You might also like
- PSD SiemensDocument45 pagesPSD Siemensbrijendra2185% (13)
- 2kW Free Energy Device - Don SmithDocument5 pages2kW Free Energy Device - Don SmithJake Mitchell81% (26)
- Simulink Model of Centrifugal Pumping SystemDocument4 pagesSimulink Model of Centrifugal Pumping SystemsidNo ratings yet
- Samsung HT c7559w Xeg SMDocument131 pagesSamsung HT c7559w Xeg SMboroda2410No ratings yet
- Flash On English For Mechanics, Electronics and Technical Assistance - Answer Key and TranscriptsDocument11 pagesFlash On English For Mechanics, Electronics and Technical Assistance - Answer Key and TranscriptsRe A.100% (1)
- (FBM230231232233) User's GuideDocument240 pages(FBM230231232233) User's Guidemissoum mohamed100% (3)
- 220kv ShornurDocument102 pages220kv ShornurAhamed Shahin CkNo ratings yet
- Shao 2015Document5 pagesShao 2015Hamza DiNo ratings yet
- 2004 Jun FuzzyDocument5 pages2004 Jun FuzzyCumhur ÖzbaşNo ratings yet
- An Intelligent Electro-Hydraulic Servo Drive Positioning: Detiček, E. - Župerl, UDocument11 pagesAn Intelligent Electro-Hydraulic Servo Drive Positioning: Detiček, E. - Župerl, Upolat035No ratings yet
- Nicola - Marcel - ICATE 2016Document6 pagesNicola - Marcel - ICATE 2016Marcel NicolaNo ratings yet
- A Design Method of Pi Controller For An Induction Motor With Par PDFDocument6 pagesA Design Method of Pi Controller For An Induction Motor With Par PDFijazNo ratings yet
- Sliding Mode Backstepping Control of Induction MotorDocument8 pagesSliding Mode Backstepping Control of Induction MotorBENDE Isaac fredyNo ratings yet
- Feed Forward Linear Quadratic Controller Design For An Industrial Electro Hydraulic Actuator System With Servo ValveDocument17 pagesFeed Forward Linear Quadratic Controller Design For An Industrial Electro Hydraulic Actuator System With Servo ValveVăn Nghĩa NguyễnNo ratings yet
- Adaptive Full-Order Observer For Induction Motor Based On Bilinear Transformation MethodDocument5 pagesAdaptive Full-Order Observer For Induction Motor Based On Bilinear Transformation MethodanadieenlatierraNo ratings yet
- Real-Time Observer-Based - Adaptive - Control of A Permanent-Magnet Synchronous Motor Without Mechanical SensorsDocument8 pagesReal-Time Observer-Based - Adaptive - Control of A Permanent-Magnet Synchronous Motor Without Mechanical Sensors22dr0302No ratings yet
- Speed Control of DC Motor Using Fuzzy Logic Based On LabviewDocument5 pagesSpeed Control of DC Motor Using Fuzzy Logic Based On LabviewAbdulrahman BastaNo ratings yet
- Model Predictive Direct Torque Control Methods For SpeedDocument25 pagesModel Predictive Direct Torque Control Methods For SpeedAayush PatidarNo ratings yet
- TRMS State Feedback 1Document5 pagesTRMS State Feedback 1KKWNo ratings yet
- Optimal PID Controller Parameters For Vector ContrDocument8 pagesOptimal PID Controller Parameters For Vector ContrTony starkNo ratings yet
- IET PE DraftDocument11 pagesIET PE DraftArghya ChakravartyNo ratings yet
- Điều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiDocument10 pagesĐiều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiNguyễn Văn HoàNo ratings yet
- Sensorless Vector Controller For A Synchronous Reluctance MotorDocument9 pagesSensorless Vector Controller For A Synchronous Reluctance MotorUma SathyadevanNo ratings yet
- Speed Control of BLDC Motor Drive For Various ApplicationsDocument6 pagesSpeed Control of BLDC Motor Drive For Various ApplicationsAnonymous izrFWiQNo ratings yet
- Thyristor Based Speed Control Techniques of DC Motor: A Comparative AnalysisDocument7 pagesThyristor Based Speed Control Techniques of DC Motor: A Comparative Analysismahendra ANo ratings yet
- Bodson - Chiasson - Induction Motor Via Input-Output LinearDocument9 pagesBodson - Chiasson - Induction Motor Via Input-Output LinearmorilloatilioNo ratings yet
- Development of Microprocessor, Time Optimized Stepper Motor Driving AlgorithmDocument6 pagesDevelopment of Microprocessor, Time Optimized Stepper Motor Driving AlgorithmDaniel Alejandro RodriguezNo ratings yet
- Paris, FranceICSTEM (2019)Document6 pagesParis, FranceICSTEM (2019)Dr. D. V. KamathNo ratings yet
- Deadbeat Flux Level Control of Direct Field-Oriented High Horse Power Induction Servo Motor Using Adaptive Rotor Flux ObserverDocument9 pagesDeadbeat Flux Level Control of Direct Field-Oriented High Horse Power Induction Servo Motor Using Adaptive Rotor Flux Observerapi-3826450No ratings yet
- 3-Sliding Mode ControlDocument10 pages3-Sliding Mode Controlramaprasad1967No ratings yet
- Ias 1999 801662Document8 pagesIas 1999 801662aasfklNo ratings yet
- Model Reference Adaptive Control For DC Motor Based On SimulinkDocument6 pagesModel Reference Adaptive Control For DC Motor Based On SimulinkJubei YanaikiNo ratings yet
- Fractional Order PID Control of Rotor Suspension by Active Magnetic BearingsDocument31 pagesFractional Order PID Control of Rotor Suspension by Active Magnetic BearingsNguyen Van QuyenNo ratings yet
- Zhe 2014Document12 pagesZhe 2014Ankur ThakurNo ratings yet
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocument8 pagesElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariNo ratings yet
- 4 PBDocument8 pages4 PBs.mencouNo ratings yet
- Design and Experiments of The Active Magnetic Bearing System For The Htr-10Document16 pagesDesign and Experiments of The Active Magnetic Bearing System For The Htr-10andy131078No ratings yet
- Artificial Neural Network Based Controller For Speed Control of An Induction Motor Using Indirect Vector Control MethodDocument7 pagesArtificial Neural Network Based Controller For Speed Control of An Induction Motor Using Indirect Vector Control MethodAshwani RanaNo ratings yet
- Comparative Study Between Pid and Fuzzy Pid Controller For Speed Control of BLDC Motor IJERTV7IS050098Document6 pagesComparative Study Between Pid and Fuzzy Pid Controller For Speed Control of BLDC Motor IJERTV7IS050098DIVYA PRASOONA CNo ratings yet
- ISA Transactions: Qing Guo, Tian Yu, Dan JiangDocument10 pagesISA Transactions: Qing Guo, Tian Yu, Dan JiangEddy PacheccaNo ratings yet
- Consideration About Problems and Solutions of Speed Estimation Method and Parameter Tuning For Speed-Sensorless Vector Control of IM DrivesDocument8 pagesConsideration About Problems and Solutions of Speed Estimation Method and Parameter Tuning For Speed-Sensorless Vector Control of IM Drivessajs201No ratings yet
- Machines 10 01071 v2Document17 pagesMachines 10 01071 v2jim campbellNo ratings yet
- Pitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllerDocument11 pagesPitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllermaryamNo ratings yet
- Control Steam Turbine Combined Cycle Power Plant Based On Soft ComputingDocument6 pagesControl Steam Turbine Combined Cycle Power Plant Based On Soft Computingleanhhai1080No ratings yet
- Modeling and Control For Stability and Rotation Velocity of A Rotary Inverted Pendulum PDFDocument6 pagesModeling and Control For Stability and Rotation Velocity of A Rotary Inverted Pendulum PDFSerrano García Uriel IvánNo ratings yet
- Review On Field Oriented Control of Indu PDFDocument12 pagesReview On Field Oriented Control of Indu PDFSHADAB SYEDNo ratings yet
- Self Balancing Two Wheeled Robot ReportDocument11 pagesSelf Balancing Two Wheeled Robot ReportMateo Agudelo GarcíaNo ratings yet
- A Passive Control For The Full-Bridge Buck InverterDC Motor SystemDocument5 pagesA Passive Control For The Full-Bridge Buck InverterDC Motor SystemiiscgovindraiNo ratings yet
- A Closed Loop Quasi Optical Dynamic Brak PDFDocument8 pagesA Closed Loop Quasi Optical Dynamic Brak PDFDante FilhoNo ratings yet
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 pagesBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruNo ratings yet
- 2010 MdRozali PID Controller Design For An Industrial HydraulicDocument6 pages2010 MdRozali PID Controller Design For An Industrial Hydraulicnur husnina mohd aliNo ratings yet
- Pid-Ijrest-27201503 Induction Motor DriveDocument13 pagesPid-Ijrest-27201503 Induction Motor DrivewiyatnoNo ratings yet
- Field-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonDocument9 pagesField-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonTrần Tấn LộcNo ratings yet
- 18F032 Assignment 2Document4 pages18F032 Assignment 2Nivas JNo ratings yet
- Evaluation of Two Different Method For Speed Control of DC MotorDocument4 pagesEvaluation of Two Different Method For Speed Control of DC MotorUmer EhsanNo ratings yet
- An044259264 PDFDocument6 pagesAn044259264 PDFmazenNo ratings yet
- Robust Real-Time Control of A Two-Rotor Aerodynamic SystemDocument6 pagesRobust Real-Time Control of A Two-Rotor Aerodynamic SystemsaeedNo ratings yet
- Sensorless Sliding Mode Control of Induction Motor Drives: AbstractDocument6 pagesSensorless Sliding Mode Control of Induction Motor Drives: AbstractSumithra BalakrishnanNo ratings yet
- Damping Hibrid Stepper MotorDocument8 pagesDamping Hibrid Stepper MotorMake_PicNo ratings yet
- Frication Compensation and Disturbance Observer Design For A High Acceleration Precision Direct Drive Motion Stage Li Teng Liu Yanjie Sun LiningDocument5 pagesFrication Compensation and Disturbance Observer Design For A High Acceleration Precision Direct Drive Motion Stage Li Teng Liu Yanjie Sun LiningaliNo ratings yet
- Zhang 2018Document11 pagesZhang 2018Nassima BekhouchaNo ratings yet
- Automatizacion de SistemaDocument6 pagesAutomatizacion de SistemaOscar Vazquez EspinosaNo ratings yet
- Indirect Field Oriented Speed Control of An Induction Motor Drive by Using Pso AlgorithmDocument5 pagesIndirect Field Oriented Speed Control of An Induction Motor Drive by Using Pso AlgorithmĦana RababȜhNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
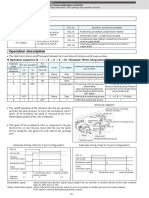
- Daikin Positioning MotorDocument3 pagesDaikin Positioning MotorsandeepNo ratings yet
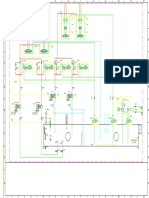
- P B A T P B A T: Heat Load 20000Kcal/HrDocument1 pageP B A T P B A T: Heat Load 20000Kcal/HrsandeepNo ratings yet
- User Manual Canopen sgh10 PDFDocument53 pagesUser Manual Canopen sgh10 PDFsandeepNo ratings yet
- Product Range: Trelleborg Se Aling SolutionsDocument39 pagesProduct Range: Trelleborg Se Aling SolutionssandeepNo ratings yet
- O Ring GB en PDFDocument143 pagesO Ring GB en PDFsandeepNo ratings yet
- 2/2 Solenoid Cartridge Valve, Size 10: 1 DescriptionDocument5 pages2/2 Solenoid Cartridge Valve, Size 10: 1 Descriptionsandeep100% (1)
- Load Cell ActuatorsDocument2 pagesLoad Cell Actuatorssandeep100% (1)
- Buckling: E Modulus of Elasticity in N/MM L Geometrical Moment of Inertia in MMDocument2 pagesBuckling: E Modulus of Elasticity in N/MM L Geometrical Moment of Inertia in MMsandeepNo ratings yet
- Is 11146 (1999) - Iso 7181 (1991)Document6 pagesIs 11146 (1999) - Iso 7181 (1991)sandeepNo ratings yet
- Shridhan VfsDocument4 pagesShridhan VfssandeepNo ratings yet
- Buckling SDocument49 pagesBuckling SsandeepNo ratings yet
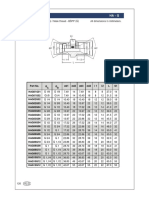
- Hose Adaptors Ha - G: Male Thread - BSPP (G) / Male Thread - BSPP (G) All Dimensions in MillimetersDocument1 pageHose Adaptors Ha - G: Male Thread - BSPP (G) / Male Thread - BSPP (G) All Dimensions in MillimeterssandeepNo ratings yet
- Eo Weld Fitting 4100e001Document11 pagesEo Weld Fitting 4100e001sandeepNo ratings yet
- BS121FE BS121FE: User Manual True Wireless EarbudsDocument3 pagesBS121FE BS121FE: User Manual True Wireless EarbudsGiancarlo LasagnaNo ratings yet
- Descriptio: FeaturesDocument8 pagesDescriptio: FeaturesAlfonso BlancoNo ratings yet
- HMI Cab 49 ProfaceDocument1 pageHMI Cab 49 ProfaceTung HoangNo ratings yet
- Mesh Analysis: Find The Branch Currents Using Mesh AnalysisDocument4 pagesMesh Analysis: Find The Branch Currents Using Mesh AnalysisJiya AssijaNo ratings yet
- Ecolite™ Core Series: Lampfree. Mercuryfree. StressfreeDocument1 pageEcolite™ Core Series: Lampfree. Mercuryfree. StressfreeJoseNo ratings yet
- Physics Investigatory Project On Logic GDocument19 pagesPhysics Investigatory Project On Logic GSaumendu NeogiNo ratings yet
- Electrical Safety First - Best Practice Guide 1 Issue 3Document16 pagesElectrical Safety First - Best Practice Guide 1 Issue 3Kishan RamNo ratings yet
- Exl-S1 Manual 10H52226UM60 2017Document111 pagesExl-S1 Manual 10H52226UM60 2017Ngoc Vo DaiNo ratings yet
- Design of High Performance Radix-4 and Radix-8 Multiplier Using Verilog HDLDocument11 pagesDesign of High Performance Radix-4 and Radix-8 Multiplier Using Verilog HDLCharan UkkuNo ratings yet
- ACS759 DatasheetDocument20 pagesACS759 DatasheetVenkateswarlu KappalaNo ratings yet
- Reverse Power RelayDocument4 pagesReverse Power RelayJadeja KuladipsinhNo ratings yet
- KENWOOD TS 870S Mods1 SchematicDocument6 pagesKENWOOD TS 870S Mods1 SchematicLuis CarlosNo ratings yet
- 2013 Cc111 Int Comp Sheet 1 No AnswerDocument8 pages2013 Cc111 Int Comp Sheet 1 No AnswerSara El-GendyNo ratings yet
- 800/900 MHZ Dual Polarization Panel Antenna: Product Data Sheet CPX310DDocument1 page800/900 MHZ Dual Polarization Panel Antenna: Product Data Sheet CPX310DSyed Muhammad KamranNo ratings yet
- Projeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosDocument11 pagesProjeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosTboy SkyghostNo ratings yet
- Trinaflex WhitepaperDocument8 pagesTrinaflex WhitepaperBùi Văn NhẫnNo ratings yet
- AEG Energy Storage AS-BSL1-8000 12000 Installation Instructions ENDocument32 pagesAEG Energy Storage AS-BSL1-8000 12000 Installation Instructions ENSxplanetNo ratings yet
- Gen Diff ProtpdfDocument55 pagesGen Diff ProtpdfAyan MajiNo ratings yet
- Network Analysis (ECE - 2103)Document3 pagesNetwork Analysis (ECE - 2103)Preeti SharmaNo ratings yet
- Industrial Diesel Generator Set - 50 HZ: KOHLER SDMO Premium QualityDocument7 pagesIndustrial Diesel Generator Set - 50 HZ: KOHLER SDMO Premium QualityJoko SusiloNo ratings yet
- DEL Lab Manual - Experiment 6Document1 pageDEL Lab Manual - Experiment 6sara michikoNo ratings yet
- ATV312 ManualDocument80 pagesATV312 ManualLuks AcostaNo ratings yet
- EE1/EIE1: Introduction To Signals and Communications MATLAB ExperimentsDocument9 pagesEE1/EIE1: Introduction To Signals and Communications MATLAB ExperimentsHemanth pNo ratings yet
- Technical Information Prosonic M FMU40, FMU41, FMU42, FMU43, FMU44Document56 pagesTechnical Information Prosonic M FMU40, FMU41, FMU42, FMU43, FMU44johnf2328No ratings yet