You might also like
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- RAL21 LiDocument9 pagesRAL21 LisinchijackalNo ratings yet
- LIO-SAM: Tightly-Coupled Lidar Inertial Odometry Via Smoothing and MappingDocument8 pagesLIO-SAM: Tightly-Coupled Lidar Inertial Odometry Via Smoothing and Mappingpepepe123jkghjkhNo ratings yet
- Kiss IcpDocument8 pagesKiss IcpFALAK FATIMANo ratings yet
- Grid-Based Localization Stack For Inspection Drones Towards Automation of Large Scale Warehouse SystemsDocument8 pagesGrid-Based Localization Stack For Inspection Drones Towards Automation of Large Scale Warehouse Systemsevasat111No ratings yet
- Deep Learning-Based Mutual Detection Using Solely 2DLIDAR SensorsDocument8 pagesDeep Learning-Based Mutual Detection Using Solely 2DLIDAR SensorsSoli UdinNo ratings yet
- Embedded Mobile ROS Platform For SLAM Application With RGB-D CamerasDocument5 pagesEmbedded Mobile ROS Platform For SLAM Application With RGB-D CamerasWa KaNo ratings yet
- LIO-SAM: Tightly-Coupled Lidar Inertial Odometry Via Smoothing and MappingDocument8 pagesLIO-SAM: Tightly-Coupled Lidar Inertial Odometry Via Smoothing and MappingMetehan DoğanNo ratings yet
- Joint Intrinsic and Extrinsic LiDAR-Camera Calibration in TargetlessDocument8 pagesJoint Intrinsic and Extrinsic LiDAR-Camera Calibration in Targetlesschowkamlee81No ratings yet
- ShaSTA FuseDocument8 pagesShaSTA Fuselixiaoyu12349No ratings yet
- An Occupancy Grid Mapping Enhanced Visual SLAM For Real-Time Locating Applications in Indoor GPS-denied Environments - 2019.04.011Document16 pagesAn Occupancy Grid Mapping Enhanced Visual SLAM For Real-Time Locating Applications in Indoor GPS-denied Environments - 2019.04.011Yu Han LiNo ratings yet
- Deep Learning For Image and Point Cloud Fusion in Autonomous Driving: A ReviewDocument19 pagesDeep Learning For Image and Point Cloud Fusion in Autonomous Driving: A ReviewShrida Prathamesh KalamkarNo ratings yet
- Sensors: Research and Implementation of Autonomous Navigation For Mobile Robots Based On SLAM Algorithm Under ROSDocument23 pagesSensors: Research and Implementation of Autonomous Navigation For Mobile Robots Based On SLAM Algorithm Under ROSvinay kumar yadavNo ratings yet
- Sensors 24 01222 v2Document30 pagesSensors 24 01222 v2zarrarhaiderabulkhairiNo ratings yet
- Kshitij Final SeminarDocument16 pagesKshitij Final SeminarJADHAV KUNALNo ratings yet
- Mobile Robot of Localisation and Mapping Using 2D Lidar: Abstract: Autonomous Vehicle Has Been Highly in MethodologyDocument2 pagesMobile Robot of Localisation and Mapping Using 2D Lidar: Abstract: Autonomous Vehicle Has Been Highly in MethodologyNoor AshiqinNo ratings yet
- A Comparison of Lidar-Based Slam Systems For Control of Unmanned Aerial VehiclesDocument7 pagesA Comparison of Lidar-Based Slam Systems For Control of Unmanned Aerial VehiclesMetehan DoğanNo ratings yet
- Local Descriptor For Robust Place Recognition Using Lidar IntensityDocument8 pagesLocal Descriptor For Robust Place Recognition Using Lidar IntensityAlysson Frizzera BaumgartenNo ratings yet
- Lu-Net: An Efficient Network For 3D Lidar Point Cloud Semantic Segmentation Based On End-To-End-Learned 3D Features and U-NetDocument9 pagesLu-Net: An Efficient Network For 3D Lidar Point Cloud Semantic Segmentation Based On End-To-End-Learned 3D Features and U-NetOscar MarteNo ratings yet
- Pang 2019Document6 pagesPang 2019RAGHU PILLINo ratings yet
- Detecting Drivable Area For Self-Driving Cars: An Unsupervised ApproachDocument6 pagesDetecting Drivable Area For Self-Driving Cars: An Unsupervised ApproachMayank HirparaNo ratings yet
- Vision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDocument5 pagesVision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDRathikaNo ratings yet
- A Novel Keep Zero As Zero Polar Correlation Technique For Mobile Robot Localization Using LidarDocument8 pagesA Novel Keep Zero As Zero Polar Correlation Technique For Mobile Robot Localization Using LidarrakeluvNo ratings yet
- Going Out Robust Model-Based Tracking For OutdoorDocument11 pagesGoing Out Robust Model-Based Tracking For OutdoorCindy ALVARADO BARRUETONo ratings yet
- Visual-LiDAR Based 3D Object Detection and Tracking For Embedded SystemsDocument14 pagesVisual-LiDAR Based 3D Object Detection and Tracking For Embedded Systems20bec054PRIYANSHU GUPTANo ratings yet
- Adaptive Mini-Batch Gradient-Ascent-Based Localization For Indoor IoT Networks Under Rayleigh Fading ConditionsDocument13 pagesAdaptive Mini-Batch Gradient-Ascent-Based Localization For Indoor IoT Networks Under Rayleigh Fading ConditionsKarimulla ShaikNo ratings yet
- Line FollowerDocument8 pagesLine FollowerNuno CostaNo ratings yet
- Deep Learning Based Lightweight Radar Target Detection MethodDocument10 pagesDeep Learning Based Lightweight Radar Target Detection MethodhassamaliNo ratings yet
- Robot Navigation With Obstacle Avoidance in Unknown EnvironmentDocument1 pageRobot Navigation With Obstacle Avoidance in Unknown EnvironmentNeerendra kumarNo ratings yet
- Bhat 2014Document6 pagesBhat 2014amoNo ratings yet
- Lego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainDocument8 pagesLego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainMetehan DoğanNo ratings yet
- Developing Advanced Driver Assistance Systems (ADAS) and Functions For Autonomous DrivingDocument28 pagesDeveloping Advanced Driver Assistance Systems (ADAS) and Functions For Autonomous DrivingZul Zulhilmi100% (1)
- A 3D-Deep-Learning-based Augmented Reality Calibration Method ForDocument7 pagesA 3D-Deep-Learning-based Augmented Reality Calibration Method ForManny MerazinniNo ratings yet
- Obstacle Detection Using A 2D LIDAR System For An Autonomous VehicleDocument5 pagesObstacle Detection Using A 2D LIDAR System For An Autonomous VehicleculiadosNo ratings yet
- LIDAR Based Detection of Road Boundaries Using The Dens - 2021 - Robotics and AuDocument13 pagesLIDAR Based Detection of Road Boundaries Using The Dens - 2021 - Robotics and Aulihef14829No ratings yet
- A Deep Learning Gated Architecture For UGV Navigation Robust To SensorDocument18 pagesA Deep Learning Gated Architecture For UGV Navigation Robust To SensorOscar Ramos SotoNo ratings yet
- A Survey of Simultaneous Localization and Mapping With AnDocument17 pagesA Survey of Simultaneous Localization and Mapping With Anzhenhua wuNo ratings yet
- WP - Better and Faster Survey Data Through Technology - Get Geospatial AreadyDocument10 pagesWP - Better and Faster Survey Data Through Technology - Get Geospatial Areadyraphael sermetNo ratings yet
- Zhang 2020Document9 pagesZhang 2020basirma.info.officer.2017No ratings yet
- (C) 2019 Application of Outlier Detection Using Re-Weighted Least Squares and R-Squared For IoT Extracted DataDocument6 pages(C) 2019 Application of Outlier Detection Using Re-Weighted Least Squares and R-Squared For IoT Extracted Datadr.awawdeh.moathNo ratings yet
- Autonomous Navigation of Indoor Service Robot With Object Recognition Using Deep LearningDocument17 pagesAutonomous Navigation of Indoor Service Robot With Object Recognition Using Deep LearningIJRASETPublicationsNo ratings yet
- ISPRS Journal of Photogrammetry and Remote Sensing: Wei Yao, Stefan Hinz, Uwe StillaDocument12 pagesISPRS Journal of Photogrammetry and Remote Sensing: Wei Yao, Stefan Hinz, Uwe Stillasupersian11No ratings yet
- SMURF Spatial Multi-Representation Fusion For 3D Object Detection With 4D Imaging RadarDocument14 pagesSMURF Spatial Multi-Representation Fusion For 3D Object Detection With 4D Imaging RadarGuilherme OliveiraNo ratings yet
- 1608 07916 PDFDocument8 pages1608 07916 PDFhungbkpro90No ratings yet
- Articulo 4Document12 pagesArticulo 4LAURA XIMENA ARISMENDY TRIANANo ratings yet
- Coco LICDocument8 pagesCoco LICys zhouNo ratings yet
- ZoomNet Part-Aware Adaptive Zooming Neural Network For 3D Object DetectionDocument9 pagesZoomNet Part-Aware Adaptive Zooming Neural Network For 3D Object DetectionbishNo ratings yet
- Moving Vehicle Detection and Speed Measurement in Video Sequence IJERTV2IS100920Document4 pagesMoving Vehicle Detection and Speed Measurement in Video Sequence IJERTV2IS100920aniket wadheNo ratings yet
- Deep Radar Waveform Design For Efficient Automotive Radar SensingDocument6 pagesDeep Radar Waveform Design For Efficient Automotive Radar SensingefgdfhsdNo ratings yet
- Qpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesDocument7 pagesQpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesHoracio KejnNo ratings yet
- RSS 2014Document10 pagesRSS 2014FALAK FATIMANo ratings yet
- Recent - Trends in SurveyingDocument26 pagesRecent - Trends in SurveyingSanghNo ratings yet
- Zebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingDocument16 pagesZebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingAndrej BašićNo ratings yet
- A Multimodal Dataset For Autonomous DrivingDocument16 pagesA Multimodal Dataset For Autonomous DrivingSanthiya SanthiyaNo ratings yet
- Deep Open Space Segmentation Using Automotive RadarDocument4 pagesDeep Open Space Segmentation Using Automotive RadarefgdfhsdNo ratings yet
- Simple-BEV: What Really Matters For Multi-Sensor BEV Perception?Document7 pagesSimple-BEV: What Really Matters For Multi-Sensor BEV Perception?uwucacaigorNo ratings yet
- Deep Learning Based Obstacle Detection and Classification With Portable Uncalibrated Patterned LightDocument10 pagesDeep Learning Based Obstacle Detection and Classification With Portable Uncalibrated Patterned LightKARTHICK ANo ratings yet
- A Comprehensive Survey of LIDAR-based 3D Object Detection MethodsDocument29 pagesA Comprehensive Survey of LIDAR-based 3D Object Detection MethodsWilliam SantosNo ratings yet
- Squeeze SegDocument7 pagesSqueeze SegAditya JoshiNo ratings yet
- BirdNet A 3D Object Detection FrameworkDocument8 pagesBirdNet A 3D Object Detection Frameworksoswa gzNo ratings yet
- Wmq71 AdministerDocument1,716 pagesWmq71 AdministerRavinderNo ratings yet
- Self-Supervised Learning of Lidar Odometry For Robotic ApplicationsDocument7 pagesSelf-Supervised Learning of Lidar Odometry For Robotic Applicationspepepe123jkghjkhNo ratings yet
- 2010 13938 PDFDocument15 pages2010 13938 PDFpepepe123jkghjkhNo ratings yet
- A Papier-M Ach e Approach To Learning 3D Surface GenerationDocument9 pagesA Papier-M Ach e Approach To Learning 3D Surface Generationpepepe123jkghjkhNo ratings yet
- 2010 13938 PDFDocument15 pages2010 13938 PDFpepepe123jkghjkhNo ratings yet
- Self-Supervised Learning of Lidar Odometry For Robotic ApplicationsDocument7 pagesSelf-Supervised Learning of Lidar Odometry For Robotic Applicationspepepe123jkghjkhNo ratings yet
- 2010 13938 PDFDocument15 pages2010 13938 PDFpepepe123jkghjkhNo ratings yet
- 0135 PDFDocument8 pages0135 PDFpepepe123jkghjkhNo ratings yet
- 0135 PDFDocument8 pages0135 PDFpepepe123jkghjkhNo ratings yet
- Lidar Iris For Loop-Closure DetectionDocument7 pagesLidar Iris For Loop-Closure Detectionpepepe123jkghjkhNo ratings yet
- Gosmatch: Graph-Of-Semantics Matching For Detecting Loop Closures in 3D Lidar DataDocument7 pagesGosmatch: Graph-Of-Semantics Matching For Detecting Loop Closures in 3D Lidar Datapepepe123jkghjkhNo ratings yet
- Seed: A Segmentation-Based Egocentric 3D Point Cloud Descriptor For Loop Closure DetectionDocument6 pagesSeed: A Segmentation-Based Egocentric 3D Point Cloud Descriptor For Loop Closure Detectionpepepe123jkghjkhNo ratings yet
- TT-TSDF: Memory-Efficient TSDF With Low-Rank Tensor Train DecompositionDocument6 pagesTT-TSDF: Memory-Efficient TSDF With Low-Rank Tensor Train Decompositionpepepe123jkghjkhNo ratings yet
- GP-SLAM+: Real-Time 3D Lidar SLAM Based On Improved Regionalized Gaussian Process Map ReconstructionDocument8 pagesGP-SLAM+: Real-Time 3D Lidar SLAM Based On Improved Regionalized Gaussian Process Map Reconstructionpepepe123jkghjkhNo ratings yet
- Presentations TipsDocument21 pagesPresentations Tipsapi-253601657No ratings yet
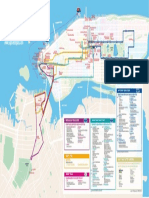
- Plano Autobuses y Cruceros Nueva YorkDocument1 pagePlano Autobuses y Cruceros Nueva Yorkmaria luisa marínNo ratings yet
- Attributes Assessing The Quality of Microservices Automatically Decomposed From Monolithic ApplicationsDocument10 pagesAttributes Assessing The Quality of Microservices Automatically Decomposed From Monolithic ApplicationsNelson FabianNo ratings yet
- Invoice TemplateDocument7 pagesInvoice TemplateRaghu DayearNo ratings yet
- Ajay Singh - Hadoop ResumeDocument2 pagesAjay Singh - Hadoop ResumeAjay Singh67% (3)
- Parsing and Manipulating Text PDFDocument33 pagesParsing and Manipulating Text PDFdiekoNo ratings yet
- Assignment 3Document4 pagesAssignment 3Dark RebelNo ratings yet
- Cloud Computing Question BankDocument5 pagesCloud Computing Question BankSundara KumarNo ratings yet
- Ram and Its Types: Multiplexing DemultiplexingDocument3 pagesRam and Its Types: Multiplexing Demultiplexingusman100% (1)
- NetBackup1011 Self Service Installation GuideDocument47 pagesNetBackup1011 Self Service Installation GuideQamar AbbasNo ratings yet
- Computer ProgrammingDocument2 pagesComputer ProgrammingHelloNo ratings yet
- NUMTA2019 - LNCS - 11973 (Part I) PDFDocument634 pagesNUMTA2019 - LNCS - 11973 (Part I) PDFSandraVisokolskisNo ratings yet
- Day 1 - Number Systems & Prime Factorization NOTESDocument2 pagesDay 1 - Number Systems & Prime Factorization NOTESAmaka UNo ratings yet
- Project-Proposal On Internet Wireless Connection (P2P)Document5 pagesProject-Proposal On Internet Wireless Connection (P2P)Princess Joy Gavileño100% (4)
- Avaya Vs Cisco ComparisonDocument29 pagesAvaya Vs Cisco ComparisonFranklin ServellonNo ratings yet
- Issue Environment Resolution: Hexagon PPM Support FAQDocument15 pagesIssue Environment Resolution: Hexagon PPM Support FAQMechNo ratings yet
- Almond Enterprises: Quotation No.Document2 pagesAlmond Enterprises: Quotation No.sushanta chowdhuryNo ratings yet
- Prueba Recien CreadoDocument7 pagesPrueba Recien Creadorgarcia.universalesNo ratings yet
- JVC KD-G820 User ManualDocument352 pagesJVC KD-G820 User ManualfunkenfunkNo ratings yet
- KVS PGT Computer Science Syllabus PDF 2022Document5 pagesKVS PGT Computer Science Syllabus PDF 2022balajiNo ratings yet
- CN and OS Lab ManualDocument53 pagesCN and OS Lab Manualsudheer mangalampalliNo ratings yet
- FortiADC Exchange2016 Deployment GuideDocument18 pagesFortiADC Exchange2016 Deployment GuideYazan MashalNo ratings yet
- Adobe Photoshop 2023 User Guide by Golden MCphersonDocument403 pagesAdobe Photoshop 2023 User Guide by Golden MCphersonvvvvmvaNo ratings yet
- Frequently Asked Questions in AS/400: 7. How Can You Check For A Records Existence Without Causing and I/O (CHAIN/READ) ?Document66 pagesFrequently Asked Questions in AS/400: 7. How Can You Check For A Records Existence Without Causing and I/O (CHAIN/READ) ?VivianNo ratings yet
- Digital Transformation of Local Government: A Case Study From GreeceDocument10 pagesDigital Transformation of Local Government: A Case Study From GreeceDaniela Gabriela CazanNo ratings yet
- OrangePi Zero2 H616 User Manual v3.7Document434 pagesOrangePi Zero2 H616 User Manual v3.7leroy23No ratings yet
- Instruction Manual SPD-M40Document106 pagesInstruction Manual SPD-M40Cuong NguyenNo ratings yet
- Summer - 18: (C) Explain Any Four Features of Java Programming. 4M AnsDocument14 pagesSummer - 18: (C) Explain Any Four Features of Java Programming. 4M AnsDevidas BhereNo ratings yet
- Service Manual: Audio SystemDocument58 pagesService Manual: Audio SystemDaniel Norberto DemariaNo ratings yet
- Machine Id6Document3 pagesMachine Id6mdemianjimenezNo ratings yet
- DCPF04 - ReiriOffice Touch Installation ManualDocument66 pagesDCPF04 - ReiriOffice Touch Installation ManualD. D.No ratings yet
- How To Load EIBs - JobAidDocument6 pagesHow To Load EIBs - JobAidYaowenNo ratings yet
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityFrom EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityRating: 5 out of 5 stars5/5 (1)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Cyber War: The Next Threat to National Security and What to Do About ItFrom EverandCyber War: The Next Threat to National Security and What to Do About ItRating: 3.5 out of 5 stars3.5/5 (66)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyFrom EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyRating: 3.5 out of 5 stars3.5/5 (111)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Dark Data: Why What You Don’t Know MattersFrom EverandDark Data: Why What You Don’t Know MattersRating: 4.5 out of 5 stars4.5/5 (3)
- The Internet Con: How to Seize the Means of ComputationFrom EverandThe Internet Con: How to Seize the Means of ComputationRating: 5 out of 5 stars5/5 (6)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideFrom EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideRating: 5 out of 5 stars5/5 (2)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- AI Prompting Mastery: Strategies and Techniques for Effective PromptingFrom EverandAI Prompting Mastery: Strategies and Techniques for Effective PromptingNo ratings yet
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)