You might also like
- A Comparative Study of Machine Learning Algorithms For Gas Leak DetectionDocument9 pagesA Comparative Study of Machine Learning Algorithms For Gas Leak DetectionAkhil YadavNo ratings yet
- Real-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationDocument6 pagesReal-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationJUAN CAMILO TORRES MUNOZNo ratings yet
- Lidar Iris For Loop-Closure DetectionDocument7 pagesLidar Iris For Loop-Closure Detectionpepepe123jkghjkhNo ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Overlapnet: Loop Closing For Lidar-Based SlamDocument10 pagesOverlapnet: Loop Closing For Lidar-Based SlamIgnacio VizzoNo ratings yet
- Learning an Overlap-based Observation Model for 3D LiDAR LocalizationDocument7 pagesLearning an Overlap-based Observation Model for 3D LiDAR LocalizationIgnacio VizzoNo ratings yet
- RangeDet in Defense of Range View For LiDAR-Based 3D Object ICCV 2021 PaperDocument10 pagesRangeDet in Defense of Range View For LiDAR-Based 3D Object ICCV 2021 Paper姜峰No ratings yet
- Josaa 38 1 60Document11 pagesJosaa 38 1 60AmanNo ratings yet
- 3D Object Detection CS230 Project Report: Suvasis Mukherjee Stanford University (Suvasism@stanford - Edu)Document7 pages3D Object Detection CS230 Project Report: Suvasis Mukherjee Stanford University (Suvasism@stanford - Edu)Bảo Nguyễn Hoàng DuyNo ratings yet
- Lego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainDocument8 pagesLego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainMetehan DoğanNo ratings yet
- Applsci 12 01741 v2Document10 pagesApplsci 12 01741 v2Uroosa SeharNo ratings yet
- Deep Continuous Fusion for Accurate Multi-Sensor 3D Object DetectionDocument16 pagesDeep Continuous Fusion for Accurate Multi-Sensor 3D Object DetectionManoj BhatNo ratings yet
- Niemeyer 2014Document14 pagesNiemeyer 2014akuba393939No ratings yet
- 1608 07916 PDFDocument8 pages1608 07916 PDFhungbkpro90No ratings yet
- Weak Structure Model for Regular Pattern Recognition in Facade ImagesDocument14 pagesWeak Structure Model for Regular Pattern Recognition in Facade ImagesAnis KacemNo ratings yet
- Improving Localization Accuracy For Autonomous Driving in Snow-Rain EnvironmentsDocument6 pagesImproving Localization Accuracy For Autonomous Driving in Snow-Rain EnvironmentsYifeng CaoNo ratings yet
- 17icra-Probabilistic Data Association For Semantic SLAMDocument8 pages17icra-Probabilistic Data Association For Semantic SLAMys zhouNo ratings yet
- Conditional Random Fields For Lidar Point Cloud cl1Document7 pagesConditional Random Fields For Lidar Point Cloud cl1DUVAN CAMILO GOMEZ PALACIOSNo ratings yet
- Parth and Danny Robotics AIDocument6 pagesParth and Danny Robotics AIParth Pankaj TiwaryNo ratings yet
- Pang 2019Document6 pagesPang 2019RAGHU PILLINo ratings yet
- Spatial Stochastic Models and Metrics For The Structure of Base Stations in Cellular NetworksDocument13 pagesSpatial Stochastic Models and Metrics For The Structure of Base Stations in Cellular NetworksEstefenn Ollan EstebanNo ratings yet
- Sensors 21 03380 v2Document16 pagesSensors 21 03380 v2DddazzlerNo ratings yet
- Yang, Liu Et Al 2022 - Graph R-CNN - Towards Accurate 3D Object Detection With Semantic-Decorated Local GraphDocument18 pagesYang, Liu Et Al 2022 - Graph R-CNN - Towards Accurate 3D Object Detection With Semantic-Decorated Local GraphbishNo ratings yet
- Orion Estimates Shortest Paths in Large Social GraphsDocument9 pagesOrion Estimates Shortest Paths in Large Social GraphsxkjonNo ratings yet
- Experimental Evaluation and Comparison of LiDAR SLAM Algorithms For Mobile RoboticsDocument8 pagesExperimental Evaluation and Comparison of LiDAR SLAM Algorithms For Mobile Roboticscafiro7900No ratings yet
- Dokania IDD-3D Indian Driving Dataset For 3D Unstructured Road Scenes WACV 2023 PaperDocument10 pagesDokania IDD-3D Indian Driving Dataset For 3D Unstructured Road Scenes WACV 2023 PaperSharan RaoNo ratings yet
- Sandhu11 ACC Tracking LADARDocument8 pagesSandhu11 ACC Tracking LADARRomeil SandhuNo ratings yet
- Remotesensing 11 01499Document29 pagesRemotesensing 11 01499ibtissam.boumarafNo ratings yet
- Politecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSDocument7 pagesPolitecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSraisin netsNo ratings yet
- Bai TransFusion Robust LiDAR-Camera Fusion For 3D Object Detection With Transformers CVPR 2022 PaperDocument10 pagesBai TransFusion Robust LiDAR-Camera Fusion For 3D Object Detection With Transformers CVPR 2022 PaperhaisabiNo ratings yet
- 12 IMM-UKF Algorithm and IMM-EKF Algorithm ForDocument8 pages12 IMM-UKF Algorithm and IMM-EKF Algorithm ForsumathyNo ratings yet
- Prakash Multi-Modal Fusion Transformer For End-to-End Autonomous Driving CVPR 2021 PaperDocument11 pagesPrakash Multi-Modal Fusion Transformer For End-to-End Autonomous Driving CVPR 2021 PaperTrung HoàngNo ratings yet
- CenterFormer Center-Based Transformer For 3DDocument23 pagesCenterFormer Center-Based Transformer For 3DSidNo ratings yet
- Kinetic Euclidean Distance Matrices: Puoya Tabaghi, Ivan Dokmani C, Martin VetterliDocument13 pagesKinetic Euclidean Distance Matrices: Puoya Tabaghi, Ivan Dokmani C, Martin VetterliPuoyaNo ratings yet
- A Single LiDAR-Based Feature Fusion Indoor Localiz PDFDocument19 pagesA Single LiDAR-Based Feature Fusion Indoor Localiz PDFVICTOR PEREZNo ratings yet
- Sensors 18 01294 PDFDocument19 pagesSensors 18 01294 PDFVICTOR PEREZNo ratings yet
- 002 Pattern DetectionDocument15 pages002 Pattern DetectionPratik TakudageNo ratings yet
- An Improved Deep Keypoint Detection Network for Space Targets Pose EstimationDocument21 pagesAn Improved Deep Keypoint Detection Network for Space Targets Pose EstimationABờCờNguyễnNo ratings yet
- Politecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSDocument7 pagesPolitecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSPepe MNo ratings yet
- ICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixDocument7 pagesICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixmhahmadNo ratings yet
- Center FormerDocument17 pagesCenter FormerRonald BbosaNo ratings yet
- MMSP SubmittedDocument7 pagesMMSP SubmittedShopnil SarkarNo ratings yet
- 2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsDocument8 pages2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsThanh Hai NguyenNo ratings yet
- Sensors: Multi-Oriented and Scale-Invariant License Plate Detection Based On Convolutional Neural NetworksDocument19 pagesSensors: Multi-Oriented and Scale-Invariant License Plate Detection Based On Convolutional Neural NetworksIván PérezNo ratings yet
- 555Document10 pages555cuimosemailNo ratings yet
- Online SLAM Detects Moving ObjectsDocument8 pagesOnline SLAM Detects Moving ObjectsrecoNo ratings yet
- Proposals On The Source-Destination Tra C Matrix Estimation For Ip-Based VpnsDocument6 pagesProposals On The Source-Destination Tra C Matrix Estimation For Ip-Based Vpnsmohitagrawal2491No ratings yet
- Remotesensing 14 03617 v2Document21 pagesRemotesensing 14 03617 v2maryamsaleem430No ratings yet
- A New Diffusion Variable Spatial Regularized QRRLS AlgorithmDocument5 pagesA New Diffusion Variable Spatial Regularized QRRLS AlgorithmAkilesh MDNo ratings yet
- Sensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarDocument16 pagesSensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarfakeNo ratings yet
- Fast Visibility Analysis in 3D Mass Modeling Environments and Approximated Visibility Analysis Concept Using Point Clouds DataDocument10 pagesFast Visibility Analysis in 3D Mass Modeling Environments and Approximated Visibility Analysis Concept Using Point Clouds DataIJEC_EditorNo ratings yet
- A Deep Learning Approach For Face Detection and LoDocument7 pagesA Deep Learning Approach For Face Detection and LoTemitayo Olutimi EjidokunNo ratings yet
- 1 s2.0 S003132032300105X MainDocument18 pages1 s2.0 S003132032300105X Mainyang yangNo ratings yet
- High Performance Data Mining Using The Nearest Neighbor JoinDocument8 pagesHigh Performance Data Mining Using The Nearest Neighbor JoinUpinder KaurNo ratings yet
- NeRF - NavigationDocument8 pagesNeRF - NavigationBach NguyenNo ratings yet
- Detecting Objects in Scene Point Cloud Using Combination of Classification, Descriptors, RANSAC & IterationDocument9 pagesDetecting Objects in Scene Point Cloud Using Combination of Classification, Descriptors, RANSAC & IterationMario MercadoNo ratings yet
- Simonovsky Dynamic Edge-Conditioned Filters CVPR 2017 PaperDocument10 pagesSimonovsky Dynamic Edge-Conditioned Filters CVPR 2017 PaperAkshay PratapNo ratings yet
- Real-Time Star Identification Using Synthetic Radial Pattern and Its Hardware ImplementationDocument9 pagesReal-Time Star Identification Using Synthetic Radial Pattern and Its Hardware ImplementationYans PangerunganNo ratings yet
- Discriminative Regularized Deep Generative Models For Semi-Supervised LearningDocument10 pagesDiscriminative Regularized Deep Generative Models For Semi-Supervised LearningchanceNo ratings yet
- GUNDAM: A Toolkit For Fast Spatial Correlation Functions in Galaxy SurveysDocument12 pagesGUNDAM: A Toolkit For Fast Spatial Correlation Functions in Galaxy SurveysAkhmad Alfan RahadiNo ratings yet
- Papier-Mâché Approach to Learning 3D Surface GenerationDocument9 pagesPapier-Mâché Approach to Learning 3D Surface Generationpepepe123jkghjkhNo ratings yet
- Wmq71 AdministerDocument1,716 pagesWmq71 AdministerRavinderNo ratings yet
- 2010 13938 PDFDocument15 pages2010 13938 PDFpepepe123jkghjkhNo ratings yet
- Self-Supervised Learning of Lidar Odometry For Robotic ApplicationsDocument7 pagesSelf-Supervised Learning of Lidar Odometry For Robotic Applicationspepepe123jkghjkhNo ratings yet
- Self-Supervised Learning of Lidar Odometry For Robotic ApplicationsDocument7 pagesSelf-Supervised Learning of Lidar Odometry For Robotic Applicationspepepe123jkghjkhNo ratings yet
- LIO-SAM: Tightly-Coupled Lidar Inertial Odometry Via Smoothing and MappingDocument8 pagesLIO-SAM: Tightly-Coupled Lidar Inertial Odometry Via Smoothing and Mappingpepepe123jkghjkhNo ratings yet
- 2010 13938 PDFDocument15 pages2010 13938 PDFpepepe123jkghjkhNo ratings yet
- 2010 13938 PDFDocument15 pages2010 13938 PDFpepepe123jkghjkhNo ratings yet
- 0135 PDFDocument8 pages0135 PDFpepepe123jkghjkhNo ratings yet
- Self-Supervised Learning of Lidar Odometry For Robotic ApplicationsDocument7 pagesSelf-Supervised Learning of Lidar Odometry For Robotic Applicationspepepe123jkghjkhNo ratings yet
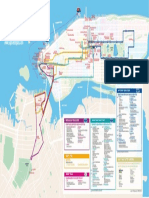
- Plano Autobuses y Cruceros Nueva YorkDocument1 pagePlano Autobuses y Cruceros Nueva Yorkmaria luisa marínNo ratings yet
- Seed: A Segmentation-Based Egocentric 3D Point Cloud Descriptor For Loop Closure DetectionDocument6 pagesSeed: A Segmentation-Based Egocentric 3D Point Cloud Descriptor For Loop Closure Detectionpepepe123jkghjkhNo ratings yet
- 0135 PDFDocument8 pages0135 PDFpepepe123jkghjkhNo ratings yet
- TT-TSDF: Memory-Efficient TSDF With Low-Rank Tensor Train DecompositionDocument6 pagesTT-TSDF: Memory-Efficient TSDF With Low-Rank Tensor Train Decompositionpepepe123jkghjkhNo ratings yet
- GP-SLAM+: Real-Time 3D Lidar SLAM Based On Improved Regionalized Gaussian Process Map ReconstructionDocument8 pagesGP-SLAM+: Real-Time 3D Lidar SLAM Based On Improved Regionalized Gaussian Process Map Reconstructionpepepe123jkghjkhNo ratings yet
- Presentations TipsDocument21 pagesPresentations Tipsapi-253601657No ratings yet
- Active Learning Methods For Interactive Image RetrievalDocument78 pagesActive Learning Methods For Interactive Image RetrievalAnilkumar ManukondaNo ratings yet
- Obfuscated Malware Detection Using Dilated Convolutional NetworkDocument6 pagesObfuscated Malware Detection Using Dilated Convolutional NetworkNicolas PinedaNo ratings yet
- IDEA - Collaborative Filtering Techniques in Recommendation SystemsDocument11 pagesIDEA - Collaborative Filtering Techniques in Recommendation SystemsSandeep RaghuwanshiNo ratings yet
- Https:/cbseacademic - Nic.in/web material/Curriculum22/SQP MS X/417 AI MDocument6 pagesHttps:/cbseacademic - Nic.in/web material/Curriculum22/SQP MS X/417 AI MSanjay SharmaNo ratings yet
- Investigating Machine Learning Approaches For Bitcoin Ransomware Payment Detection SystemsDocument7 pagesInvestigating Machine Learning Approaches For Bitcoin Ransomware Payment Detection SystemsInternational Journal of Innovative Science and Research Technology100% (2)
- Retrieval EvaluationDocument7 pagesRetrieval EvaluationAron Sajan PhilipNo ratings yet
- Interpretable Machine LearningDocument80 pagesInterpretable Machine LearningTomasz MikołajczykNo ratings yet
- DWM Lab ManualDocument92 pagesDWM Lab ManualHemamaliniNo ratings yet
- Bank RpubsDocument24 pagesBank RpubsAnil Kumar NayakNo ratings yet
- Chapter - 4 & 5Document63 pagesChapter - 4 & 5Kirubel MulugetaNo ratings yet
- Spectre@AILA-FIRE2020: Supervised Rhetorical Role Labeling For Legal Judgments Using TransformersDocument5 pagesSpectre@AILA-FIRE2020: Supervised Rhetorical Role Labeling For Legal Judgments Using TransformersTushar GargNo ratings yet
- Airline Passenger Satisfaction Prediction: Sheila Fitria Al'asqalaniDocument22 pagesAirline Passenger Satisfaction Prediction: Sheila Fitria Al'asqalaniAhza AzrNo ratings yet
- Confusion MatrixDocument14 pagesConfusion MatrixAMIT GUPTANo ratings yet
- Module 1 The Role of Machine Learning in Cyber SecurityDocument38 pagesModule 1 The Role of Machine Learning in Cyber SecurityGUNEET SURANo ratings yet
- Cattle Behaviour Classi Cation From Collar, Halter, and Ear Tag SensorsDocument10 pagesCattle Behaviour Classi Cation From Collar, Halter, and Ear Tag SensorsJoe CatchesideNo ratings yet
- Machine Learning Classification of Stars, Galaxies, and QuasarsDocument21 pagesMachine Learning Classification of Stars, Galaxies, and QuasarsGlobal Research and Development ServicesNo ratings yet
- Tsegaye Semere PDFDocument99 pagesTsegaye Semere PDFMebiratu Beyene100% (1)
- Credit Card Fraud DetectionDocument5 pagesCredit Card Fraud DetectionLojain FallatahNo ratings yet
- Electronics 11 00403 v4Document18 pagesElectronics 11 00403 v4Aditya JadhavNo ratings yet
- Veritas AI paperDocument6 pagesVeritas AI papermaxpienwtNo ratings yet
- RL Prompt-OptimizationDocument48 pagesRL Prompt-Optimizationsayedwilliams99No ratings yet
- 10 Artificialintelligence sp01Document9 pages10 Artificialintelligence sp01tanjirouchihams12No ratings yet
- CSI 4107 - Winter 2016 - FinalDocument11 pagesCSI 4107 - Winter 2016 - FinalAmin DhouibNo ratings yet
- Georgetown Business Spring/Summer 1998Document28 pagesGeorgetown Business Spring/Summer 1998tmm53No ratings yet
- Machine Learning GLDocument25 pagesMachine Learning GLrheaNo ratings yet
- Computers and Structures: Jalal Kiani, Charles Camp, Shahram PezeshkDocument15 pagesComputers and Structures: Jalal Kiani, Charles Camp, Shahram Pezeshkhamid ghorbaniNo ratings yet
- (A) EEG Emotion Recognition Using Fusion Model of Graph ConvolutionalDocument44 pages(A) EEG Emotion Recognition Using Fusion Model of Graph ConvolutionalChristian F. VegaNo ratings yet
- Hybrid Anomaly Classification with DL, BA and BGSA Optimizers for IDSDocument11 pagesHybrid Anomaly Classification with DL, BA and BGSA Optimizers for IDSRevati WableNo ratings yet
- Document AI: A Comparative Study of Transformer-Based, Graph-Based Models, and Convolutional Neural Networks For Document Layout AnalysisDocument14 pagesDocument AI: A Comparative Study of Transformer-Based, Graph-Based Models, and Convolutional Neural Networks For Document Layout AnalysisbilletonNo ratings yet