet
- PS1000 - PCS DatasheetDocument7 pagesPS1000 - PCS DatasheetgoalexNo ratings yet
- Uas Owners Manual Smog Hog SHDocument16 pagesUas Owners Manual Smog Hog SHAnonymous Q9i062VNo ratings yet
- Positioner SIPART PS2 en-USDocument248 pagesPositioner SIPART PS2 en-USLucian IftemieNo ratings yet
- PXR Series Catalog & Technical DatasheetDocument36 pagesPXR Series Catalog & Technical DatasheetNiten GuptaNo ratings yet
- PS2 IomDocument320 pagesPS2 IomKarthik SivaNo ratings yet
- S800 I O Modules Ans800 - I - O - Modules - and - Termination - Unitsd Termination UnitsDocument668 pagesS800 I O Modules Ans800 - I - O - Modules - and - Termination - Unitsd Termination UnitsdleonarenNo ratings yet
- ABB System 800xa 6.1 AC 800M - Controller HardwareDocument442 pagesABB System 800xa 6.1 AC 800M - Controller HardwareRoger GimenesNo ratings yet
- P1001 Argus Overcurrent Document SetDocument4 pagesP1001 Argus Overcurrent Document SetInayat HathiariNo ratings yet
- 9700 ManualDocument64 pages9700 ManualGilberto OlveraNo ratings yet
- WS400-1500 SpecsDocument2 pagesWS400-1500 Specspram_yudhaNo ratings yet
- Vivoil P enDocument90 pagesVivoil P enHorea CordunianuNo ratings yet
- Powerflex 7000 Medium Voltage Ac Drives: Troubleshooting GuideDocument122 pagesPowerflex 7000 Medium Voltage Ac Drives: Troubleshooting GuideahilsergeyNo ratings yet
- Manual AC2800-BA-enDocument34 pagesManual AC2800-BA-enAhmedNo ratings yet
- Sensor de TierraDocument3 pagesSensor de TierraAnonymous FXM2q3hM2No ratings yet
- Requirements For Medium-Voltage Transformers and Transformers For Internal Power Supply For Sunny Central and Sunny Central StorageDocument20 pagesRequirements For Medium-Voltage Transformers and Transformers For Internal Power Supply For Sunny Central and Sunny Central StorageShiaTVfanNo ratings yet
- FIDVRDocument33 pagesFIDVRmypoll1001No ratings yet
- HBL BatteriesDocument36 pagesHBL BatteriesDebnath Roychowdhury100% (1)
- PVS-175-TL - Product Manual en-RevA (M0000045AG)Document186 pagesPVS-175-TL - Product Manual en-RevA (M0000045AG)Anibal Vargas100% (1)
- Master Drive 6RA70 Parameter ListDocument186 pagesMaster Drive 6RA70 Parameter Listsanjaya srivastava100% (3)
- MPM 10 100 User Manual 1503305994Document57 pagesMPM 10 100 User Manual 1503305994ngdnamNo ratings yet
- User Manual ACS1000WDocument166 pagesUser Manual ACS1000Whuichuan wang100% (1)
- RLC 1st ManualDocument141 pagesRLC 1st Manualjaved shaikh chaandNo ratings yet
- DENSO Robotics Catalog D2277470 PDFDocument52 pagesDENSO Robotics Catalog D2277470 PDFjohnNo ratings yet
- Toyo Intelligent Inverter: Operating ManualDocument344 pagesToyo Intelligent Inverter: Operating ManualLAZZOLAANo ratings yet
- Technical Data SheetDocument14 pagesTechnical Data SheetRavi Ranjan VermaNo ratings yet
- Danfoss VLT 6000 SeriesDocument3 pagesDanfoss VLT 6000 SeriesnansusanNo ratings yet
- SF Gas Insulated Ring Main Unit RMUDocument24 pagesSF Gas Insulated Ring Main Unit RMUr_mukuyuNo ratings yet
- SG2-5K User ManualDocument72 pagesSG2-5K User Manualanh nguyenNo ratings yet
- Firmware ManualDocument146 pagesFirmware ManualBhaskar AddepalliNo ratings yet
- SGDV Servopack PDFDocument398 pagesSGDV Servopack PDFMuryadiNo ratings yet
- User Manual For SA Series: Smart & AccurateDocument133 pagesUser Manual For SA Series: Smart & AccurateJean GrimNo ratings yet
- Información Seccionador ALDUTI S&CDocument20 pagesInformación Seccionador ALDUTI S&CANTONIO OLMEDO AVALOSNo ratings yet
- Thyrotronic (Russian) (1.1 MB)Document8 pagesThyrotronic (Russian) (1.1 MB)brobataNo ratings yet
- NHA41798-01 AccuSine+ IP00-lP20 InstallationDocument82 pagesNHA41798-01 AccuSine+ IP00-lP20 InstallationbenNo ratings yet
- Dale Power Solutions LTD: DC Thyristor Systems Datasheet Erskine Single Phase Input DCV RangeDocument4 pagesDale Power Solutions LTD: DC Thyristor Systems Datasheet Erskine Single Phase Input DCV RangeYousefNo ratings yet
- IM201304 ConextCoreXCSeries Installation Manual 990 4613B Rev C PDFDocument82 pagesIM201304 ConextCoreXCSeries Installation Manual 990 4613B Rev C PDFvmramakrishnanNo ratings yet
- Manual For 200EVMA-U2 - ReduceDocument43 pagesManual For 200EVMA-U2 - ReduceMuhammad Edo RaynaldoNo ratings yet
- Installation/Operating Manual: Submersible Borehole PumpDocument88 pagesInstallation/Operating Manual: Submersible Borehole PumpMarco BustosNo ratings yet
- ATMLH724Document1 pageATMLH724Mano OhanianNo ratings yet
- Accusine PCS+ Active Harmonic Filter Accusine PFV+ Electronic Var ControlDocument50 pagesAccusine PCS+ Active Harmonic Filter Accusine PFV+ Electronic Var Controldhanasekhar27No ratings yet
- Dse5560 Operator ManualDocument61 pagesDse5560 Operator ManualElias100% (1)
- 2CSC400002D0208Document751 pages2CSC400002D0208Pedro BortotNo ratings yet
- GenAdvisor ManualDocument66 pagesGenAdvisor ManualCristian VillalbaNo ratings yet
- G120 PM2402 HW Inst Man 0817 en-US PDFDocument160 pagesG120 PM2402 HW Inst Man 0817 en-US PDFNagarajan RajamanickamNo ratings yet
- Obsolescent and Obsolete Circuit Breakers SDDocument33 pagesObsolescent and Obsolete Circuit Breakers SDjavier1539No ratings yet
- CAPDIS M4 V8 eDocument2 pagesCAPDIS M4 V8 emadamada1No ratings yet
- Inverter SpareDocument8 pagesInverter SpareGauraw KumarNo ratings yet
- ABB Nema STD MotorDocument96 pagesABB Nema STD MotordjsmoniNo ratings yet
- Servo Drive Unit: Maintenance Manual Bliv-D Type A (1St Edition)Document59 pagesServo Drive Unit: Maintenance Manual Bliv-D Type A (1St Edition)Hoangvinh DuongNo ratings yet
- 02 20020100 V1.10 EVRC2A Manual Circuit BreakerDocument40 pages02 20020100 V1.10 EVRC2A Manual Circuit Breakercacr_72No ratings yet
- 101467453Document132 pages101467453Laura CabarteNo ratings yet
- 1100a SeriesDocument62 pages1100a SeriesJudith Araceli HerreraNo ratings yet
- Ts100 02Document10 pagesTs100 02los hermanos ValiNo ratings yet
- ACTIVE CUBE. Operating Instructions Frequency Inverter 230V - 400V 0.25 Kw... 132 KWDocument260 pagesACTIVE CUBE. Operating Instructions Frequency Inverter 230V - 400V 0.25 Kw... 132 KWمحمود الحلبيNo ratings yet
- Spindle Drive Unit: Maintenance Manual Vaciv (1St Edition)Document68 pagesSpindle Drive Unit: Maintenance Manual Vaciv (1St Edition)vdsantos74No ratings yet
- Operator'S, Organizational, Direct Support and General Support Maintenance Manual FORDocument31 pagesOperator'S, Organizational, Direct Support and General Support Maintenance Manual FORWurzel1946No ratings yet
- User Guide S800 I-ODocument432 pagesUser Guide S800 I-OMarcelo OliveiraNo ratings yet
- ACT1000 and ACT1000HF Linear ActuatorsDocument2 pagesACT1000 and ACT1000HF Linear ActuatorsivanNo ratings yet
- ACT1000 User ManualDocument45 pagesACT1000 User ManualivanNo ratings yet
- ACT1000 and ACT1000HF Linear ActuatorsDocument2 pagesACT1000 and ACT1000HF Linear ActuatorsivanNo ratings yet
- Old Project DocsDocument28 pagesOld Project DocsivanNo ratings yet
- Rev 1Document2 pagesRev 1ivanNo ratings yet
- Synchronous Servomotors Series 6SM27..107: Technical Description, Installation, Commissioning Edition 12/2001Document36 pagesSynchronous Servomotors Series 6SM27..107: Technical Description, Installation, Commissioning Edition 12/2001Emiro Revilla CatariNo ratings yet
- Kollmorgen B With ServoStar S and CD TB CatalogDocument10 pagesKollmorgen B With ServoStar S and CD TB CatalogElectromateNo ratings yet
- A Guide To Motion Control Technology Systems and Programming Issue - 2lowres PDFDocument68 pagesA Guide To Motion Control Technology Systems and Programming Issue - 2lowres PDFferiferiNo ratings yet
- Manual MH800 Series Electro Hydraulic ServoDocument169 pagesManual MH800 Series Electro Hydraulic Servotuan voNo ratings yet
- Alxion: For Direct DriveDocument56 pagesAlxion: For Direct DriveAnselmo Aguado cortesNo ratings yet
- Missile Guidance ControlDocument24 pagesMissile Guidance ControlD.Viswanath100% (3)
- Dynamic Modeling and Optimal Control of Cone-Shaped Active Magnetic Bearing SystemsDocument11 pagesDynamic Modeling and Optimal Control of Cone-Shaped Active Magnetic Bearing SystemsVu MinhNo ratings yet
- Phase I: Wellbore Navigation, IncDocument15 pagesPhase I: Wellbore Navigation, InccprobesNo ratings yet
- Brushless Servo Motors: Installation and Operating ManualDocument24 pagesBrushless Servo Motors: Installation and Operating ManualSantiago Ortiz PalacioNo ratings yet
- Alphard (Chassis) IndDocument70 pagesAlphard (Chassis) Indwatna100% (2)
- Motion Control HandbookDocument38 pagesMotion Control HandbookwilfredoNo ratings yet
- Conceptual Modelling of An EV-Permanent Magnet Synchronous Motor Digital TwinDocument5 pagesConceptual Modelling of An EV-Permanent Magnet Synchronous Motor Digital Twinanandhu r nairNo ratings yet
- Visual Drive Setup: Parameterization Software For INFRANOR Drives User ManualDocument69 pagesVisual Drive Setup: Parameterization Software For INFRANOR Drives User ManualfritzzagNo ratings yet
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocument100 pagesOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- Driver Elcom Easy 600Document31 pagesDriver Elcom Easy 600Diego DiegoNo ratings yet
- Qus Mod 4.2 PCBDocument14 pagesQus Mod 4.2 PCBJagbir SinghNo ratings yet
- Question Bank - Unit IVDocument4 pagesQuestion Bank - Unit IVjames RNo ratings yet
- Hi-Rel Modular Two-Speed Synchro/Resolver To Digital ConverterDocument10 pagesHi-Rel Modular Two-Speed Synchro/Resolver To Digital Converterharis_fikriNo ratings yet
- Tyco SensoresDocument10 pagesTyco SensoresFernando Nerys da Silva Nerys NerysNo ratings yet
- Thesis PMSMDocument87 pagesThesis PMSMmanas jenaNo ratings yet
- 08 Grp11 Hybrid MCP BDocument10 pages08 Grp11 Hybrid MCP Beurospeed2No ratings yet
- User Manual - Precision Gas Fuel Metering Valve Hfg20Document70 pagesUser Manual - Precision Gas Fuel Metering Valve Hfg20Nhat Tran100% (1)
- What Is Mechatronics ?Document103 pagesWhat Is Mechatronics ?Sanjay PSNo ratings yet
- Tm400 The Basics of Motion ControlDocument53 pagesTm400 The Basics of Motion ControlEdward ArmijoNo ratings yet
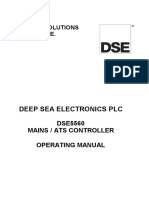
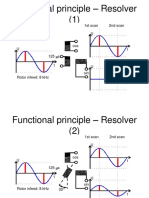
- Resolver Functional PrincipleDocument8 pagesResolver Functional PrincipleNick RivieraNo ratings yet
- Motion Electronics in AvionicsDocument5 pagesMotion Electronics in AvionicsMurat GörükmezNo ratings yet
- Servo MotorDocument31 pagesServo Motoradiamiru25% (4)
- Sensor Types and ClassificationDocument40 pagesSensor Types and Classificationilkay KOZAK100% (1)
- Me2028 Notes Rejinpaul PDFDocument91 pagesMe2028 Notes Rejinpaul PDFkr_padmavathiNo ratings yet
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (9)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsFrom EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNo ratings yet
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)