You might also like
- CAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitFrom EverandCAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitNo ratings yet
- CANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80Document33 pagesCANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80yogapost100% (4)
- Can-Bus Svel 02Document121 pagesCan-Bus Svel 02اشرينكيل مسونكيل100% (10)
- CAN Bus Interface Description CANbus Pin Out, and Signal Names. Controller ADocument8 pagesCAN Bus Interface Description CANbus Pin Out, and Signal Names. Controller AVincentius Nikim100% (1)
- Automotive Diag CAN NIDocument334 pagesAutomotive Diag CAN NIHector Sanchez100% (11)
- AUTOSAR SWS DiagnosticCommunicationManager PDFDocument553 pagesAUTOSAR SWS DiagnosticCommunicationManager PDFyuvarajnarayanasamyNo ratings yet
- Electric - 4 - M6-P1 - CAN BusDocument27 pagesElectric - 4 - M6-P1 - CAN Busjose breno vieira silva100% (3)
- Vehicle Network Toolbox - User GuideDocument494 pagesVehicle Network Toolbox - User Guideਰਾਜਬੀਰ100% (2)
- XCP ReferenceBook V1.0 ENDocument113 pagesXCP ReferenceBook V1.0 ENbriceagcosminNo ratings yet
- Diesel Common Rail Injection Electronic Components ExplainedFrom EverandDiesel Common Rail Injection Electronic Components ExplainedRating: 3.5 out of 5 stars3.5/5 (7)
- CAN ProtocolDocument63 pagesCAN ProtocolBijaya Rana67% (3)
- CAN TutorialDocument22 pagesCAN TutorialApoorva BhattNo ratings yet
- CAN BusDocument33 pagesCAN BusVinod Lk100% (8)
- Controller Area Network: Submitted By:Chandra Shekar.I.G Dept of E&C 1NH02EC010 NhceDocument22 pagesController Area Network: Submitted By:Chandra Shekar.I.G Dept of E&C 1NH02EC010 Nhceapi-3760105100% (2)
- NI Tutorial 2732 enDocument5 pagesNI Tutorial 2732 enmanumanu12No ratings yet
- CAN Bus DescriptionDocument6 pagesCAN Bus DescriptionLuis Manuel GodoyNo ratings yet
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...From EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...No ratings yet
- Can BusDocument19 pagesCan BusVipin JainNo ratings yet
- Protocol Automotive IndustryDocument17 pagesProtocol Automotive IndustryUtpal100% (8)
- CAN BusDocument32 pagesCAN BusMohammed AsharNo ratings yet
- Can Test BoxDocument3 pagesCan Test Boxjulio261No ratings yet
- Can CH2 Trucks - Saej1939 PDFDocument39 pagesCan CH2 Trucks - Saej1939 PDFwtn2013No ratings yet
- Introductions of Different Communication Networks High Speed CAN BusDocument23 pagesIntroductions of Different Communication Networks High Speed CAN BusRicardo Celis rios80% (5)
- Controller Area NetworkDocument20 pagesController Area NetworkbonthanagabhushanamNo ratings yet
- Real-Time CommunicationDocument21 pagesReal-Time Communicationxpeprishey100% (1)
- Can BusDocument34 pagesCan Bushneto1975100% (4)
- CAN BUS Analyzer ToolsDocument32 pagesCAN BUS Analyzer Toolsadse2594100% (2)
- CAN Basic TraininigDocument56 pagesCAN Basic TraininigCami RoșcaNo ratings yet
- Canbus IntroductionDocument43 pagesCanbus Introductionenzzomolinari100% (1)
- Can Bus BasicsDocument21 pagesCan Bus BasicsКонстантин Дубенко100% (1)
- Vehicle Electronic Control Unit (V-ECU), Description: Service InformationDocument2 pagesVehicle Electronic Control Unit (V-ECU), Description: Service InformationJheckson BalbinotNo ratings yet
- End To End Information About CANBUSDocument18 pagesEnd To End Information About CANBUSjasmine100% (2)
- Introduction To Canbus: Jason Mccomb FitasDocument15 pagesIntroduction To Canbus: Jason Mccomb FitasMike100% (1)
- Handout Sae j1939 FundamentalsDocument54 pagesHandout Sae j1939 FundamentalsMiguel Diaz0% (1)
- Controller Area Network (CAN)Document10 pagesController Area Network (CAN)api-3754722100% (3)
- Read Write SRS MCU CAN Eng PDFDocument13 pagesRead Write SRS MCU CAN Eng PDFFlorin MoneaNo ratings yet
- Remote Diagnostic SystemDocument14 pagesRemote Diagnostic SystemBoopathirajaNo ratings yet
- Monitoring J1939 Diagnostic Trouble CodesDocument9 pagesMonitoring J1939 Diagnostic Trouble CodesRafael CardenasNo ratings yet
- 2013fusion Steering 5Document58 pages2013fusion Steering 5Andre VPNo ratings yet
- Obd II Trouble CodesDocument9 pagesObd II Trouble CodesSimonick Seta BarjeanNo ratings yet
- J1939 IntroductionDocument2 pagesJ1939 Introductionjrsimma0% (1)
- CAN Bus TutorialDocument8 pagesCAN Bus TutorialVincentius Nikim100% (1)
- 1 CAN Higher Layer ProtocolsDocument24 pages1 CAN Higher Layer ProtocolsMarcelo BelingNo ratings yet
- CAN Mode 6Document12 pagesCAN Mode 6Abdulbaset Selwy100% (1)
- Engineer's Guide To CanbusDocument16 pagesEngineer's Guide To Canbusdsldrvr100% (4)
- Sae j1939Document24 pagesSae j1939Gabriel Hernandez Gaspar100% (3)
- CAN FinalDocument30 pagesCAN Finaljyothi bagewadiNo ratings yet
- 2011 Mazda CX7Document520 pages2011 Mazda CX7SteawardNo ratings yet
- SSP - 186 - Eng Can Bus ExplanationDocument29 pagesSSP - 186 - Eng Can Bus ExplanationEcoTruck Srl Optimización ElectrónicaNo ratings yet
- 4 OBD OverviewDocument21 pages4 OBD OverviewFelipe Naxo Becerra Arriagada100% (1)
- SAE J1939 ExtendedDocument49 pagesSAE J1939 Extendedhamidh100% (4)
- j1708 IntroductionDocument5 pagesj1708 Introductionjrsimma100% (1)
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Ta Achile ManualDocument37 pagesTa Achile ManualJhonTorresRamiresNo ratings yet
- 07 Murano - Atc 39 PDFDocument1 page07 Murano - Atc 39 PDFJhonTorresRamiresNo ratings yet
- (NISSAN) Manual de Taller Nissan Murano 2004 PDFDocument150 pages(NISSAN) Manual de Taller Nissan Murano 2004 PDFJhonTorresRamiresNo ratings yet
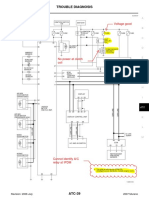
- Trouble Diagnosis Schematic: Voltage GoodDocument1 pageTrouble Diagnosis Schematic: Voltage GoodJhonTorresRamiresNo ratings yet
- Characteristic Map ThermostatDocument3 pagesCharacteristic Map ThermostatJhonTorresRamiresNo ratings yet
- Subnetting Packet 1 - IT2165Document11 pagesSubnetting Packet 1 - IT2165Jess 2000No ratings yet
- Cambium Networks Data Sheet WiFi-6-6E XE3-4 APDocument8 pagesCambium Networks Data Sheet WiFi-6-6E XE3-4 APEMILY JULIANA MAMANI MACEDONo ratings yet
- DC0034 DiagramDocument1 pageDC0034 DiagramAnkit SharmaNo ratings yet
- Virtual PETE&C 2011 Schedule of EventsDocument1 pageVirtual PETE&C 2011 Schedule of EventsrjstangherlinNo ratings yet
- Blade Servers Comparison Dell Vs Hpe Vs Lenovo Vs HuaweiDocument4 pagesBlade Servers Comparison Dell Vs Hpe Vs Lenovo Vs HuaweiYudy UtamaNo ratings yet
- MQTT Client DOKU V3-0 PT - Documentos GoogleDocument89 pagesMQTT Client DOKU V3-0 PT - Documentos GoogleJulio Cezar Berte SilvaNo ratings yet
- ZTE MF283 Manual EN PDFDocument28 pagesZTE MF283 Manual EN PDFNereo ReoliquioNo ratings yet
- Regulador BlurayDocument31 pagesRegulador BlurayPEDRO INFANTENo ratings yet
- Sixteenth Edition: Telecommunications, The Internet, and Wireless TechnologyDocument48 pagesSixteenth Edition: Telecommunications, The Internet, and Wireless TechnologyQuỳnh NguyễnNo ratings yet
- Ntag213 215 216Document58 pagesNtag213 215 216Hernan Dario Alvarez Benitez0% (1)
- Simulation and Analysis of AODV and AOMDV Protocol During Link Breakage in MANET Using NS-2Document6 pagesSimulation and Analysis of AODV and AOMDV Protocol During Link Breakage in MANET Using NS-2Zele WondeNo ratings yet
- Written by Jun Ho Bahn (Jbahn@uci - Edu) : Overview of Network-on-ChipDocument5 pagesWritten by Jun Ho Bahn (Jbahn@uci - Edu) : Overview of Network-on-ChipMitali DixitNo ratings yet
- Interview Questions With AnswersDocument3 pagesInterview Questions With AnswersDarshan GhadiNo ratings yet
- Micrologix 1400Document2 pagesMicrologix 1400Carlos RetanaNo ratings yet
- Accuver 4G Test Solution - 201100224Document38 pagesAccuver 4G Test Solution - 201100224narendra.shuklaNo ratings yet
- Product Data Sheet HecPumpDocument4 pagesProduct Data Sheet HecPumpJoshua BlevinsNo ratings yet
- Syllabus For Assistant Director IT Final After Signed 1Document13 pagesSyllabus For Assistant Director IT Final After Signed 1AllsodosoNo ratings yet
- Modelos HomologadosDocument879 pagesModelos Homologadosjgonzalez201596No ratings yet
- Getting Started: Running The Zigbee - 2006 DemoDocument17 pagesGetting Started: Running The Zigbee - 2006 DemosalzervimalNo ratings yet
- ASUSTOR AS1002T 2-Bay Entry Level NAS Multimedia Server DatasheetDocument13 pagesASUSTOR AS1002T 2-Bay Entry Level NAS Multimedia Server DatasheetWebAntics.com Online Shopping StoreNo ratings yet
- Configuring SAP SMTP ServiceDocument15 pagesConfiguring SAP SMTP ServicePRATAP SAPMMNo ratings yet
- Technical ReportDocument44 pagesTechnical Reportstephen1245No ratings yet
- Documentum Web Development KitDocument463 pagesDocumentum Web Development KitPreeti ParasharNo ratings yet
- Search Results: Pic16F887 Timer 1 en Modo Contador - YoutubeDocument3 pagesSearch Results: Pic16F887 Timer 1 en Modo Contador - YoutubeWillam TumbacoNo ratings yet
- Mac80211 Overview: Johannes Martin BergDocument47 pagesMac80211 Overview: Johannes Martin BergShiva CdacNo ratings yet
- Wifi Parabolic Antenna (Sapub) 10.5923 J JWNC 20130302.02Document5 pagesWifi Parabolic Antenna (Sapub) 10.5923 J JWNC 20130302.02Luciano Romanini AlbertiNo ratings yet
- S15 Previous WorkDocument5 pagesS15 Previous WorkJon MarcosNo ratings yet
- Deltav Two-Tank PDFDocument30 pagesDeltav Two-Tank PDFJosue ZumayaNo ratings yet
- Unit 11 Computer Network Assignment 2 Naim Miah Student NoDocument13 pagesUnit 11 Computer Network Assignment 2 Naim Miah Student Noapi-567992098No ratings yet
- Next Generation Network StandardsDocument24 pagesNext Generation Network StandardsNihar Sawant100% (12)