You might also like
- IELTS Practice Materials Academic TestDocument58 pagesIELTS Practice Materials Academic TestYoradyl Tumusok Plando100% (1)
- Copia de ISLMDocument16 pagesCopia de ISLMcristianmondacaNo ratings yet
- Abadleh 2021Document10 pagesAbadleh 2021Yuyun SetyawatiNo ratings yet
- ReportDocument27 pagesReportgamer GamesloverNo ratings yet
- Step Counter MADDocument5 pagesStep Counter MADNilesh ChavanNo ratings yet
- Sensors: Using Smart Phone Sensors To Detect Transportation ModesDocument23 pagesSensors: Using Smart Phone Sensors To Detect Transportation Modesilie_vlassaNo ratings yet
- Classifying Human Activity from On-Body AccelerometersDocument18 pagesClassifying Human Activity from On-Body AccelerometersElvis HuvNo ratings yet
- Walk CompassDocument14 pagesWalk CompasstaccountidNo ratings yet
- A Real-Time Pothole Detection Approach For IntelliDocument7 pagesA Real-Time Pothole Detection Approach For IntelliMohitNo ratings yet
- Sensors: A Cooperative Machine Learning Approach For Pedestrian Navigation in Indoor IotDocument24 pagesSensors: A Cooperative Machine Learning Approach For Pedestrian Navigation in Indoor Iotathar shahzadNo ratings yet
- Modelling The Effect of Driving Events On ElectricDocument24 pagesModelling The Effect of Driving Events On ElectricAhmet YüceNo ratings yet
- Sensors: Inertial Sensor-Based Gait Recognition: A ReviewDocument39 pagesSensors: Inertial Sensor-Based Gait Recognition: A ReviewCarlos MuñozNo ratings yet
- Alotaibi 2020Document12 pagesAlotaibi 2020Santhana KrishnanNo ratings yet
- Activity RecognitionDocument14 pagesActivity RecognitionSarmistha NandaNo ratings yet
- Souza 2018Document14 pagesSouza 2018Tenzing ThileyNo ratings yet
- IMPORTANT - Traffic Sensing Through AccelerometersDocument9 pagesIMPORTANT - Traffic Sensing Through Accelerometersvarunsingh214761No ratings yet
- 3D Human Gait Reconstruction and Monitoring Using Body-Worn Inertial Sensors and Kinematic ModelingDocument9 pages3D Human Gait Reconstruction and Monitoring Using Body-Worn Inertial Sensors and Kinematic ModelingCristian HoyNo ratings yet
- E04342730 Project PDFDocument4 pagesE04342730 Project PDFAbhay JangirNo ratings yet
- Paper Mobile Hci 2010Document2 pagesPaper Mobile Hci 2010Air WalkietalkieNo ratings yet
- Document Digital TheraphyDocument28 pagesDocument Digital TheraphyThe MindNo ratings yet
- Image-Based Gramian Angular Field Processing For Pedestrian Stride-Length Estimation Using Convolutional Neural NetworkDocument12 pagesImage-Based Gramian Angular Field Processing For Pedestrian Stride-Length Estimation Using Convolutional Neural NetworkIAES IJAINo ratings yet
- Electronics 08 00894Document15 pagesElectronics 08 00894Preeja BabuNo ratings yet
- Robusthuman 2017Document22 pagesRobusthuman 2017sushanprazNo ratings yet
- Accelero Placement RefDocument6 pagesAccelero Placement RefBoulvard depoNo ratings yet
- Sensors: Gait Measurement System For The Multi-Target Stepping Task Using A Laser Range SensorDocument18 pagesSensors: Gait Measurement System For The Multi-Target Stepping Task Using A Laser Range SensorWelly DiasNo ratings yet
- Libby Peak DetectionDocument16 pagesLibby Peak DetectionwisesoarNo ratings yet
- A Low-Cost Calibration Method For Low-Cost MEMS AcDocument19 pagesA Low-Cost Calibration Method For Low-Cost MEMS AcAerojet Rocketdyne RS-25No ratings yet
- Jurnal Wahyu AffandiDocument7 pagesJurnal Wahyu AffandiWahyu AffandiNo ratings yet
- Gait RecognitionDocument4 pagesGait RecognitionManoj BojjaNo ratings yet
- Answers 5 QuestionsDocument4 pagesAnswers 5 QuestionsMesba HoqueNo ratings yet
- Accurate Indoor Positioning Using Learning Prediction SensorsDocument27 pagesAccurate Indoor Positioning Using Learning Prediction Sensorsvalerio modugnoNo ratings yet
- Seminar ReportthameemDocument30 pagesSeminar ReportthameemThameem Ibnu MuhammedaliNo ratings yet
- Electronics: Assessment of A Smart Sensing Shoe For Gait Phase Detection in Level WalkingDocument15 pagesElectronics: Assessment of A Smart Sensing Shoe For Gait Phase Detection in Level WalkingFinaz JamilNo ratings yet
- Sensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman FilterDocument22 pagesSensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman Filterxyz shahNo ratings yet
- Recognizing User Context Using MobileDocument5 pagesRecognizing User Context Using MobileAshwin Kishor BangarNo ratings yet
- Hindle 2021 IMUDocument14 pagesHindle 2021 IMUAFoqsdifNo ratings yet
- Assessing The Influence of Spatio-Temporal Context For Next Place Prediction Using Different Machine Learning ApproachesDocument24 pagesAssessing The Influence of Spatio-Temporal Context For Next Place Prediction Using Different Machine Learning ApproachesΓιάννης ΜανουσαρίδηςNo ratings yet
- Analyzing Large Scale Human Mobility DatDocument23 pagesAnalyzing Large Scale Human Mobility DatzenusamriNo ratings yet
- Measurement MotionTrakkingDocument9 pagesMeasurement MotionTrakkingDiaz Ing ToretoNo ratings yet
- Real-Time Human Activity Recognition From Smart Phone Using Linear Support Vector MachinesDocument10 pagesReal-Time Human Activity Recognition From Smart Phone Using Linear Support Vector MachinesTELKOMNIKANo ratings yet
- Exploratory Data Analysis of Acceleration Signals To Select Light-Weight and Accurate Features For Real-Time Activity Recognition On SmartphonesDocument25 pagesExploratory Data Analysis of Acceleration Signals To Select Light-Weight and Accurate Features For Real-Time Activity Recognition On SmartphonesMo SaNo ratings yet
- Jocm (E)Document9 pagesJocm (E)Nguyễn Văn VũNo ratings yet
- Sensors 22 04898Document20 pagesSensors 22 04898alaa adienNo ratings yet
- Detection and Localization of Potholes in Roadways Using SmartphonesDocument7 pagesDetection and Localization of Potholes in Roadways Using SmartphonesB-15 Keyur BhanushaliNo ratings yet
- Sensors 21 05972 v2Document12 pagesSensors 21 05972 v2PODOSALUD HUANCAYONo ratings yet
- Detecting Potholes and Speed Breakers Using AndroidDocument4 pagesDetecting Potholes and Speed Breakers Using AndroidAnish ShahNo ratings yet
- Sensors: Energy-Efficient Collaborative Outdoor Localization For Participatory SensingDocument21 pagesSensors: Energy-Efficient Collaborative Outdoor Localization For Participatory SensingJayanth CRNo ratings yet
- Calculating Vehicle Speed Using Wireless SensorsDocument5 pagesCalculating Vehicle Speed Using Wireless SensorsHayderNo ratings yet
- Sensors: Cloud-Based Behavioral Monitoring in Smart HomesDocument16 pagesSensors: Cloud-Based Behavioral Monitoring in Smart HomestubdownloadNo ratings yet
- Zheng MEMS2016Document12 pagesZheng MEMS2016chaker AdrianoNo ratings yet
- A Method For Tracking Road ObjectsDocument15 pagesA Method For Tracking Road ObjectsIJMAJournalNo ratings yet
- Exploiting Accelerometers To Estimate Displacement PDFDocument5 pagesExploiting Accelerometers To Estimate Displacement PDFUmar ShahNo ratings yet
- Gesture-Controlled Questionnaires on WatchesDocument10 pagesGesture-Controlled Questionnaires on WatchesAjita LahaNo ratings yet
- Smartphones Based Mobile Mapping SystemsDocument6 pagesSmartphones Based Mobile Mapping SystemsBada SainathNo ratings yet
- Vmdjoo2016 Reload XltsDocument6 pagesVmdjoo2016 Reload XltsvictormocioiuNo ratings yet
- Human Pose Estimation Using Superpixels and SVM ClassifierDocument18 pagesHuman Pose Estimation Using Superpixels and SVM ClassifierNikitaNo ratings yet
- Gawad 2016Document5 pagesGawad 2016Bouzid Med KhaledNo ratings yet
- Integration of Force and IMU Sensors For Developing Low Cost Portable Gait Measurement System in Lower ExtremitiesDocument12 pagesIntegration of Force and IMU Sensors For Developing Low Cost Portable Gait Measurement System in Lower Extremitiesbiomedical bpiNo ratings yet
- Christopoulos Et Al. - 2019 - Learning Driver Braking Behavior Using SmartphonesDocument11 pagesChristopoulos Et Al. - 2019 - Learning Driver Braking Behavior Using SmartphonesN'GOLO MAMADOU KONENo ratings yet
- Sensors 14 08057 PDFDocument25 pagesSensors 14 08057 PDFTATAH DEVINE BERILIYNo ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- Sensors 15 25474 v3Document33 pagesSensors 15 25474 v3Oumaima OumaNo ratings yet
- Biodesign Second Edition: You'Ve Uploaded 0 of The 1 Required DocumentsDocument2 pagesBiodesign Second Edition: You'Ve Uploaded 0 of The 1 Required Documentsabhiken1994No ratings yet
- Manual Transmission System in AutomobilesDocument2 pagesManual Transmission System in Automobilesabhiken1994No ratings yet
- GOI IES Application Form 2018 2Document10 pagesGOI IES Application Form 2018 2vikas595No ratings yet
- Manual Transmission: Presented By:-Yash KenchgundiDocument3 pagesManual Transmission: Presented By:-Yash Kenchgundiabhiken1994No ratings yet
- Nvidia Geforce GT 1030 - Google SearchDocument2 pagesNvidia Geforce GT 1030 - Google Searchabhiken1994No ratings yet
- Evolution of Thrombectomy Approaches and DevicesDocument7 pagesEvolution of Thrombectomy Approaches and Devicesabhiken1994No ratings yet
- Abstract-Ischemic Stroke & Its TreatmentDocument1 pageAbstract-Ischemic Stroke & Its Treatmentabhiken1994No ratings yet
- RandomDocument1 pageRandomabhiken1994No ratings yet
- Abstract of ThesisDocument1 pageAbstract of Thesisabhiken1994No ratings yet
- Designing A Career in Biomedical EngineeringDocument18 pagesDesigning A Career in Biomedical EngineeringmedjacNo ratings yet
- Installing NotesDocument1 pageInstalling Notesabhiken1994No ratings yet
- Heat Transfer Intro-Chapter 1Document41 pagesHeat Transfer Intro-Chapter 1yaqoobNo ratings yet
- 000 N EE 0020003 Rev1 Acoustic Insulation SpecificationDocument18 pages000 N EE 0020003 Rev1 Acoustic Insulation Specificationonur gunesNo ratings yet
- Flight Simulation Final ReportDocument128 pagesFlight Simulation Final ReportRaksok Khankhampoch100% (1)
- Rectangular Tank Calculation Roarks FormulasDocument39 pagesRectangular Tank Calculation Roarks FormulasInamullah Khan100% (3)
- Fus and Wing Weight Estimation Ardema NASADocument94 pagesFus and Wing Weight Estimation Ardema NASAbfehrmNo ratings yet
- DFT QuestionsDocument8 pagesDFT QuestionsAdhi SuruliNo ratings yet
- Dissolving Cellulose from Different Sources in NaOH/UreaDocument11 pagesDissolving Cellulose from Different Sources in NaOH/Ureajitendra kumarNo ratings yet
- Parts List CMX1808Document36 pagesParts List CMX1808Jayden BarnesNo ratings yet
- LevofloxacinDocument2 pagesLevofloxacinNasir KhanNo ratings yet
- EECE 210 Electric Circuits Simple Resistive CircuitsDocument32 pagesEECE 210 Electric Circuits Simple Resistive CircuitsDaniaNo ratings yet
- Rishabh DC MeterDocument8 pagesRishabh DC MeterDeepikaNo ratings yet
- What Makes A Planet Habitable?Document3 pagesWhat Makes A Planet Habitable?Willie WilliowNo ratings yet
- Horizontal Axis Wind Turbines Passive Flow Control Methods: A ReviewDocument18 pagesHorizontal Axis Wind Turbines Passive Flow Control Methods: A ReviewHavaldar, SanjayNo ratings yet
- EC6802-Wireless Network Unit-1Document21 pagesEC6802-Wireless Network Unit-1Mprabha KaranNo ratings yet
- Mega - Operating Instructions PDFDocument12 pagesMega - Operating Instructions PDFAshish TIwariNo ratings yet
- Sequencing Catalog SupplementDocument10 pagesSequencing Catalog SupplementhassamjNo ratings yet
- Metering Devices IQ DP-4000: Cutler-HammerDocument4 pagesMetering Devices IQ DP-4000: Cutler-HammerArif KhanNo ratings yet
- ThinkServer TD350 - Product GuideDocument27 pagesThinkServer TD350 - Product GuideRaYa DiawNo ratings yet
- OLTC FailureDocument18 pagesOLTC FailurevtpsNo ratings yet
- Rate of Reaction Part 1Document19 pagesRate of Reaction Part 1danielphilip68No ratings yet
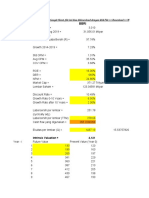
- Bagi Yang Masih Awam Memakai Google Sheet, File Ini Bisa Didownload Dengan Klik File Download MS. ExcelDocument67 pagesBagi Yang Masih Awam Memakai Google Sheet, File Ini Bisa Didownload Dengan Klik File Download MS. Excelwisnu pranata adhiNo ratings yet
- Lecture20 PDFDocument20 pagesLecture20 PDFkhitab12No ratings yet
- Exocytosis and Endocytosis: © 2012 Pearson Education, IncDocument49 pagesExocytosis and Endocytosis: © 2012 Pearson Education, IncGlein CenizaNo ratings yet
- Company Wise Data Science Interview QuestionsDocument39 pagesCompany Wise Data Science Interview QuestionschaddiNo ratings yet
- Indc CCP 432Document182 pagesIndc CCP 432SteveAbonyiNo ratings yet
- Making A Prallel Jaw Bar ClampDocument34 pagesMaking A Prallel Jaw Bar ClampHomayoon GeramifarNo ratings yet
- Mouna HezbriDocument106 pagesMouna HezbriMuhammedNo ratings yet
- GHDL Latest PDFDocument111 pagesGHDL Latest PDFArpanNo ratings yet
- Icc Esr 4143 (Hilt Hy 270)Document20 pagesIcc Esr 4143 (Hilt Hy 270)SACHINNo ratings yet