You might also like
- UuDocument48 pagesUuSHYAM SUNDAR OJHA SHYAMNo ratings yet
- Single Phase TransformerDocument6 pagesSingle Phase TransformersivaiahjettiNo ratings yet
- S6 PE Lab Manual 2018 MATLAB PDFDocument27 pagesS6 PE Lab Manual 2018 MATLAB PDFhariNo ratings yet
- Transformers: How They Work and Transformer TestsDocument36 pagesTransformers: How They Work and Transformer TestsdurgaraoNo ratings yet
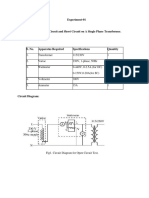
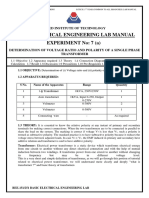
- Aim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDocument4 pagesAim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDevansh MankarNo ratings yet
- Lab 2 - Fa16-Bet-056 - Muneeb UllahDocument9 pagesLab 2 - Fa16-Bet-056 - Muneeb UllahPel Colour onNo ratings yet
- Measuring Voltage, Current and Power in a TransformerDocument8 pagesMeasuring Voltage, Current and Power in a TransformerAngelina JolieNo ratings yet
- ETlab Manual 2Document16 pagesETlab Manual 2jyoti maheshNo ratings yet
- Loaded Transformer Equivalent CircuitDocument8 pagesLoaded Transformer Equivalent CircuitM7MD ACADEMIANo ratings yet
- Lecture6 Transformer PDFDocument50 pagesLecture6 Transformer PDFAhmad Akram100% (1)
- Beeel 1a2Document12 pagesBeeel 1a2Dr. S MuthukumarNo ratings yet
- Electrical Machines EE-260: Instructor: DR Mehmood AlamDocument31 pagesElectrical Machines EE-260: Instructor: DR Mehmood AlamSaif Ur RehmanNo ratings yet
- Experiment-6 Single Phase AC Voltage ControllerDocument14 pagesExperiment-6 Single Phase AC Voltage ControllerBobNo ratings yet
- Analog Electronics Lab MANUALDocument70 pagesAnalog Electronics Lab MANUALSenthil KumarNo ratings yet
- Machine LabDocument7 pagesMachine LabNurjahan-Ara StudentNo ratings yet
- Machine Lab IIIDocument9 pagesMachine Lab IIIMengistu TarkoNo ratings yet
- Electrical Machines Lab Manual (DC Machines and Transformer)Document34 pagesElectrical Machines Lab Manual (DC Machines and Transformer)AmulyaNo ratings yet
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Experiment_7Document4 pagesExperiment_7Swaroop MallickNo ratings yet
- Electro PrincipeDocument50 pagesElectro PrincipeOjog Ciprian AlinNo ratings yet
- University of Asia Pacific: Department-EEE Course Code - EEE-204 Course Name - Machine - IDocument20 pagesUniversity of Asia Pacific: Department-EEE Course Code - EEE-204 Course Name - Machine - InayonNo ratings yet
- ECE220A Half-Wave Rectifier LabDocument6 pagesECE220A Half-Wave Rectifier LabCassandra Chrystel CalicdanNo ratings yet
- E1.08 (2016) Single Phase TransformerDocument5 pagesE1.08 (2016) Single Phase TransformerDalilahNo ratings yet
- Electric Machines LaboratoryDocument44 pagesElectric Machines Laboratory11mustafa.mNo ratings yet
- OC & SC Test On 1-Phase TransformerDocument5 pagesOC & SC Test On 1-Phase TransformerChaitanyavaddigalaNo ratings yet
- Experiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Document10 pagesExperiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Akshit VSNo ratings yet
- Study of Series and Parallel Circuits: Power Electronics 08-EE-130Document27 pagesStudy of Series and Parallel Circuits: Power Electronics 08-EE-130Muhammad AwaisNo ratings yet
- Irfan Munir: Name: Roll No: 15CE25 Lab Instructor's Signature:........... Date...................Document3 pagesIrfan Munir: Name: Roll No: 15CE25 Lab Instructor's Signature:........... Date...................Irfan MunirNo ratings yet
- Department of Electrical and Electronics Engineering: List of Experiments SL - No Name of The Experiment Page NoDocument51 pagesDepartment of Electrical and Electronics Engineering: List of Experiments SL - No Name of The Experiment Page Nosuresh270No ratings yet
- Class 12 Maharashtra Board EM2 JournalDocument26 pagesClass 12 Maharashtra Board EM2 JournalAkshansh DwivediNo ratings yet
- Ext 5Document5 pagesExt 5AnanthuNo ratings yet
- Observe Output Voltage of Buck & Boost ConvertersDocument7 pagesObserve Output Voltage of Buck & Boost ConvertersAnshuman DebataNo ratings yet
- AutotransformerDocument26 pagesAutotransformerMonika SharmaNo ratings yet
- Ee07lab Experiment AutotransformerDocument5 pagesEe07lab Experiment AutotransformerPido, Patricia LaineNo ratings yet
- Voltage Regulation of TransformerDocument6 pagesVoltage Regulation of TransformerMd Nahid HasanNo ratings yet
- Em-Ii ExperimentDocument19 pagesEm-Ii Experimentprince rajNo ratings yet
- Chapt 1 - Dee30043-2Document30 pagesChapt 1 - Dee30043-2AmmyNo ratings yet
- Expt 8,9Document7 pagesExpt 8,9HARSH RAINo ratings yet
- Jawaharlal Nehru Technological University Anantapur College of Engineering Lab Report on Electrical Machines ExperimentsDocument25 pagesJawaharlal Nehru Technological University Anantapur College of Engineering Lab Report on Electrical Machines ExperimentsSudharshan ChennupalliNo ratings yet
- Ps 1Document11 pagesPs 1pandabk00No ratings yet
- SKEE2413 - Chapter 1 Part 2 Transformer-1Document80 pagesSKEE2413 - Chapter 1 Part 2 Transformer-1MohamadIsaNo ratings yet
- LLC Resonant Converter for 48V to 0.9V VRMDocument7 pagesLLC Resonant Converter for 48V to 0.9V VRMhoàng tônNo ratings yet
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Document7 pagesExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghNo ratings yet
- Expt 1 DC Machine Using SimulinkDocument10 pagesExpt 1 DC Machine Using SimulinkGG wpNo ratings yet
- Chapter 5 - TransformerDocument84 pagesChapter 5 - TransformerZulfikri Zulkifli50% (2)
- Modified Electron Device Lab ManualDocument73 pagesModified Electron Device Lab ManualVIVEK BHOGAR (RA2011030010136)No ratings yet
- Diode Lab: Half-Wave and Full-Wave Rectifier CircuitsDocument11 pagesDiode Lab: Half-Wave and Full-Wave Rectifier CircuitsA. AlghamdiNo ratings yet
- Pe Lab ManualDocument53 pagesPe Lab ManualKada JashNo ratings yet
- Ee TransformersDocument24 pagesEe TransformersAnonymous 1VhXp1No ratings yet
- Open Circuit and Short Circuit Test On Single Phase TransformerDocument5 pagesOpen Circuit and Short Circuit Test On Single Phase TransformerPratap SinghNo ratings yet
- 1 Half-Wave Rectifier With R LoadDocument18 pages1 Half-Wave Rectifier With R LoadKARMUGHILLAAN MANIMARAN STUDENTNo ratings yet
- Electro PrincipeDocument58 pagesElectro PrincipeShahzaid AhmadNo ratings yet
- Lab 4 (1903069)Document4 pagesLab 4 (1903069)Tahsin Zaman TalhaNo ratings yet
- Half Wave Rectifier Physics Project PDF VinilDocument12 pagesHalf Wave Rectifier Physics Project PDF Vinilteamboys536No ratings yet
- Lab 1Document32 pagesLab 1Adhithyan KzhlmNo ratings yet
- Ism LabDocument67 pagesIsm LabpadmavathiNo ratings yet
- Assignment 2Document2 pagesAssignment 2Shofol BiswasNo ratings yet
- Assignment 2Document3 pagesAssignment 2Shofol BiswasNo ratings yet
- Assignment 1Document4 pagesAssignment 1Shofol BiswasNo ratings yet
- IELTS Writing Task-1 Template 8/9Document2 pagesIELTS Writing Task-1 Template 8/9Shofol Biswas100% (1)
- ECE Syllabus PDFDocument38 pagesECE Syllabus PDFShofol BiswasNo ratings yet
- HC Sr04Document4 pagesHC Sr04Shofol Biswas100% (1)
- UL Scopes For StandardsDocument22 pagesUL Scopes For StandardsAndres Giraldo Moreno50% (6)
- Power System ProtectionDocument2 pagesPower System ProtectionEkramul Khan ChowdhuryNo ratings yet
- 11.multistage AmplifiersDocument17 pages11.multistage AmplifiersNitin Mehta - 18-BEC-030No ratings yet
- Objective QuestionsUNIT - 3&4Document17 pagesObjective QuestionsUNIT - 3&4Omkar Shete50% (2)
- 161201ABB EMF-E - ENG (Dependable Accuracy) HI-RES A4Document2 pages161201ABB EMF-E - ENG (Dependable Accuracy) HI-RES A4Senthil KumarNo ratings yet
- B. Tech. Electrical EngineeringDocument66 pagesB. Tech. Electrical Engineeringmohitsingh421421No ratings yet
- ABB Transformers Protection CourseDocument56 pagesABB Transformers Protection CourseWalid SonjiNo ratings yet
- Simple Pure Sine Wave Inverter Circuit - 500 Watt Pure Sine PDFDocument22 pagesSimple Pure Sine Wave Inverter Circuit - 500 Watt Pure Sine PDFAnonymous 4YqpgKkSR100% (2)
- Prisma Med - Schneider Electric - or SwitchboardDocument20 pagesPrisma Med - Schneider Electric - or SwitchboardAna RuxandraNo ratings yet
- Multi Tap Transformer ProjectDocument27 pagesMulti Tap Transformer ProjectELLAINE DE CLARONo ratings yet
- Integrated Smart Module Tapmotion® Ed100S-Ism: SupplementDocument74 pagesIntegrated Smart Module Tapmotion® Ed100S-Ism: SupplementJohn Fredy Bautista ReyesNo ratings yet
- Electronics CircuitDocument0 pagesElectronics Circuitwww.bhawesh.com.npNo ratings yet
- ANSI MV TechTopicsCatalogDocument283 pagesANSI MV TechTopicsCatalogCommercial OneNo ratings yet
- Short-Circuit Calculations - The Easy WayDocument3 pagesShort-Circuit Calculations - The Easy WaymshahidshaukatNo ratings yet
- AP DU STANDARDS - GUIDELINES For LINES - POLES VER 1.0.4Document44 pagesAP DU STANDARDS - GUIDELINES For LINES - POLES VER 1.0.4Evander Sasarita MonteroNo ratings yet
- PRAP-001A Transformer Monitoring Application NoteDocument7 pagesPRAP-001A Transformer Monitoring Application Notegaurang1111No ratings yet
- Pages From Asme Sec Ix 2017-8Document1 pagePages From Asme Sec Ix 2017-8Akhtar AnsariNo ratings yet
- T7-SCR Power Regulator Use ManualDocument48 pagesT7-SCR Power Regulator Use ManualJhon CarterNo ratings yet
- Spectra II Data Sheet - Atg UV Technology - Rev 2 - 2018Document1 pageSpectra II Data Sheet - Atg UV Technology - Rev 2 - 2018nattaponamornNo ratings yet
- Per Unit CalculationsDocument7 pagesPer Unit Calculationsanbuelectrical100% (1)
- Cutler-Hammer VacClad-W Arc Resistant Switchgear: Innovative Technology for SafetyDocument12 pagesCutler-Hammer VacClad-W Arc Resistant Switchgear: Innovative Technology for SafetyandrewNo ratings yet
- Measure Vibration Sensor Resistance Probe Bently NevadaDocument4 pagesMeasure Vibration Sensor Resistance Probe Bently Nevadaابزار دقیقNo ratings yet
- High Voltage DC Generation Using Marx Generator: IjarcceDocument5 pagesHigh Voltage DC Generation Using Marx Generator: Ijarccehani dalwadiNo ratings yet
- STC-GS-1 Train Lighting PDFDocument821 pagesSTC-GS-1 Train Lighting PDFLakshmiVishwanathan100% (2)
- Industrial Calculations: Feeder LoadsDocument2 pagesIndustrial Calculations: Feeder LoadsHassenNo ratings yet
- Anand Transformers Company ProfileDocument3 pagesAnand Transformers Company ProfileNamit GuptaNo ratings yet
- International Standard: Norme InternationaleDocument19 pagesInternational Standard: Norme InternationaleGnanavel GNo ratings yet
- MV7000 User Manual Section5 Protection 4MKG0015 Rev C PDFDocument44 pagesMV7000 User Manual Section5 Protection 4MKG0015 Rev C PDFPriscilla Higor Giurizatto100% (1)
- Power Transformer Design PrinciplesDocument69 pagesPower Transformer Design PrinciplesSahmat AhsaNo ratings yet
- Applied Protective Relaying - Westinghouse PDFDocument457 pagesApplied Protective Relaying - Westinghouse PDFdennisplaza89% (9)