You might also like
- GNSS Positioning MethodsDocument46 pagesGNSS Positioning MethodsVlaire Janrex LondoñoNo ratings yet
- Coordinate Systems & Map Projection ExplainedDocument41 pagesCoordinate Systems & Map Projection ExplainedPrasanna Naik100% (1)
- GPS (Global Positioning System) & DGPS (Differential Global Positioning System)Document103 pagesGPS (Global Positioning System) & DGPS (Differential Global Positioning System)NoCopyrightTunesNo ratings yet
- What Is A Coordinate System?Document6 pagesWhat Is A Coordinate System?EMINAT PRINCE100% (1)
- Presentation 2Document53 pagesPresentation 2Sherin KollakkodanNo ratings yet
- Map Projections ExplainedDocument17 pagesMap Projections ExplainedMelisa AyuningtyasNo ratings yet
- GeodesyDocument11 pagesGeodesystevenspillkumarNo ratings yet
- Chapter10 Spherical Triangle For GCDocument3 pagesChapter10 Spherical Triangle For GCAmit Kumar SenNo ratings yet
- Terrestrial Reference System and FrameDocument34 pagesTerrestrial Reference System and FrameArga Fondra OksapingNo ratings yet
- Global Positioning System (GPS) : Satellite-Based Positioning SystemsDocument33 pagesGlobal Positioning System (GPS) : Satellite-Based Positioning SystemsIli AisyahNo ratings yet
- Azimuth Determination of A Line by Observation of The Sun at Equal AltitudeDocument4 pagesAzimuth Determination of A Line by Observation of The Sun at Equal AltitudemarkyNo ratings yet
- Lecture 5 6Document97 pagesLecture 5 6Tech StarNo ratings yet
- Chapter 2 - Geodesy and Datums in NavigationDocument7 pagesChapter 2 - Geodesy and Datums in NavigationBashir Kharal100% (1)
- Stonex Sts Total Station ManualDocument237 pagesStonex Sts Total Station Manualvadi_hatwar67% (3)
- Coordinate Systems in GeodesyDocument126 pagesCoordinate Systems in GeodesyÖmer GedikNo ratings yet
- Notes On Satellite Navigation System-1Document11 pagesNotes On Satellite Navigation System-1Md Monir HossainNo ratings yet
- Photogrammetric Map CompilationDocument13 pagesPhotogrammetric Map CompilationLuis Flores Blanco100% (1)
- Rule of TwelvesDocument1 pageRule of TwelvesrickiNo ratings yet
- Taller UTM 2020Document65 pagesTaller UTM 2020joseNo ratings yet
- Aerial Photography and PhotogrammetryDocument41 pagesAerial Photography and PhotogrammetryArham SheikhNo ratings yet
- Introduction to the Fundamentals of GeodesyDocument27 pagesIntroduction to the Fundamentals of Geodesyrishav baishyaNo ratings yet
- 2 - GeodesyDocument28 pages2 - GeodesyReynaldo AldamarNo ratings yet
- Aerial Photogrammetry: Presented by Scholar NoDocument34 pagesAerial Photogrammetry: Presented by Scholar Norajat pandeyNo ratings yet
- Cartography-Search 2018 PDFDocument45 pagesCartography-Search 2018 PDFArnaldoNo ratings yet
- Gravimetry Is The Measurement of The Strength of A Gravitational FieldDocument30 pagesGravimetry Is The Measurement of The Strength of A Gravitational FieldMahaManthraNo ratings yet
- Gyroscopic Motion Presentation GCUFDocument15 pagesGyroscopic Motion Presentation GCUFAhmad ChNo ratings yet
- Map Projections IIDocument139 pagesMap Projections IIMeire SchmidtNo ratings yet
- CAP Regulation 52-16 - 04/01/2003Document30 pagesCAP Regulation 52-16 - 04/01/2003CAP History LibraryNo ratings yet
- DGPS Stations in IndiaDocument13 pagesDGPS Stations in IndiamhegdenNo ratings yet
- Assignment - 1Document21 pagesAssignment - 1shoyeb ahmedNo ratings yet
- GNSS: Global Navigation Satellite Systems GuideDocument39 pagesGNSS: Global Navigation Satellite Systems GuideEdi KazuoNo ratings yet
- Basic Concept of GPSDocument6 pagesBasic Concept of GPSnehaaneesNo ratings yet
- Lecture16 Unlocked PDFDocument16 pagesLecture16 Unlocked PDFTech StarNo ratings yet
- Digital Soil Map of the WorldDocument1 pageDigital Soil Map of the WorldLenny Caruajulca Salazar100% (1)
- Principles of GPS 4-13-04Document54 pagesPrinciples of GPS 4-13-04GenNo ratings yet
- Software Seismik Refraksi Dan ReflaksiDocument29 pagesSoftware Seismik Refraksi Dan Reflaksihendri sulistiawanNo ratings yet
- Tidal Force Calculator - High Accuracy CalculationDocument3 pagesTidal Force Calculator - High Accuracy CalculationNeptuneBeatzHD0% (1)
- Geologic Mapping Template EssentialsDocument13 pagesGeologic Mapping Template EssentialsNormand AlbertoNo ratings yet
- Satellite Navigation Systems ExplainedDocument144 pagesSatellite Navigation Systems ExplainedEreN100% (1)
- Conical Equal Area Projection With Two Standard ParallelsDocument18 pagesConical Equal Area Projection With Two Standard ParallelsBiki Kundu100% (1)
- Modern Survey TechniquesDocument15 pagesModern Survey TechniquesNishant DasNo ratings yet
- Geodetic Datum 1Document39 pagesGeodetic Datum 1Arga Fondra OksapingNo ratings yet
- Adjust CDocument133 pagesAdjust CFelipe Carvajal Rodríguez100% (1)
- Coordinate System and TraversDocument25 pagesCoordinate System and TraversAhmad Khaled100% (1)
- Exercise1 2016Document2 pagesExercise1 2016JadNo ratings yet
- Celestial Coordinate SystemsDocument31 pagesCelestial Coordinate SystemsAce OrolfoNo ratings yet
- M-13 Chapter 2Document86 pagesM-13 Chapter 2Cherinet Sam100% (1)
- Quadrantal Spherical TrianglesDocument2 pagesQuadrantal Spherical TrianglesFebelyn TapicNo ratings yet
- 5 Charts ProjectionDocument44 pages5 Charts ProjectionDaniel England100% (1)
- Cartography PDFDocument20 pagesCartography PDFPoojaNo ratings yet
- Spatial Referencing in GISDocument69 pagesSpatial Referencing in GISMIGUELNo ratings yet
- Concept of Coordinate Systems and Map ProjectionsDocument65 pagesConcept of Coordinate Systems and Map ProjectionshabteNo ratings yet
- MapprojDocument57 pagesMapprojsaifNo ratings yet
- Geodesy and Map ProjectionsDocument46 pagesGeodesy and Map ProjectionsJavier Gismero100% (1)
- Types of Coordinate Systems: - (1) Global Cartesian - (2) Geographic - (3) ProjectedDocument12 pagesTypes of Coordinate Systems: - (1) Global Cartesian - (2) Geographic - (3) ProjectedWassan IdreesNo ratings yet
- Geodesy FundamentalsDocument61 pagesGeodesy FundamentalsPrasanna NaikNo ratings yet
- Geodesy, Map Projections and Coordinate SystemsDocument54 pagesGeodesy, Map Projections and Coordinate SystemsSolai NathanNo ratings yet
- CENG528-2-Projections Geodesy and Coordinate SystemsDocument49 pagesCENG528-2-Projections Geodesy and Coordinate SystemsdrdahmanNo ratings yet
- Map, Projections, Coordinate Systems & Datums: - OverviewDocument91 pagesMap, Projections, Coordinate Systems & Datums: - OverviewMok Wai KhengNo ratings yet
- Lect - Course Information-SUG559Document11 pagesLect - Course Information-SUG559Farisa ZulkifliNo ratings yet
- Lect 4-Cadastral Survey ControlDocument40 pagesLect 4-Cadastral Survey ControlFarisa ZulkifliNo ratings yet
- Lect 2-Terminology in E-CadastralDocument45 pagesLect 2-Terminology in E-CadastralFarisa ZulkifliNo ratings yet
- Lect11 - Marine CadastralDocument52 pagesLect11 - Marine CadastralFarisa ZulkifliNo ratings yet
- Lect 1b - Cadastral SUMDocument24 pagesLect 1b - Cadastral SUMFarisa ZulkifliNo ratings yet
- L6 Sug532 PhyGeodDocument14 pagesL6 Sug532 PhyGeodFarisa ZulkifliNo ratings yet
- SUG559 Advanced Cadastral SurveyingDocument37 pagesSUG559 Advanced Cadastral SurveyingFarisa ZulkifliNo ratings yet
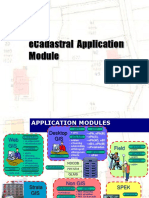
- eCadastral Application ModulesDocument22 pageseCadastral Application ModulesFarisa ZulkifliNo ratings yet
- L3 Sug532 PhyGeodDocument10 pagesL3 Sug532 PhyGeodFarisa ZulkifliNo ratings yet
- SUG614-Chapter 1a - POsitioining2 PDFDocument132 pagesSUG614-Chapter 1a - POsitioining2 PDFFarisa ZulkifliNo ratings yet
- L2 Sug532 PhyGeodDocument6 pagesL2 Sug532 PhyGeodFarisa ZulkifliNo ratings yet
- Lil'lilh ::'jxffiffi53"#"ments:: Glol l0 STDocument6 pagesLil'lilh ::'jxffiffi53"#"ments:: Glol l0 STFarisa ZulkifliNo ratings yet
- The Fundamental Equation of Physical GeodesyDocument6 pagesThe Fundamental Equation of Physical GeodesyFarisa ZulkifliNo ratings yet
- L1 SUG532 SyllabusDocument3 pagesL1 SUG532 SyllabusFarisa ZulkifliNo ratings yet
- Tidal Levels and Datums ExplainedDocument57 pagesTidal Levels and Datums ExplainedFarisa Zulkifli100% (1)
- Report FullDocument67 pagesReport FullFarisa ZulkifliNo ratings yet
- Tidal Levels and Datums ExplainedDocument57 pagesTidal Levels and Datums ExplainedFarisa Zulkifli100% (1)
- Assignment 20201Document1 pageAssignment 20201Farisa ZulkifliNo ratings yet
- SUG614-Chapter 2 - Sounding PDFDocument106 pagesSUG614-Chapter 2 - Sounding PDFFarisa ZulkifliNo ratings yet
- Assignment 20201Document1 pageAssignment 20201Farisa ZulkifliNo ratings yet
- SUG614-Chapter 1a - POsitioining2 PDFDocument132 pagesSUG614-Chapter 1a - POsitioining2 PDFFarisa ZulkifliNo ratings yet
- SUG614-Chapter 1b - Underwater Positioning System PDFDocument25 pagesSUG614-Chapter 1b - Underwater Positioning System PDFFarisa ZulkifliNo ratings yet
- Assignment 20201Document1 pageAssignment 20201Farisa ZulkifliNo ratings yet
- Assignment 20201Document1 pageAssignment 20201Farisa ZulkifliNo ratings yet
- Chapter 2a - Terminology in CadastDocument4 pagesChapter 2a - Terminology in CadastFarisa ZulkifliNo ratings yet
- Assignment 20201Document1 pageAssignment 20201Farisa ZulkifliNo ratings yet
- Chapter 2 - Terminology in Cadastral SurveyingDocument32 pagesChapter 2 - Terminology in Cadastral SurveyingFarisa ZulkifliNo ratings yet
- Chapter 1-Type of Cadastral Surveying PDFDocument10 pagesChapter 1-Type of Cadastral Surveying PDFFarisa ZulkifliNo ratings yet
- Chapter 1-INTRO CADASTRAL SURVEYING PDFDocument45 pagesChapter 1-INTRO CADASTRAL SURVEYING PDFFarisa Zulkifli100% (4)
- 4 Geodesy 1 RDocument50 pages4 Geodesy 1 RHernan CordobaNo ratings yet
- Geological Mapping of Jharia Coalfield, India Using GRACE EGM2008 Gravity Data A Vertical Derivative ApproachDocument15 pagesGeological Mapping of Jharia Coalfield, India Using GRACE EGM2008 Gravity Data A Vertical Derivative ApproachSanjit Pal100% (1)
- Topographic Map of Hebbronville NWDocument1 pageTopographic Map of Hebbronville NWHistoricalMapsNo ratings yet
- MongoDB Indexes GuideDocument68 pagesMongoDB Indexes Guidelokeshgupta15No ratings yet
- Spatial DataDocument3 pagesSpatial DataN_mNo ratings yet
- Brown and Sharpe CMM 2 0Document11 pagesBrown and Sharpe CMM 2 0api-311988244No ratings yet
- PS1 - General Survey RequirementsDocument50 pagesPS1 - General Survey RequirementsHo Kok GanNo ratings yet
- A New Geodetic Infrastructure For Trinidad and TobagoDocument13 pagesA New Geodetic Infrastructure For Trinidad and TobagoSilburn_Clarke_8972100% (1)
- Tunnel 05 - Construction of Tunnels - Part 2Document65 pagesTunnel 05 - Construction of Tunnels - Part 2Andika Febrian0% (1)
- Company Profile PT. Reka Bumi ConsultingDocument10 pagesCompany Profile PT. Reka Bumi ConsultingGeuListore100% (1)
- HyperGraph 2DDocument378 pagesHyperGraph 2DSantiago UrgilesNo ratings yet
- Why Build MasterDocument2 pagesWhy Build MasterAHSANNo ratings yet
- Profile of A Surface: Size, Form and OrientationDocument5 pagesProfile of A Surface: Size, Form and Orientationgthulasi787126No ratings yet
- SUG/GLS456 Geodesy: Ppsug, Fspu, Uitm, Shah Alam Assoc. Prof. Sr. Dr. Azman Bin Mohd. Suldi (Mrics, Mrism)Document28 pagesSUG/GLS456 Geodesy: Ppsug, Fspu, Uitm, Shah Alam Assoc. Prof. Sr. Dr. Azman Bin Mohd. Suldi (Mrics, Mrism)najmiNo ratings yet
- Benchmarking Project Update - Loading Efficiency - 240818Document22 pagesBenchmarking Project Update - Loading Efficiency - 240818Sunny SouravNo ratings yet
- LandStar7 Manual 0912Document105 pagesLandStar7 Manual 0912yekangNo ratings yet
- Kuliah 3 - Coordinate System - Map ProjectionDocument33 pagesKuliah 3 - Coordinate System - Map ProjectionKevin aryaNo ratings yet
- Manual Del Stereonet - GeomechanicsDocument25 pagesManual Del Stereonet - GeomechanicsDavid GarciaNo ratings yet
- Topographic Map of MacdonaDocument1 pageTopographic Map of MacdonaHistoricalMapsNo ratings yet
- Analysis Spatial Using ILWISDocument37 pagesAnalysis Spatial Using ILWISAsri Lionel RenggoNo ratings yet
- RW 17Document130 pagesRW 17wdtalampasNo ratings yet
- Manual Instructions For SAP Note 1991058: EFD Fiscal - Block KDocument23 pagesManual Instructions For SAP Note 1991058: EFD Fiscal - Block KleociprianoNo ratings yet
- Background:: Guidelines For Implementing National Map PolicyDocument9 pagesBackground:: Guidelines For Implementing National Map PolicyLZZNo ratings yet
- Abidjan 1987 UTM zone 30N CRSDocument4 pagesAbidjan 1987 UTM zone 30N CRSAhmedOuryJallohNo ratings yet
- Topographic Map of ShermanDocument1 pageTopographic Map of ShermanHistoricalMaps100% (1)
- Em408 UgDocument14 pagesEm408 UgQuentin LambertNo ratings yet
- Levelling PPT 1Document14 pagesLevelling PPT 1Nandini Anand100% (1)
- Conversion Program For 168 Infotype - SAP HR ABAPDocument5 pagesConversion Program For 168 Infotype - SAP HR ABAPNaha RajNo ratings yet
- Topic 2.2 Geoid and EllipsoidDocument14 pagesTopic 2.2 Geoid and EllipsoidKenneth BallonNo ratings yet
- Coast Pilot 5 - 42nd Edition (2014) - Gulf of Mexico, Puerto Rico and Virgin IslandsDocument608 pagesCoast Pilot 5 - 42nd Edition (2014) - Gulf of Mexico, Puerto Rico and Virgin IslandssperlingreichNo ratings yet