You might also like
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Kinetic Energy Storage: Theory and Practice of Advanced Flywheel SystemsFrom EverandKinetic Energy Storage: Theory and Practice of Advanced Flywheel SystemsRating: 3 out of 5 stars3/5 (1)
- STS Container Cranes - Anti-Sway ControlDocument15 pagesSTS Container Cranes - Anti-Sway ControlLeJanx0% (1)
- Icace 18 66Document3 pagesIcace 18 66Aditya DawareNo ratings yet
- Sensitivity Analysis For Ship To Shore CDocument14 pagesSensitivity Analysis For Ship To Shore Crian-jiee-tauwwa-8573No ratings yet
- A Study On The Modeling of A Hexacopter: December 2015Document9 pagesA Study On The Modeling of A Hexacopter: December 2015nkofodileNo ratings yet
- Motions and forces in aerial ropewaysDocument13 pagesMotions and forces in aerial ropewaysNyi NyiNo ratings yet
- A Feedback Linearization Control of Container Cranes: Varying Rope LengthDocument10 pagesA Feedback Linearization Control of Container Cranes: Varying Rope LengthAdarsh shandilyaNo ratings yet
- Carbody TiltingDocument34 pagesCarbody TiltinggundunathNo ratings yet
- J Tws 2014 09 009 PDFDocument9 pagesJ Tws 2014 09 009 PDFHisham SyedNo ratings yet
- Effect of Taper Tension Profile PDFDocument13 pagesEffect of Taper Tension Profile PDFHafiani HichamNo ratings yet
- Kinematics of Machine Lab ManualDocument29 pagesKinematics of Machine Lab ManualNottaAmandeepSingh100% (1)
- The Mathematical Model of The Belt Conveyor PDFDocument8 pagesThe Mathematical Model of The Belt Conveyor PDFDiego FernándezNo ratings yet
- SSRN Id4396971Document16 pagesSSRN Id4396971José Manuel SoriaNo ratings yet
- Design of Gantry Girder for Overhead CranesDocument2 pagesDesign of Gantry Girder for Overhead CranesSivaAgathamudiNo ratings yet
- Evaluating service life of port cranesDocument9 pagesEvaluating service life of port cranesFlávio LasmarNo ratings yet
- 1978 Analysing The Vibrating Conveyor - WinklerDocument10 pages1978 Analysing The Vibrating Conveyor - WinklerУрош ИлићNo ratings yet
- Stress Analysis of Jib, Countrjib and Hook of Tower Crane: A ReviewDocument5 pagesStress Analysis of Jib, Countrjib and Hook of Tower Crane: A ReviewAkshay SarafNo ratings yet
- Analysis_of_load_monitoring_system_in_hydraulic_moDocument11 pagesAnalysis_of_load_monitoring_system_in_hydraulic_mochzakiabbas5250No ratings yet
- Space Trasportation Systems: Master Course For Graduate StudentsDocument13 pagesSpace Trasportation Systems: Master Course For Graduate Studentsblackmamba182No ratings yet
- Archive of SIDDocument13 pagesArchive of SIDyogacruiseNo ratings yet
- WBK WD LonginDocument10 pagesWBK WD Longinsofronije2005No ratings yet
- A Design of High Efficient Gantry Crane For Ultra Large Container Ship Young Jin Lee, Jin Ho Suh, Jin Woo Lee, Suk Gyu Lee, and Kwon Soon LeeDocument6 pagesA Design of High Efficient Gantry Crane For Ultra Large Container Ship Young Jin Lee, Jin Ho Suh, Jin Woo Lee, Suk Gyu Lee, and Kwon Soon LeeVictor Hugo ChoqueNo ratings yet
- Stabilization of Load's Position in Offshore Cranes: A. Maczyn Ski S. WojciechDocument10 pagesStabilization of Load's Position in Offshore Cranes: A. Maczyn Ski S. WojciechGrant HosieNo ratings yet
- Design and Control of Hybrid Underwater GliderDocument9 pagesDesign and Control of Hybrid Underwater GliderAnh NgoNo ratings yet
- rotating bridgeDocument10 pagesrotating bridgesethyankitaraniNo ratings yet
- Analysis of A Grain Motion in The Transfer Area of The Belt ConveyorDocument14 pagesAnalysis of A Grain Motion in The Transfer Area of The Belt ConveyorczoobsNo ratings yet
- Mathematical and Computer Modelling of Dynamical Systems: Methods, Tools and Applications in Engineering and Related SciencesDocument20 pagesMathematical and Computer Modelling of Dynamical Systems: Methods, Tools and Applications in Engineering and Related SciencesbrkNo ratings yet
- Fulltext 3Document6 pagesFulltext 3ijal84No ratings yet
- Failure Analysis of A Two High Gearbox ShaftDocument10 pagesFailure Analysis of A Two High Gearbox ShaftNguyễnVănLăngNo ratings yet
- MHD DesignDocument14 pagesMHD DesignaldandanalNo ratings yet
- 3 Nejad Et Al-LibreDocument10 pages3 Nejad Et Al-LibreEsthi KusumaNo ratings yet
- Anti-Sway System For Ship-to-Shore Cranes: Raubar, E. - Vrančić, DDocument7 pagesAnti-Sway System For Ship-to-Shore Cranes: Raubar, E. - Vrančić, Dsajjad_naghdi241No ratings yet
- Mooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PDocument12 pagesMooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PaaNo ratings yet
- Paper 1 PDFDocument7 pagesPaper 1 PDFVisa Meena2351No ratings yet
- Ijess Volume3, Issue6 ISSN: 2249-9482 Operation and Maintenance of Stacker Cum Relaimer in Coal Handling Plant in Thermal Power PlantDocument7 pagesIjess Volume3, Issue6 ISSN: 2249-9482 Operation and Maintenance of Stacker Cum Relaimer in Coal Handling Plant in Thermal Power Plantramanujam59No ratings yet
- Conveyor Trajectory Prediction Methods - A Review: Research OnlineDocument16 pagesConveyor Trajectory Prediction Methods - A Review: Research OnlineubabNo ratings yet
- Stability control model for huge surface excavatorDocument10 pagesStability control model for huge surface excavatorJoseph JoseNo ratings yet
- New Sensor For Lateral & Vertical Wheel-Rail Forces MeasurementsDocument7 pagesNew Sensor For Lateral & Vertical Wheel-Rail Forces MeasurementsBoussalia LatifaNo ratings yet
- Dynamics of CranesDocument46 pagesDynamics of CranesGogyNo ratings yet
- Validation of Use of Fem (Ansys) For Structural Analysis of Tower Crane Jib and Static and Dynamic Analysis of Tower Crane Jib Using AnsysDocument7 pagesValidation of Use of Fem (Ansys) For Structural Analysis of Tower Crane Jib and Static and Dynamic Analysis of Tower Crane Jib Using AnsysKaique CavalcanteNo ratings yet
- Transients Analysis of A Tidal Currents Self-Balancing Kinetic Turbine With On Shore BasementDocument8 pagesTransients Analysis of A Tidal Currents Self-Balancing Kinetic Turbine With On Shore BasementDimas Hanif NugrahaNo ratings yet
- 90497-Article Text-191902-1-10-20170127Document22 pages90497-Article Text-191902-1-10-20170127Ajay lokhandeNo ratings yet
- ConveyorDocument81 pagesConveyorhaymanotNo ratings yet
- 3 D Modelling and Finite Element Analysis of Eot CraneDocument4 pages3 D Modelling and Finite Element Analysis of Eot CraneKenneth ShumNo ratings yet
- Comparative Assessment of Anti-Sway Control for Tower CranesDocument10 pagesComparative Assessment of Anti-Sway Control for Tower CranesPhat Luu TienNo ratings yet
- Design and analysis of quadcopter frameDocument12 pagesDesign and analysis of quadcopter framenguyễn namNo ratings yet
- Eddy Current DampingDocument12 pagesEddy Current DampingNikhil ahireNo ratings yet
- Optimizing Screw ConveyorDocument6 pagesOptimizing Screw ConveyorChem.Engg100% (1)
- REMOTE CONTROLLED MOTORIZED JIB CRANE - NewDocument61 pagesREMOTE CONTROLLED MOTORIZED JIB CRANE - NewIYAPPAN ANo ratings yet
- 0 GTC-400EX LOAD CHART, With 4m Track Position, ISO, 3B6 PDFDocument41 pages0 GTC-400EX LOAD CHART, With 4m Track Position, ISO, 3B6 PDFRobertNo ratings yet
- IRJET V6I1223620200108 103777 1f80cck With Cover Page v2Document4 pagesIRJET V6I1223620200108 103777 1f80cck With Cover Page v2Team LegendsNo ratings yet
- Fatigue Analysis of Excavator Arm Reduced in Weight by Structural Optimization MethodsDocument6 pagesFatigue Analysis of Excavator Arm Reduced in Weight by Structural Optimization MethodsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 桥式起重机偏斜侧向力的研究Document78 pages桥式起重机偏斜侧向力的研究Jay ChanNo ratings yet
- Nan 2021 J. Phys. Conf. Ser. 1948 012076Document6 pagesNan 2021 J. Phys. Conf. Ser. 1948 012076Nikmah MhNo ratings yet
- Control of Bridge Cranes With Distributed-Mass Payloads Under WindyconditionsDocument11 pagesControl of Bridge Cranes With Distributed-Mass Payloads Under WindyconditionsGogyNo ratings yet
- Discrete Element Simulation On The Key Parameters of Bucket Wheel Stacker-Reclaimer Based On Virtual Prototyping TechnologyDocument8 pagesDiscrete Element Simulation On The Key Parameters of Bucket Wheel Stacker-Reclaimer Based On Virtual Prototyping TechnologymercyNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Mechanical Appliances, Mechanical Movements and Novelties of ConstructionFrom EverandMechanical Appliances, Mechanical Movements and Novelties of ConstructionRating: 4 out of 5 stars4/5 (2)
- Windstorm II - Practical Guidance For Marine and Inland TerminalsDocument126 pagesWindstorm II - Practical Guidance For Marine and Inland TerminalsGer BosNo ratings yet
- PEMA IP19 Hoist Winch Gearboxes and Breaks On STS CranesDocument18 pagesPEMA IP19 Hoist Winch Gearboxes and Breaks On STS CranesGer BosNo ratings yet
- ML Couplings Instruction ManualDocument4 pagesML Couplings Instruction ManualGer BosNo ratings yet
- Tds Eng Varybond Regular Grade EnglishDocument1 pageTds Eng Varybond Regular Grade EnglishGer BosNo ratings yet
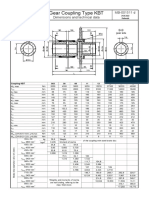
- KBT Coupling - Dimension and Technical DataDocument1 pageKBT Coupling - Dimension and Technical DataGer BosNo ratings yet
- American steel grades A36, A572, A588, A709, A913, A992 propertiesDocument1 pageAmerican steel grades A36, A572, A588, A709, A913, A992 propertiesRaymondLeungNo ratings yet
- Container Glossary by Damir Drinkovic PDFDocument123 pagesContainer Glossary by Damir Drinkovic PDFGer BosNo ratings yet
- MSDS - Gadus S2 V220AD 2Document9 pagesMSDS - Gadus S2 V220AD 2Ger BosNo ratings yet
- En 1993 1 12 2007 PDFDocument11 pagesEn 1993 1 12 2007 PDFRajan SteeveNo ratings yet
- Wire Ropes and Their Uses LP Briefing PDFDocument22 pagesWire Ropes and Their Uses LP Briefing PDFHector G. LezaNo ratings yet
- Fundamentals of Gear Drives in 6 SectionsDocument79 pagesFundamentals of Gear Drives in 6 SectionsKushal santra100% (1)
- Section 3 - Maintenance Instruction - ZPMCDocument38 pagesSection 3 - Maintenance Instruction - ZPMCGer Bos100% (1)
- Overcurrent Protection / 7SJ63Document38 pagesOvercurrent Protection / 7SJ63KnjigescribdNo ratings yet
- Wireless World 1983 10Document118 pagesWireless World 1983 10asd100% (1)
- MCG5343 AdvancedThermo Introduction Fall2023Document2 pagesMCG5343 AdvancedThermo Introduction Fall2023Ryan HiraniNo ratings yet
- Nlight Hardware ManualDocument42 pagesNlight Hardware Manualtberg32No ratings yet
- Manual Sensor Foto Electrico 02Document4 pagesManual Sensor Foto Electrico 02Daniel Santiago Urquina CastañoNo ratings yet
- GEM-2 Short User ManualDocument22 pagesGEM-2 Short User Manualhojanico21No ratings yet
- The Trachtenberg System, WikipediaDocument9 pagesThe Trachtenberg System, WikipediaShrishailamalikarjunNo ratings yet
- Convert Units, Scales, Errors Worksheet SolutionsDocument2 pagesConvert Units, Scales, Errors Worksheet SolutionsAMANUEL WORKU83% (6)
- Nokia Networks: VoLTE Optimization GuideDocument20 pagesNokia Networks: VoLTE Optimization GuideKamil KocNo ratings yet
- Balancing of Reciprocating MassesDocument43 pagesBalancing of Reciprocating MassesNAVEENNo ratings yet
- Steel - Chapter 4Document18 pagesSteel - Chapter 4Kristoffer NaridoNo ratings yet
- OOP Lesson PlanDocument8 pagesOOP Lesson PlanPrema SelvamNo ratings yet
- Pareto Analysis v2.ppt 1Document7 pagesPareto Analysis v2.ppt 1prabu06051984No ratings yet
- Astrological Sign: Western Zodiac SignsDocument3 pagesAstrological Sign: Western Zodiac SignsmackNo ratings yet
- Astm D5454 11 2020Document1 pageAstm D5454 11 2020MiguelNo ratings yet
- OSHA Technical ManualDocument102 pagesOSHA Technical ManualthugpanditNo ratings yet
- Optimize VRM Operation & Parameters in 40 CharactersDocument32 pagesOptimize VRM Operation & Parameters in 40 Charactersrecai100% (5)
- Master Resource Book in Physics For JEE Main 2020 by D. B. SinghskksDocument1,425 pagesMaster Resource Book in Physics For JEE Main 2020 by D. B. SinghskksSAHIL YADAV 7825No ratings yet
- Sampling Distributions Solved QuestionsDocument4 pagesSampling Distributions Solved Questionsrangoli maheshwariNo ratings yet
- Lin e Hanratty 1986 Prediction PDFDocument20 pagesLin e Hanratty 1986 Prediction PDFFrancisco OppsNo ratings yet
- Current Loop (4-20 Ma) OUTPUT: SourceDocument1 pageCurrent Loop (4-20 Ma) OUTPUT: SourceMatiasNo ratings yet
- MIND Seamap GunLink 2500Document4 pagesMIND Seamap GunLink 2500Steve HeartNo ratings yet
- Surgical Anatomy of the Anal CanalDocument69 pagesSurgical Anatomy of the Anal CanalVijaya Dwarampudi100% (1)
- Cloud Computing Bangla-Ragib HassanDocument19 pagesCloud Computing Bangla-Ragib HassanShah Shishir100% (1)
- PDMS Shotcut Commands PDFDocument14 pagesPDMS Shotcut Commands PDFAbdulateaf Abdulrazig Satti86% (14)
- Problem Set 1 - SolutionsDocument4 pagesProblem Set 1 - SolutionsAlex FavelaNo ratings yet
- Lab Report Chemistry Experiment 6 Group 1Document12 pagesLab Report Chemistry Experiment 6 Group 1NUR RABIAHTUL NAZILLA BINTI MAPATANG FS21110430No ratings yet
- 2011 Sakura WSHP R410A - Installation ManualDocument12 pages2011 Sakura WSHP R410A - Installation ManualMaurizio DumitracheNo ratings yet
- CH 4 PDFDocument115 pagesCH 4 PDFabood buriahiNo ratings yet
- IP 346-92 Determination of PAC in LubrificantsDocument6 pagesIP 346-92 Determination of PAC in LubrificantsMark Foster Jr.100% (1)