You might also like
- Bolospeed RC CalculatorDocument4 pagesBolospeed RC CalculatorDanielRao56% (9)
- V-500, V-500 MAX - Americas (52763-18-PM Rev 1)Document77 pagesV-500, V-500 MAX - Americas (52763-18-PM Rev 1)vickers75% (4)
- 360 Degree Conveyor Belt PDFDocument4 pages360 Degree Conveyor Belt PDFUpendra BingundiNo ratings yet
- Report Experiment ThreadDocument11 pagesReport Experiment Threadsparklingstars2705No ratings yet
- Ball Traction Drive - FinalDocument46 pagesBall Traction Drive - FinalTejas Shete0% (1)
- Design of ClutchDocument47 pagesDesign of Clutchjoyelpaul100% (1)
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet
- Schema R290Document1 pageSchema R290Kenosa100% (1)
- DTS QB WatermarkDocument491 pagesDTS QB WatermarkbeemasundarNo ratings yet
- ME6601Document28 pagesME6601Sridiwakaran ParameswaranNo ratings yet
- Power Trains: Lecture Note Prepared By: Tibebu MDocument52 pagesPower Trains: Lecture Note Prepared By: Tibebu MTibebu MerideNo ratings yet
- Four Bar LinkageDocument13 pagesFour Bar LinkageMBHladilekNo ratings yet
- 04 Power TransmissionDocument16 pages04 Power TransmissionVasudev Gupta100% (1)
- Introduction To Mechanism and KinematicsDocument17 pagesIntroduction To Mechanism and Kinematicsfieramina83% (6)
- MULTI NUT BOLT TIGHTNER OR REMOVER Report 2Document14 pagesMULTI NUT BOLT TIGHTNER OR REMOVER Report 2TeChNo CreAtioNNo ratings yet
- Elementary Transmission For Transforming Rotary Into Translatory MotionDocument14 pagesElementary Transmission For Transforming Rotary Into Translatory Motionshreyas jadhavNo ratings yet
- Gear & Gear TrainDocument20 pagesGear & Gear Trainniaz kilamNo ratings yet
- Basics of Belt DrivesDocument12 pagesBasics of Belt DrivesSrinivasan Ravi100% (1)
- Belt DrivesDocument17 pagesBelt DrivesAbebe AyingdaNo ratings yet
- Theory of Machine Unit 1Document122 pagesTheory of Machine Unit 1Deepak PrajapatNo ratings yet
- Basic Principles of Turbo MachinesDocument6 pagesBasic Principles of Turbo Machinesbinho58100% (1)
- Chapter 3 Gears and Gear Trains 19 PDFDocument37 pagesChapter 3 Gears and Gear Trains 19 PDFMITTAPALLI PAVAN KUMAR REDDYNo ratings yet
- Assignment ClutchDocument624 pagesAssignment ClutchSubhash KNo ratings yet
- Mechanics of Machines II ExamsDocument2 pagesMechanics of Machines II ExamsCharles OndiekiNo ratings yet
- Pulleys and Belt DrivesDocument16 pagesPulleys and Belt DrivesRAHUL16398No ratings yet
- Transmission of Motion and PowerDocument62 pagesTransmission of Motion and PowerVishith ReddyNo ratings yet
- Cam and Follower MechanismDocument44 pagesCam and Follower MechanismAkshay100% (1)
- Robot SpecificationsDocument5 pagesRobot SpecificationsRajeesh JNo ratings yet
- Gear TrainDocument14 pagesGear TrainShiva SuprithNo ratings yet
- 3.two Rotor SystemDocument4 pages3.two Rotor SystemRahul Kumar DwivediNo ratings yet
- Design of Machine ElementDocument30 pagesDesign of Machine ElementVigneswaran K100% (1)
- Parts and Working of Fluid Power SystemsDocument14 pagesParts and Working of Fluid Power SystemsnidhidarklordNo ratings yet
- Master PPT DesignDocument15 pagesMaster PPT DesignUsama Epn Abdelmksoud AhmedNo ratings yet
- Hydraulics and Pneumatics Question PaperDocument29 pagesHydraulics and Pneumatics Question PaperSenthilvel C100% (2)
- Design and Static Analysis of Gearbox For A CNCDocument9 pagesDesign and Static Analysis of Gearbox For A CNCأحمد دعبسNo ratings yet
- DTS - NotesDocument75 pagesDTS - NotesS A ABDUL SUKKURNo ratings yet
- 1406 Advanced Kinematics and Dynamics of MachineryDocument13 pages1406 Advanced Kinematics and Dynamics of MachineryChiranjeev JainNo ratings yet
- Experiment No.: Experiment Name:: TypesDocument4 pagesExperiment No.: Experiment Name:: TypesMirMdMarufHossainNo ratings yet
- Belt Drive SystemDocument37 pagesBelt Drive SystemHaris ShahidNo ratings yet
- Governor ProblemsDocument3 pagesGovernor ProblemsPappuRamaSubramaniamNo ratings yet
- Portable Electric Power Tilling Machine Project ReviewDocument8 pagesPortable Electric Power Tilling Machine Project ReviewP KalaivaniNo ratings yet
- Belt DriveDocument30 pagesBelt DriveRakeshNo ratings yet
- Belt DrivesDocument16 pagesBelt Driveschandru100% (1)
- Chapter 1 Mechanisms of MachineryDocument34 pagesChapter 1 Mechanisms of MachineryFira tubeNo ratings yet
- Design of Shafts CouplingsDocument45 pagesDesign of Shafts CouplingsRavi Teja100% (3)
- Automotive ResistancesDocument13 pagesAutomotive ResistancesSweetiSharmaNo ratings yet
- Couplings PDFDocument34 pagesCouplings PDFAhmed El-Shafei100% (1)
- Assignment: A and A Wheel WeighingDocument1 pageAssignment: A and A Wheel WeighingIshfaqurNo ratings yet
- Gears and TransmissionsDocument27 pagesGears and TransmissionsAshish ChaturvediNo ratings yet
- Final Year Project ReportDocument20 pagesFinal Year Project ReportAnkit PatelNo ratings yet
- Flat Belt Drive Lecture Note - Shu PDFDocument64 pagesFlat Belt Drive Lecture Note - Shu PDFraj gangwarNo ratings yet
- Belt & Rope DrivesDocument26 pagesBelt & Rope Drivesarpit089100% (1)
- Energy, Energy Transfer, and General Energy Analysis: Thermodynamics: An Engineering ApproachDocument32 pagesEnergy, Energy Transfer, and General Energy Analysis: Thermodynamics: An Engineering ApproachMuhammad Awais khanNo ratings yet
- Shafts: Standard Sizes of ShaftsDocument9 pagesShafts: Standard Sizes of ShaftssyampnaiduNo ratings yet
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- Scrubbing Line PaperDocument8 pagesScrubbing Line PaperAndiNo ratings yet
- Power Units and TransmissionDocument42 pagesPower Units and TransmissionAmarjeet RaiNo ratings yet
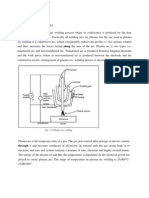
- MOdern Welding ProcessesDocument25 pagesMOdern Welding ProcessesAnwar Sadath M A50% (2)
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- BeltDocument58 pagesBeltWilson Lim100% (1)
- Belt PDFDocument58 pagesBelt PDFsharifahNo ratings yet
- BNJ 20303 Chapter 1-Belt Drive SystemDocument24 pagesBNJ 20303 Chapter 1-Belt Drive SystemMd EliasNo ratings yet
- Acoustic Measurements: M. Vorl AnderDocument31 pagesAcoustic Measurements: M. Vorl AnderDanielRaoNo ratings yet
- Chapter 5-MechanismDocument28 pagesChapter 5-MechanismDanielRaoNo ratings yet
- Chapter 4-FrictionDocument32 pagesChapter 4-FrictionDanielRao100% (1)
- Chapter 1-Gear SystemDocument27 pagesChapter 1-Gear SystemDanielRao100% (2)
- Ice Breaker : Find The Books of The BibleDocument6 pagesIce Breaker : Find The Books of The BibleDanielRaoNo ratings yet
- Kl/kajang Trip (3 Days 2 Nights) 02/12/16-04/12/16 First Day (02/12/2016)Document1 pageKl/kajang Trip (3 Days 2 Nights) 02/12/16-04/12/16 First Day (02/12/2016)DanielRaoNo ratings yet
- Chapter 3-BalancingDocument29 pagesChapter 3-BalancingDanielRaoNo ratings yet
- Course Description (MESB323) - PremDocument10 pagesCourse Description (MESB323) - PremDanielRaoNo ratings yet
- Section 11Document5 pagesSection 11DanielRaoNo ratings yet
- Exercise Chapter 2Document1 pageExercise Chapter 2AcapSuiNo ratings yet
- Internal Rate of Return (IRR) Analysis: Lecture No. 24 Contemporary Engineering EconomicsDocument22 pagesInternal Rate of Return (IRR) Analysis: Lecture No. 24 Contemporary Engineering EconomicsDanielRaoNo ratings yet
- MEMB322 Mechanical Design Process: Mini Project Complex Engineering Problem StatementDocument1 pageMEMB322 Mechanical Design Process: Mini Project Complex Engineering Problem StatementDanielRaoNo ratings yet
- Introduction of Wafer Surface Grinding Machine Model GCG300Document6 pagesIntroduction of Wafer Surface Grinding Machine Model GCG300DanielRaoNo ratings yet
- WelcomeDocument1 pageWelcomeDanielRaoNo ratings yet
- Univers AL: Cylindri CALDocument11 pagesUnivers AL: Cylindri CALDanielRaoNo ratings yet
- Report Cad CamDocument14 pagesReport Cad CamDanielRaoNo ratings yet
- Strength of Material 1 - Hooke S Law Tensile Test EdDocument22 pagesStrength of Material 1 - Hooke S Law Tensile Test EdDanielRaoNo ratings yet
- Especificaciones Panel LG LM220 PDFDocument31 pagesEspecificaciones Panel LG LM220 PDFRaul AlfaroNo ratings yet
- Ac DCDocument3 pagesAc DCSachin NowalNo ratings yet
- ITS America's 2009 Annual Meeting & Exposition: Preliminary ProgramDocument36 pagesITS America's 2009 Annual Meeting & Exposition: Preliminary ProgramITS AmericaNo ratings yet
- Flow Characteristics at The Pump-Turbine Interface of A Torque Converter at Extreme Speed RatiosDocument9 pagesFlow Characteristics at The Pump-Turbine Interface of A Torque Converter at Extreme Speed RatiosanupthattaNo ratings yet
- Transmission LinesDocument60 pagesTransmission LinesChenette Ahorro FerrerNo ratings yet
- GRWBookDocument56 pagesGRWBookjayandbob90% (10)
- CV - Sujal ShahDocument7 pagesCV - Sujal Shahbhavin_civilNo ratings yet
- Chemistry Investigatory Project 12th GradeDocument14 pagesChemistry Investigatory Project 12th GradeSham BristosNo ratings yet
- Fracture Mechanics HandbookDocument27 pagesFracture Mechanics Handbooksathya86online0% (1)
- OG 100 PSA ManualDocument52 pagesOG 100 PSA ManualdiengovNo ratings yet
- Ch2Document34 pagesCh2papipapiiNo ratings yet
- Thermoplastic Elastomeric (Tpe) Materials and PDFDocument16 pagesThermoplastic Elastomeric (Tpe) Materials and PDFcesamavNo ratings yet
- Design Calculations For Sludge Holding Tank-R1!08!05-15Document67 pagesDesign Calculations For Sludge Holding Tank-R1!08!05-15Rajagopal GanapathyNo ratings yet
- Contactor CatalogueDocument22 pagesContactor CatalogueRoqueo RDNo ratings yet
- Flame Scanner Info Folder 261A1812P012Document16 pagesFlame Scanner Info Folder 261A1812P012foroNo ratings yet
- Long Distance Bulk Power Transmission in Both UHVAC and UHVDCDocument15 pagesLong Distance Bulk Power Transmission in Both UHVAC and UHVDCAnonymous NGXdt2BxNo ratings yet
- DBGVC 433-1DW: ModelDocument2 pagesDBGVC 433-1DW: ModelMiguel RojasNo ratings yet
- Milano The New School For Management and Urban Policy / Alumni Newsletter Fall 2010Document8 pagesMilano The New School For Management and Urban Policy / Alumni Newsletter Fall 2010The New SchoolNo ratings yet
- ALM 30&32 BrochureDocument4 pagesALM 30&32 BrochureUlhas VajreNo ratings yet
- QFD: House of Quality: CorrelationsDocument1 pageQFD: House of Quality: CorrelationsTest UserNo ratings yet
- Kvantna MehanikaDocument5 pagesKvantna MehanikaKurt CargoNo ratings yet
- Substation Online Partial Discharge Testing (OLPD) Testing Tech. Update and InfoDocument11 pagesSubstation Online Partial Discharge Testing (OLPD) Testing Tech. Update and InfoTrebor SantosNo ratings yet
- SBS5312 1718 04-Indoor Lighting DesignDocument54 pagesSBS5312 1718 04-Indoor Lighting DesignKhaled BellegdyNo ratings yet
- Antisurge Control SystemDocument10 pagesAntisurge Control Systemlac1981No ratings yet
- 6.2 - Energy and Voltage in Circuits 1p - Edexcel Igcse Physics QPDocument14 pages6.2 - Energy and Voltage in Circuits 1p - Edexcel Igcse Physics QPAng HHNo ratings yet
- M070033 XgardIQ Oxygen Sensor Module Iss 1 Sept 15Document2 pagesM070033 XgardIQ Oxygen Sensor Module Iss 1 Sept 15AniigiselaNo ratings yet
- FM 5 Bernoulli and Energy EquationsDocument47 pagesFM 5 Bernoulli and Energy Equationsالياس يونس مرغلانيNo ratings yet
- Continuously Variable Transmission (CVT) : Group 23Document12 pagesContinuously Variable Transmission (CVT) : Group 2308088338100% (1)