You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Tutorial On Compressive SensingDocument83 pagesA Tutorial On Compressive SensingoveiskntuNo ratings yet
- (Elearnica - Ir) - Synchronization Techniques For A Frequency-Hopped Wireless Transceiver PDFDocument5 pages(Elearnica - Ir) - Synchronization Techniques For A Frequency-Hopped Wireless Transceiver PDFoveiskntuNo ratings yet
- ML-based Frequency Estimation and Synchronization of Frequency Hopping SignDocument8 pagesML-based Frequency Estimation and Synchronization of Frequency Hopping SignoveiskntuNo ratings yet
- Super-Resolution Time Delay Estimation For Narrowband SignalDocument7 pagesSuper-Resolution Time Delay Estimation For Narrowband SignaloveiskntuNo ratings yet
- Synthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionDocument6 pagesSynthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionoveiskntuNo ratings yet
- Lightweight Low-Power Coarse Star TrackerDocument8 pagesLightweight Low-Power Coarse Star TrackeroveiskntuNo ratings yet
- (Djalil Chafaï and Olivier Guédon and Guillaume PDFDocument163 pages(Djalil Chafaï and Olivier Guédon and Guillaume PDFoveiskntuNo ratings yet
- An Introduction To Sparse Coding, Sparse SensingDocument37 pagesAn Introduction To Sparse Coding, Sparse SensingoveiskntuNo ratings yet
- DSP Kertaus enDocument8 pagesDSP Kertaus enThirrunavukkarasu R RNo ratings yet
- Ece562 Channel Modeling SlidesDocument40 pagesEce562 Channel Modeling SlidesoveiskntuNo ratings yet
- Fast ConvDocument7 pagesFast ConvoveiskntuNo ratings yet
- Chapter 5 Optimal ReceiverDocument53 pagesChapter 5 Optimal ReceiveroveiskntuNo ratings yet
- More On Wireless Ethernet, Token Ring, FDDIDocument25 pagesMore On Wireless Ethernet, Token Ring, FDDIoveiskntuNo ratings yet
- Binary Maximal-Ratio CombiningDocument6 pagesBinary Maximal-Ratio CombiningoveiskntuNo ratings yet
- Optimum Reception in Additive White GaussianNoise (AWGN)Document74 pagesOptimum Reception in Additive White GaussianNoise (AWGN)gau_loncon1511No ratings yet
- Mimo OfdmDocument7 pagesMimo OfdmTahir SiddiquiNo ratings yet
- Signal Processing and CommunicationsDocument38 pagesSignal Processing and CommunicationsoveiskntuNo ratings yet
- An Evaluation of Architecture For Ims Based Video Conferencing University of CapetownDocument6 pagesAn Evaluation of Architecture For Ims Based Video Conferencing University of CapetownoveiskntuNo ratings yet
- Ergodic NotesDocument115 pagesErgodic NotesoveiskntuNo ratings yet
- Fractal Traffic Models For Internet SimulationDocument7 pagesFractal Traffic Models For Internet SimulationoveiskntuNo ratings yet
- SIP IMSmodel PDFDocument4 pagesSIP IMSmodel PDFoveiskntuNo ratings yet
- Fin Ali Information Related Seminar 29june11Document1 pageFin Ali Information Related Seminar 29june11oveiskntuNo ratings yet
- Using VMDK File To Create A VM in VMwarePlayer - WindowsDocument35 pagesUsing VMDK File To Create A VM in VMwarePlayer - WindowsTitis NovidwikartikaNo ratings yet
- Architecture For Mobility and QoS Support in All-IP Wireless NetworksDocument15 pagesArchitecture For Mobility and QoS Support in All-IP Wireless NetworksoveiskntuNo ratings yet
- Automated Modeling and Practical Applications of Systems Described by The AggregatesDocument6 pagesAutomated Modeling and Practical Applications of Systems Described by The AggregatesoveiskntuNo ratings yet
- Performance Evaluation of SIP-based Session Establishment Over Satellite-UMTSDocument5 pagesPerformance Evaluation of SIP-based Session Establishment Over Satellite-UMTSoveiskntuNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Python Lab10 Report SummaryDocument8 pagesPython Lab10 Report SummaryVivekananda ParamahamsaNo ratings yet
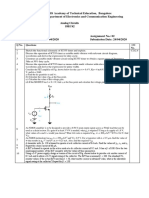
- Q No. Questions CO No.: C C W That Results in GDocument2 pagesQ No. Questions CO No.: C C W That Results in GSamarth SamaNo ratings yet
- Masonry: Department of EducationDocument6 pagesMasonry: Department of EducationFatima AdilNo ratings yet
- Least Used ProtocolsDocument3 pagesLeast Used ProtocolsJohn Britto0% (1)
- ENG18Document2 pagesENG18Lef RJNo ratings yet
- PAL-AT Operating ManualDocument60 pagesPAL-AT Operating ManualArmağan DemirelNo ratings yet
- SEBI Circular On Online Processing of Investor Service Requests and Complaints by RTAs - June 8, 2023Document5 pagesSEBI Circular On Online Processing of Investor Service Requests and Complaints by RTAs - June 8, 2023Diya PandeNo ratings yet
- Skott Marsi Art Basel Sponsorship DeckDocument11 pagesSkott Marsi Art Basel Sponsorship DeckANTHONY JACQUETTENo ratings yet
- Afirstlook PPT 11 22Document20 pagesAfirstlook PPT 11 22nickpho21No ratings yet
- Assignment 1technoDocument3 pagesAssignment 1technonadiyaxxNo ratings yet
- V3 Hyundai Price ListDocument4 pagesV3 Hyundai Price Listdeepu kumarNo ratings yet
- Assessment Task 2 2Document10 pagesAssessment Task 2 2Pratistha GautamNo ratings yet
- Project On SpicesDocument96 pagesProject On Spicesamitmanisha50% (6)
- LECTURE 11-Microalgal Biotechnology-Biofuels N BioproductsDocument16 pagesLECTURE 11-Microalgal Biotechnology-Biofuels N BioproductsIntan Lestari DewiNo ratings yet
- Aclj Executed-Petition 20100804Document14 pagesAclj Executed-Petition 20100804Elizabeth BenjaminNo ratings yet
- Solve A Second-Order Differential Equation Numerically - MATLAB SimulinkDocument2 pagesSolve A Second-Order Differential Equation Numerically - MATLAB Simulinkmohammedshaiban000No ratings yet
- IoscanDocument3 pagesIoscanTimNo ratings yet
- Bangladesh PoliceDocument17 pagesBangladesh PoliceCpsMinhazulIslamNo ratings yet
- Sop Welder TigDocument2 pagesSop Welder TigShahid RazaNo ratings yet
- Satyam GargDocument2 pagesSatyam GargSatyam GargNo ratings yet
- TechRef SoftstarterDocument11 pagesTechRef SoftstarterCesarNo ratings yet
- Case Study-Hain Celestial: Student Name Institution Affiliation DateDocument5 pagesCase Study-Hain Celestial: Student Name Institution Affiliation DategeofreyNo ratings yet
- Developing IT Security Risk Management PlanDocument5 pagesDeveloping IT Security Risk Management PlanKefa Rabah100% (3)
- Metric Tables 2012Document2 pagesMetric Tables 2012ParthJainNo ratings yet
- Consumer Behaviour-Kiran GDocument9 pagesConsumer Behaviour-Kiran GVaibhav KhandelwalNo ratings yet
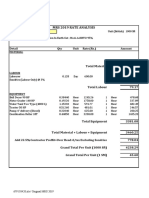
- Technical Sheet Azud Watertech WW EngDocument2 pagesTechnical Sheet Azud Watertech WW EngMiguel Torres ObrequeNo ratings yet
- Subgrade Preparation in Earth CutDocument3 pagesSubgrade Preparation in Earth Cutusama buttNo ratings yet
- Human Behavior in OrganizationDocument85 pagesHuman Behavior in OrganizationNeric Ico Magleo100% (1)
- Right To Self OrganizationDocument7 pagesRight To Self OrganizationSALMAN JOHAYRNo ratings yet
- BBA - Study On Gold As A Safer Investment CommodityDocument94 pagesBBA - Study On Gold As A Safer Investment CommoditySANJU GNo ratings yet