You might also like
- SEL 13 - PROT401 - LinePilotProtection - r4Document56 pagesSEL 13 - PROT401 - LinePilotProtection - r4bureyh98No ratings yet
- 03 PROT405 IndustrialPowerSystemProt r4Document79 pages03 PROT405 IndustrialPowerSystemProt r4Hector AguilarNo ratings yet
- Comunications FundamentalsDocument271 pagesComunications FundamentalsDiego100% (1)
- Manual Utilizador TD420 - Ed1 - 2.2.0 - Uk PDFDocument457 pagesManual Utilizador TD420 - Ed1 - 2.2.0 - Uk PDFPaulo MandingaNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Power System Protection Course AgendaDocument3 pagesPower System Protection Course AgendaABHINAV SAURAVNo ratings yet
- Substation Comms IntroDocument23 pagesSubstation Comms IntroNeelakandan MasilamaniNo ratings yet
- Session 22 - APPS - Substation Comms Intro PDFDocument46 pagesSession 22 - APPS - Substation Comms Intro PDFmubarakkirko100% (1)
- UNCC 2013 WorkshopDocument241 pagesUNCC 2013 WorkshopRicardo HungriaNo ratings yet
- RSTP PRP HSRDocument32 pagesRSTP PRP HSRShan DeepNo ratings yet
- 00b - PROT 401 Agenda and TOC 20050216 StudentDocument3 pages00b - PROT 401 Agenda and TOC 20050216 Studentراكان خالدNo ratings yet
- Discrete Wavelet Transforms - Algorithms and Applications PDFDocument308 pagesDiscrete Wavelet Transforms - Algorithms and Applications PDFabhishek sharmaNo ratings yet
- Poweredge Recloserscontrols PDFDocument159 pagesPoweredge Recloserscontrols PDFkhoaminh97No ratings yet
- 2 Teleprotection - 2Document21 pages2 Teleprotection - 2sabill arasyidNo ratings yet
- Modbus CommunicationDocument6 pagesModbus CommunicationRakeysh SharmaNo ratings yet
- Arc Model PDFDocument67 pagesArc Model PDFdankorankoNo ratings yet
- Security-Chapter1 - 1 - Intro - 1.0 - v1.0 PDFDocument18 pagesSecurity-Chapter1 - 1 - Intro - 1.0 - v1.0 PDFAlexandra Buendia100% (1)
- 6 Energy InfrastructureDocument32 pages6 Energy InfrastructuremeraatNo ratings yet
- 16mpe05 Completeissue PDFDocument124 pages16mpe05 Completeissue PDFDaniel AlvaradoNo ratings yet
- Hands-On Exercise: Arc-Flash Job Done Settings and Testing ExampleDocument5 pagesHands-On Exercise: Arc-Flash Job Done Settings and Testing Exampleabdelmouen larfiNo ratings yet
- 03 TLP Using Directional Overcurrent Elements Part I r5Document46 pages03 TLP Using Directional Overcurrent Elements Part I r5afmNo ratings yet
- François GallonDocument47 pagesFrançois Gallontiny_nithNo ratings yet
- Substation Communications: An Introduction to Protocols and StandardsDocument23 pagesSubstation Communications: An Introduction to Protocols and StandardsnooralhudNo ratings yet
- Application of Sectionalizers On Distribution SystemDocument8 pagesApplication of Sectionalizers On Distribution SystemRafat ThongNo ratings yet
- FOLD presentation-WAMSDocument41 pagesFOLD presentation-WAMShemanth727No ratings yet
- 03b App751 Optional Ocelementshandson r9 PDFDocument8 pages03b App751 Optional Ocelementshandson r9 PDFabdelmouen larfiNo ratings yet
- A2C4 39+Electrical+Transient+InteractionDocument66 pagesA2C4 39+Electrical+Transient+InteractionicovinyNo ratings yet
- 110KV BUS BAR SchemeDocument35 pages110KV BUS BAR Schememaxwell parassiNo ratings yet
- Diagnostic Measurements On Instrument TransformersDocument7 pagesDiagnostic Measurements On Instrument TransformersMauricio AgudeloNo ratings yet
- 11-Nonconv CT and VTDocument29 pages11-Nonconv CT and VTCarlos PlaceresNo ratings yet
- PID Control ExplainedDocument29 pagesPID Control Explainedsrikanthislavatu7615No ratings yet
- Model Development and Validation of Brushless ExcitersDocument8 pagesModel Development and Validation of Brushless ExcitersAmberMeerabNo ratings yet
- ABB Connectivity PackagesDocument102 pagesABB Connectivity Packagestin_gabby4876100% (1)
- 329 Guidelines For Specification and Evaluation of Substation Automation SystemsDocument90 pages329 Guidelines For Specification and Evaluation of Substation Automation Systemsgefregmail.comNo ratings yet
- 4 - SIPROTEC 5 - Applications OverviewDocument12 pages4 - SIPROTEC 5 - Applications OverviewHafid BaradjaNo ratings yet
- Power System Protection ECE 456Document50 pagesPower System Protection ECE 456Praveen Paul100% (1)
- Dynamic Structural Rigid and Flexible Bus Design in Air Insulated SubstationsDocument8 pagesDynamic Structural Rigid and Flexible Bus Design in Air Insulated SubstationsnashapkNo ratings yet
- Protección Diferencial de Barras DistribuidaDocument15 pagesProtección Diferencial de Barras DistribuidayesrojasNo ratings yet
- 998 1175581 Harmonic Mitigation SolutionDocument10 pages998 1175581 Harmonic Mitigation SolutionSing-Yew LAMNo ratings yet
- Power Plant Protection CoordinationDocument200 pagesPower Plant Protection Coordinationesee57No ratings yet
- Flashover Model of Arcing Horn in Transient SimulationDocument5 pagesFlashover Model of Arcing Horn in Transient SimulationNovia Khoirul AnnisaNo ratings yet
- Automatic Fault Analysis in Power System PDFDocument171 pagesAutomatic Fault Analysis in Power System PDFAshok KumarNo ratings yet
- Impact of HVDC Stations On Protection of AC Systems: Working Group JWG B5/B4.25Document84 pagesImpact of HVDC Stations On Protection of AC Systems: Working Group JWG B5/B4.25Billy ConnorNo ratings yet
- Investigation+of+Magnetizing+Inrush+Current+in+a+Single PhasetransformerDocument6 pagesInvestigation+of+Magnetizing+Inrush+Current+in+a+Single PhasetransformerpcelisNo ratings yet
- 04a Traditional Directional Relays Exercise r6Document6 pages04a Traditional Directional Relays Exercise r6afmNo ratings yet
- RET 630 Differential ProtectionDocument33 pagesRET 630 Differential ProtectionNarvin Raj ChandraNo ratings yet
- Synchronized phasor measurements in power systems reviewDocument7 pagesSynchronized phasor measurements in power systems reviewmgavrilasNo ratings yet
- Sync Check With Voltage Selection and VTs With Different Ratio enDocument8 pagesSync Check With Voltage Selection and VTs With Different Ratio enJose Antonio Huamani ChuquirimayNo ratings yet
- 07a - Instrument - Transformers - Tech - r8 401Document77 pages07a - Instrument - Transformers - Tech - r8 401tajudeen100% (1)
- Distribution Device CoordinationDocument60 pagesDistribution Device CoordinationCatrina FedericoNo ratings yet
- Smart Grid Future PDFDocument40 pagesSmart Grid Future PDFPoojaNo ratings yet
- Power System Protection Presentation Dated 03-10-2013 Integrated Protection ControlDocument89 pagesPower System Protection Presentation Dated 03-10-2013 Integrated Protection ControlNagarajan GanesanNo ratings yet
- ATPDraw - Graphical Preprocessor for ATP-EMTP Circuit SimulationsDocument27 pagesATPDraw - Graphical Preprocessor for ATP-EMTP Circuit SimulationsdbzoNo ratings yet
- COMPUTER METHODS IN POWER SYSTEMS NOTESDocument58 pagesCOMPUTER METHODS IN POWER SYSTEMS NOTESPower System Analysis-1No ratings yet
- Jlpea 05 00234Document23 pagesJlpea 05 00234alokNo ratings yet
- Introduction To Digital Signal Processing: Dr. Hugh Blanton ENTC 4347Document16 pagesIntroduction To Digital Signal Processing: Dr. Hugh Blanton ENTC 4347nikika1No ratings yet
- What Is Analog-To-Digital Conversion (ADC)Document7 pagesWhat Is Analog-To-Digital Conversion (ADC)SmiLy PeRsoNNo ratings yet
- Unit-1 Introduction To Digital Signal ProcessingDocument3 pagesUnit-1 Introduction To Digital Signal Processingpratik2882002No ratings yet
- Digital Signal Processing - An IntroductionDocument35 pagesDigital Signal Processing - An Introductionmeseret sisayNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument18 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument21 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument18 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument21 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument21 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Device settings and test resultsDocument18 pagesDevice settings and test resultstajudeenNo ratings yet
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument6 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLAtajudeenNo ratings yet
- Device settings and test resultsDocument18 pagesDevice settings and test resultstajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument18 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Test Certificate of Energy Meter J K Cement Works, Nimbahera / Thermax LTDDocument7 pagesTest Certificate of Energy Meter J K Cement Works, Nimbahera / Thermax LTDtajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument21 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
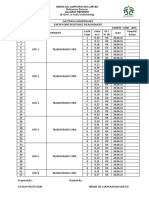
- Electrical Equipment Earth Point Resistance MeasurementsDocument13 pagesElectrical Equipment Earth Point Resistance MeasurementstajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument21 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument21 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- NM, GuguDocument2 pagesNM, GugutajudeenNo ratings yet
- Xjba KJBXDocument23 pagesXjba KJBXtajudeenNo ratings yet
- Device settings and test resultsDocument16 pagesDevice settings and test resultstajudeenNo ratings yet
- Device settings and test resultsDocument18 pagesDevice settings and test resultstajudeenNo ratings yet
- Quickcmc1: Test ModuleDocument3 pagesQuickcmc1: Test ModuletajudeenNo ratings yet
- Device settings and test resultsDocument21 pagesDevice settings and test resultstajudeenNo ratings yet
- HvavbcjDocument5 pagesHvavbcjtajudeenNo ratings yet
- Device settings and test resultsDocument18 pagesDevice settings and test resultstajudeenNo ratings yet
- Quickcmc1: Test ModuleDocument3 pagesQuickcmc1: Test ModuletajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument18 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Quickcmc1: Test ModuleDocument3 pagesQuickcmc1: Test ModuletajudeenNo ratings yet
- Quickcmc1: Test ModuleDocument3 pagesQuickcmc1: Test ModuletajudeenNo ratings yet
- Quickcmc1: Test ModuleDocument12 pagesQuickcmc1: Test ModuletajudeenNo ratings yet
- QuickCMC1 UV PICK UP TestsDocument4 pagesQuickCMC1 UV PICK UP TeststajudeenNo ratings yet
- Quickcmc1: Test Object - Device SettingsDocument18 pagesQuickcmc1: Test Object - Device SettingstajudeenNo ratings yet
- Quickcmc1: Test ModuleDocument12 pagesQuickcmc1: Test ModuletajudeenNo ratings yet
- Infographic Registration of Pharmaceutical Product For General Sale 637828524496205508Document1 pageInfographic Registration of Pharmaceutical Product For General Sale 637828524496205508Kdp03No ratings yet
- Bangla FoodsDocument6 pagesBangla FoodsSubadrika DarmadewiNo ratings yet
- Development of Automatic Mini Fan with PIR SensorDocument8 pagesDevelopment of Automatic Mini Fan with PIR SensorToheebdareNo ratings yet
- ASPE Data Book Volume 1 & 2 - Attachment For Pump Head CalculationDocument2 pagesASPE Data Book Volume 1 & 2 - Attachment For Pump Head CalculationibnrafeeqNo ratings yet
- English 8-Quiz On Context CluesDocument2 pagesEnglish 8-Quiz On Context CluesMELINDA FERRERNo ratings yet
- Manifest Guide Ebook PDFDocument4 pagesManifest Guide Ebook PDFAnonymous dqCHWEADzNo ratings yet
- Comprehension Y9aDocument9 pagesComprehension Y9angwenping5No ratings yet
- Subway's Fresh Look: CEO Suzanne Greco Is Taking The Company To A Whole New Level With The Fresh Forward RebrandDocument9 pagesSubway's Fresh Look: CEO Suzanne Greco Is Taking The Company To A Whole New Level With The Fresh Forward RebrandTanvir KhanNo ratings yet
- JW1782BDocument13 pagesJW1782BGustavo AlonsoNo ratings yet
- Structural Dyanmics-Anna University Q PaperDocument7 pagesStructural Dyanmics-Anna University Q PaperVijay AravindNo ratings yet
- Paper1202169 2180 PDFDocument12 pagesPaper1202169 2180 PDFManish AnandNo ratings yet
- Stress 1Document28 pagesStress 1DrAma StabLeNo ratings yet
- F 25 Sensor Family Miniature Sensors for Precision DetectionDocument34 pagesF 25 Sensor Family Miniature Sensors for Precision DetectionAlex GarduñoNo ratings yet
- Cambridge English Pre A1 Starters Classroom Activities PDFDocument16 pagesCambridge English Pre A1 Starters Classroom Activities PDFFrank Guevara100% (2)
- Dynamic Simulation of Insulin-Glucose Interaction in Type 1 Diabetes With MATLAB Simulink®Document11 pagesDynamic Simulation of Insulin-Glucose Interaction in Type 1 Diabetes With MATLAB Simulink®Jonas KristantoNo ratings yet
- Sample Weekly Home Learning PlansDocument2 pagesSample Weekly Home Learning PlansJINGKY HUMAMOYNo ratings yet
- Honda Civic OBD0 EF ECU PINOUTS - My Pro Street PDFDocument11 pagesHonda Civic OBD0 EF ECU PINOUTS - My Pro Street PDFWill ?100% (2)
- CerebrumDocument26 pagesCerebrumsanthiyasandy100% (1)
- Nike Run Club 5K Training PlanDocument25 pagesNike Run Club 5K Training PlanSalvador0% (1)
- Toyota Forklift 42 6fgcu15!42!6fgcu18 Parts CatalogDocument22 pagesToyota Forklift 42 6fgcu15!42!6fgcu18 Parts Catalogjosephrichards120800wpq100% (110)
- Pump CommissioningDocument1 pagePump CommissioningMD SAMANNo ratings yet
- Realtime Physics: Active Learning Labs Transforming The Introductory LaboratoryDocument14 pagesRealtime Physics: Active Learning Labs Transforming The Introductory LaboratorysaleemNo ratings yet
- EA PSC Substation Earthing Course Leaflet PSC006CL MAR15Document2 pagesEA PSC Substation Earthing Course Leaflet PSC006CL MAR15David RothwellNo ratings yet
- FCL Shipment Specific Quotation For BRIDGESTONE AMERICAS INCDocument3 pagesFCL Shipment Specific Quotation For BRIDGESTONE AMERICAS INCmustova81No ratings yet
- Operations ManualDocument534 pagesOperations ManualAlthea Joy Castor SobretodoNo ratings yet
- Public List Programs by Specialty 460Document9 pagesPublic List Programs by Specialty 460Enta SyngNo ratings yet
- Mapsco Street GuidesDocument5 pagesMapsco Street Guidesapi-256961360No ratings yet
- Determination of Equilibrium Constant (KeqDocument0 pagesDetermination of Equilibrium Constant (KeqPablo BernalNo ratings yet
- Ch.2 Case and Duct SystemDocument11 pagesCh.2 Case and Duct Systemcpt.ghostNo ratings yet
- Meng 2nd Year Death Anniversary MassDocument6 pagesMeng 2nd Year Death Anniversary Massjoy in the spirit of the lordNo ratings yet