You might also like
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Accident Investigation Report: Investigator's InformationDocument2 pagesAccident Investigation Report: Investigator's InformationJack PNo ratings yet
- ADL 12 Business Laws V4Document26 pagesADL 12 Business Laws V4Aditya BhatNo ratings yet
- Famous Landmarks Vocabulary Cards Classroom Posters Conversation Topics Dialogs Flas - 72196Document1 pageFamous Landmarks Vocabulary Cards Classroom Posters Conversation Topics Dialogs Flas - 72196lolita digiacomo100% (1)
- Block Diagram ReductionDocument14 pagesBlock Diagram ReductionJamal Mesidor100% (2)
- To Perform A Block Diagram Reduction Using MATLAB - Matlab ExamplesDocument5 pagesTo Perform A Block Diagram Reduction Using MATLAB - Matlab Examplesdanycg85No ratings yet
- Control SystemsDocument32 pagesControl Systemsselvi0412100% (1)
- Industrial Training Report Abbaz Advisory Sdn. BHDDocument47 pagesIndustrial Training Report Abbaz Advisory Sdn. BHDMohamad Aarif Fitrie Shafii100% (1)
- Quantity Calculations - LPG and Chemical GasesDocument35 pagesQuantity Calculations - LPG and Chemical GasesOsama SalamaNo ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Orca Share Media1676505355563 7031773118863093717Document42 pagesOrca Share Media1676505355563 7031773118863093717Charls Aron ReyesNo ratings yet
- Control ReportDocument15 pagesControl ReportKenshow Large50% (2)
- Efficacy of DUMBCANE (Dieffenbachia Picta Schott.) Stem Extracts AGAINST GOLDEN APPLE SNAIL (Pomacea Canaliculata L.)Document3 pagesEfficacy of DUMBCANE (Dieffenbachia Picta Schott.) Stem Extracts AGAINST GOLDEN APPLE SNAIL (Pomacea Canaliculata L.)Mary rose YenyenNo ratings yet
- Block Diagrams Reduction PDFDocument7 pagesBlock Diagrams Reduction PDFSheroz Rajab Ali SoomroNo ratings yet
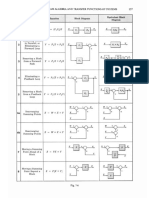
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsDocument6 pagesCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliNo ratings yet
- Chapter 10Document93 pagesChapter 10Carraan Dandeettirra Caala Altakkatakka100% (1)
- Prob DBDocument3 pagesProb DBSandyArevaloNo ratings yet
- Lec 45Document73 pagesLec 45api-247714257No ratings yet
- BlockDiagram and Signal Flow GraphsDocument29 pagesBlockDiagram and Signal Flow GraphsDienies TorresNo ratings yet
- Control System Analysis and Design: Karen WillcoxDocument12 pagesControl System Analysis and Design: Karen Willcoxkhannasir1No ratings yet
- Lecture 4Document13 pagesLecture 4Syed Hussain Akbar MosviNo ratings yet
- MSD2Document47 pagesMSD2moeNo ratings yet
- Block Diagrams EnotesDocument7 pagesBlock Diagrams Enotespatel_vicky87No ratings yet
- 1 Lecture Block Diagram Representation of Control SystemsDocument65 pages1 Lecture Block Diagram Representation of Control SystemsSuyash Dahake VlogsNo ratings yet
- Discretization Methods of Fractional Parallel PIDDocument4 pagesDiscretization Methods of Fractional Parallel PIDBaherNo ratings yet
- Other Control Specifications: L/JP BDocument24 pagesOther Control Specifications: L/JP BPetrus FendiyantoNo ratings yet
- Sub. Name: Ae6505 Control Engineering Answer Key Semester/Year: V / Iii Cat-1 Part-ADocument12 pagesSub. Name: Ae6505 Control Engineering Answer Key Semester/Year: V / Iii Cat-1 Part-AgallantprakashNo ratings yet
- Chapter 5 Reduction of Multiple SubsystemsDocument37 pagesChapter 5 Reduction of Multiple SubsystemsEugine BalomagaNo ratings yet
- Feedback and Control System Module - 19Document28 pagesFeedback and Control System Module - 19AkiHiro San CarcedoNo ratings yet
- TOPIC 3 - Control-EngineeringDocument35 pagesTOPIC 3 - Control-EngineeringCllyan ReyesNo ratings yet
- Control Lab Experiment 2Document3 pagesControl Lab Experiment 2AnasElgaoodNo ratings yet
- 003 ME31002 - Block Diagram-2021febDocument54 pages003 ME31002 - Block Diagram-2021febShek Yu LaiNo ratings yet
- Analogy RLC en Mass Spring Dash PotDocument26 pagesAnalogy RLC en Mass Spring Dash Potjef_aernoutsNo ratings yet
- Control System 1 PDFDocument72 pagesControl System 1 PDFElangoNo ratings yet
- ECE 43 Module 7 - Block Diagram AlgebraDocument34 pagesECE 43 Module 7 - Block Diagram Algebrafrancisemil.vistaNo ratings yet
- Multiobjective Control Systems Design by Genetic AlgorithmsDocument6 pagesMultiobjective Control Systems Design by Genetic AlgorithmsnainaNo ratings yet
- LG Embedded Jan09Document5 pagesLG Embedded Jan09Junaid AhmadNo ratings yet
- Fuzzy Control Distillation ColumnDocument5 pagesFuzzy Control Distillation ColumnhardmanpersonNo ratings yet
- Controls Finals ResearchDocument15 pagesControls Finals ResearchRenz Xynor Liotib CadizNo ratings yet
- 1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Document25 pages1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Md.Atikur RahmanNo ratings yet
- Lab # 8 Control SystemDocument10 pagesLab # 8 Control SystemZabeehullahmiakhailNo ratings yet
- C.S Unit - 2Document22 pagesC.S Unit - 2Rajendar PonagantiNo ratings yet
- Block DiagramDocument12 pagesBlock DiagramJohn Cedrik RetardoNo ratings yet
- Home Work PDFDocument3 pagesHome Work PDFsreekanthaNo ratings yet
- Home WorkDocument3 pagesHome Worksreekantha0% (1)
- Old Question Paper Control SystemsDocument7 pagesOld Question Paper Control SystemsSatendra KushwahaNo ratings yet
- Block Diagram and Signal FlowDocument23 pagesBlock Diagram and Signal Floweltn s.No ratings yet
- Session F4H: Block Diagram in Undergraduate Engineering Courses Other Than Control SystemsDocument5 pagesSession F4H: Block Diagram in Undergraduate Engineering Courses Other Than Control SystemsmailmadoNo ratings yet
- Block DiagramDocument75 pagesBlock DiagramJane Erestain BuenaobraNo ratings yet
- TOPIC 4.0 The Dynamic Behavior of Feedback - Controlled ProcessesDocument7 pagesTOPIC 4.0 The Dynamic Behavior of Feedback - Controlled ProcessesByron MawoyoNo ratings yet
- Sloa077 PDFDocument18 pagesSloa077 PDFRaymundo CorderoNo ratings yet
- Lab # 8 SolvedDocument10 pagesLab # 8 SolvedZabeehullahmiakhailNo ratings yet
- Transfer Functions From Block Diagrams and Signal Flow ChartDocument10 pagesTransfer Functions From Block Diagrams and Signal Flow ChartYzza Veah EsquivelNo ratings yet
- علي احمد جباره تقرير تقرير مختبر الكونترولDocument6 pagesعلي احمد جباره تقرير تقرير مختبر الكونترولسيد نعيمNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Teknik Kendali: Respons Transient Dan Respons Steady StateDocument15 pagesTeknik Kendali: Respons Transient Dan Respons Steady StaterahmanNo ratings yet
- Lab 5 ControlDocument6 pagesLab 5 ControlAyaz AhmadNo ratings yet
- Lab 6 Filter StructureDocument9 pagesLab 6 Filter StructureWaleed SaeedNo ratings yet
- Implementation of A Lag-Lead Compensator For RobotsDocument6 pagesImplementation of A Lag-Lead Compensator For Robotsfullstop1027_4915190No ratings yet
- Zahra AbdulHameed ShukrDocument11 pagesZahra AbdulHameed ShukrTana AzeezNo ratings yet
- Reduction of Multiple SubsystemsDocument52 pagesReduction of Multiple SubsystemsabdulNo ratings yet
- L-15 (SS) (Iac) ( (Ee) Nptel)Document11 pagesL-15 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- Study, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofDocument10 pagesStudy, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofTana AzeezNo ratings yet
- Unit 7 and 8Document32 pagesUnit 7 and 8Alton S H ChenNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument15 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Bài Kt 2 Biên Dịch 1-LiêmDocument10 pagesBài Kt 2 Biên Dịch 1-LiêmNguyen Loan100% (1)
- JVC HR-S6970AA Service ManualDocument61 pagesJVC HR-S6970AA Service ManualPriyantha GanegodaNo ratings yet
- Ambitious TheoryDocument14 pagesAmbitious TheoryPhanilla IceCreamNo ratings yet
- GRADE 9-National Reading ProgramDocument2 pagesGRADE 9-National Reading ProgramJulius Bayaga100% (1)
- Business Partner Application Form: Bintang Arif Kurniawan 08119002384Document1 pageBusiness Partner Application Form: Bintang Arif Kurniawan 08119002384Bintang ArifNo ratings yet
- ReadmeDocument6 pagesReadmecamiloNo ratings yet
- Syllabus ChemDocument5 pagesSyllabus ChemDGA GAMINGNo ratings yet
- FAC1601-partnerships - LiquidationDocument12 pagesFAC1601-partnerships - Liquidationtommy tazvityaNo ratings yet
- Road EstimateDocument15 pagesRoad EstimateRAJ KNo ratings yet
- Digital Finance and FinTech, Current Research and Future Research DirectionsDocument44 pagesDigital Finance and FinTech, Current Research and Future Research DirectionsShambachew Omer HussenNo ratings yet
- Knowledge RepresentationDocument14 pagesKnowledge RepresentationGonibala LandyNo ratings yet
- Mathematical LanguageDocument9 pagesMathematical Languagejrqagua00332No ratings yet
- A Study On Customer Awareness and Satisfaction Towards Flipkart Shopping - With Special Reference To Pollachi TalukDocument4 pagesA Study On Customer Awareness and Satisfaction Towards Flipkart Shopping - With Special Reference To Pollachi TalukMukul SomgadeNo ratings yet
- Brand ImageDocument2 pagesBrand Imagedollys59No ratings yet
- Legal Writing in Plain EnglishDocument4 pagesLegal Writing in Plain EnglishK60 Đặng Phương NhiNo ratings yet
- SosDocument6 pagesSosVikramNo ratings yet
- 03-Part C3-3 Spec Corrosion ProtectionDocument14 pages03-Part C3-3 Spec Corrosion ProtectionThandabantu MagengeleleNo ratings yet
- Revealed Comparative AdvantageDocument5 pagesRevealed Comparative AdvantageiamrahulkumarNo ratings yet
- Reasearch ProposalDocument9 pagesReasearch Proposalamel amoulaNo ratings yet
- No TitleDocument6 pagesNo Titlehwh8w6jmzsNo ratings yet
- Full Download Social Problems in A Diverse Society 6th Edition Diana Kendall Test BankDocument35 pagesFull Download Social Problems in A Diverse Society 6th Edition Diana Kendall Test Bankpanorarubius100% (29)
- AGRI 32 Exer 1Document2 pagesAGRI 32 Exer 1ian kenneth badongNo ratings yet
- Dual 15A/Single 30A Step-Down Power Module: ISL8225MDocument34 pagesDual 15A/Single 30A Step-Down Power Module: ISL8225MAnonymous QakmLc3kTINo ratings yet