You might also like
- Kwakernaak Linear Optimal Control Systems PDFDocument595 pagesKwakernaak Linear Optimal Control Systems PDFMarko Glavas100% (1)
- Business Paradigms Discovering The Future PDFDocument20 pagesBusiness Paradigms Discovering The Future PDFAndray Jamil Almakhadmeh100% (1)
- Optimal Control: Linear Quadratic MethodsFrom EverandOptimal Control: Linear Quadratic MethodsRating: 4 out of 5 stars4/5 (2)
- Optimal Control: An Introduction to the Theory and Its ApplicationsFrom EverandOptimal Control: An Introduction to the Theory and Its ApplicationsRating: 4.5 out of 5 stars4.5/5 (2)
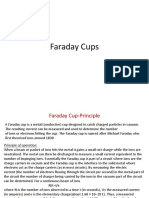
- Faraday CupsDocument10 pagesFaraday CupsAshish SharmaNo ratings yet
- Ted 913R Advanced Control Systems-2Document3 pagesTed 913R Advanced Control Systems-2Solomon kiplimoNo ratings yet
- Ae483 SyllabusDocument1 pageAe483 SyllabusSiyar JoyendaNo ratings yet
- ELL 802: Adaptive and Learning ControlDocument5 pagesELL 802: Adaptive and Learning Controlpritesh patelNo ratings yet
- Course OutlineDocument2 pagesCourse OutlineMagarsaa Qana'iiNo ratings yet
- Syllabus EEE4018 Advanced Control TheoryDocument2 pagesSyllabus EEE4018 Advanced Control TheoryKshitiz SrivastavaNo ratings yet
- Control Systems Course ObjectivesDocument2 pagesControl Systems Course ObjectivesVinopraba ThirumavalavanNo ratings yet
- Advance Control SystemDocument3 pagesAdvance Control Systemcoep05100% (1)
- 104 / M A R C H 19 7 3: Transactions of The A& EDocument1 page104 / M A R C H 19 7 3: Transactions of The A& EYtrais 28No ratings yet
- Annex 1. Syllabus of The First Year ModulesDocument38 pagesAnnex 1. Syllabus of The First Year Modulesoliver6626No ratings yet
- Mirpur University of Science and Technology (Must), Mirpur Ajk Department of Electrical EngineeringDocument9 pagesMirpur University of Science and Technology (Must), Mirpur Ajk Department of Electrical EngineeringUsama IkramNo ratings yet
- CS R-16 SyllabusDocument3 pagesCS R-16 SyllabusSai tejaswiNo ratings yet
- EEL 4657 Linear Control SystemsDocument7 pagesEEL 4657 Linear Control SystemsRosemond FabienNo ratings yet
- Control SystemsDocument2 pagesControl SystemsrahulwasthereNo ratings yet
- syllabus-ELG7113MCG5470 w2024Document4 pagessyllabus-ELG7113MCG5470 w2024Adil MajeedNo ratings yet
- A Combined Vibrations and Controls Course For Mechanical EngineeringDocument6 pagesA Combined Vibrations and Controls Course For Mechanical EngineeringchikeluNo ratings yet
- Imaro M1 2019Document25 pagesImaro M1 2019Adithya RaoNo ratings yet
- Controls SyllabusDocument2 pagesControls SyllabusArshiya Kousar MNo ratings yet
- CSD Syllabus COsDocument2 pagesCSD Syllabus COsBharath PulavarthiNo ratings yet
- Nonlinear Control Design-EE 573 Course OutlineDocument1 pageNonlinear Control Design-EE 573 Course OutlineSuaib DanishNo ratings yet
- Advanced Control SystemDocument1 pageAdvanced Control Systemsaxenamohit_853663No ratings yet
- Linear Sys Lect1Document17 pagesLinear Sys Lect1Ali HassanNo ratings yet
- Control Systems - CourseDocument4 pagesControl Systems - CourseSourav ChatterjeeNo ratings yet
- HomeWork 1980Document2 pagesHomeWork 1980Hamid Reza JilanchiNo ratings yet
- Course OutlineDocument2 pagesCourse OutlinearifulNo ratings yet
- EE5104 Adaptive Control Systems/ EE6104 Adaptive Control Systems (Advanced)Document5 pagesEE5104 Adaptive Control Systems/ EE6104 Adaptive Control Systems (Advanced)sujingthetNo ratings yet
- CS SyllabusDocument2 pagesCS SyllabusEEE ACEECNo ratings yet
- Mmha506l - Advanced-Control-Systems - TH - 1.0 - 73 - Mmha506l - 67 AcpDocument2 pagesMmha506l - Advanced-Control-Systems - TH - 1.0 - 73 - Mmha506l - 67 AcpSoumi RayNo ratings yet
- Engineering: University of Mumbai Class: B. E. Branch: Instrumentation Semester: VIIDocument59 pagesEngineering: University of Mumbai Class: B. E. Branch: Instrumentation Semester: VIIAjinkyaPatilNo ratings yet
- ME780A 2016 Fall OutlineDocument4 pagesME780A 2016 Fall OutlinetrebeheiramNo ratings yet
- 2IC421 Control - SystemDocument2 pages2IC421 Control - SystemyashasviNo ratings yet
- Course Number: Course Title: Credit Hours: Instructor:: Nd38@aub - Edu.lbDocument2 pagesCourse Number: Course Title: Credit Hours: Instructor:: Nd38@aub - Edu.lbValiollah GhaffariNo ratings yet
- Automatic Control Systems With MATLAB, 2nd Edition (S. Palani)Document922 pagesAutomatic Control Systems With MATLAB, 2nd Edition (S. Palani)biobalamtechNo ratings yet
- Robust Control Theory Workshop Rev2Document3 pagesRobust Control Theory Workshop Rev2totoler100% (1)
- Robust ControlDocument2 pagesRobust ControlcarlogarroNo ratings yet
- Feedback Control Systems Mit (Complete)Document609 pagesFeedback Control Systems Mit (Complete)Mario A Qui100% (1)
- Gujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Document3 pagesGujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Mulu GirmayNo ratings yet
- Book Review: International Journal of Robust and Nonlinear Control Int. J. Robust Nonlinear Control 2008 18:111-112Document2 pagesBook Review: International Journal of Robust and Nonlinear Control Int. J. Robust Nonlinear Control 2008 18:111-112rubis tarekNo ratings yet
- s7 InstruDocument16 pagess7 InstruManas Sawant100% (2)
- Linear Optimal Control SystemsDocument22 pagesLinear Optimal Control SystemsalvandresNo ratings yet
- Eme 4433 - Control and System Engineering: Dr. Shamini JanasekaranDocument6 pagesEme 4433 - Control and System Engineering: Dr. Shamini JanasekaranAtif SyedNo ratings yet
- Syll Ae3531Document2 pagesSyll Ae3531Chandraveer SinghNo ratings yet
- INEL5505Document2 pagesINEL5505Jaime MendezNo ratings yet
- Ece2010 Control-Systems Eth 2.1 49 Ece2010 14Document2 pagesEce2010 Control-Systems Eth 2.1 49 Ece2010 14sartgNo ratings yet
- Control Systems Course OutlineDocument3 pagesControl Systems Course OutlineWaqar AliNo ratings yet
- Learning-Based Adaptive Control: An Extremum Seeking Approach – Theory and ApplicationsFrom EverandLearning-Based Adaptive Control: An Extremum Seeking Approach – Theory and ApplicationsNo ratings yet
- Course Plan and The Evaluation PlanDocument2 pagesCourse Plan and The Evaluation PlanKatari KiranNo ratings yet
- Completed Syllabus For 5-6 Semester ETCE-2-1Document25 pagesCompleted Syllabus For 5-6 Semester ETCE-2-1AnnybanNo ratings yet
- CEPhgnacs EE376 Ugeven 23Document2 pagesCEPhgnacs EE376 Ugeven 23Meet Shah.No ratings yet
- Linear Contro System PDFDocument595 pagesLinear Contro System PDFعبد الحق الساسيNo ratings yet
- Syllabus ELEG5423 Optimal ControlDocument3 pagesSyllabus ELEG5423 Optimal ControlDavid ZhongNo ratings yet
- BEEE303L - CONTROL-SYSTEMS - TH - 1.0 - 67 - Control SystemsDocument3 pagesBEEE303L - CONTROL-SYSTEMS - TH - 1.0 - 67 - Control SystemsMohit SubramaniamNo ratings yet
- Automatic Control (ME1401)Document2 pagesAutomatic Control (ME1401)Mehroos AliNo ratings yet
- DP by Bellman Functional EquationDocument296 pagesDP by Bellman Functional Equation.cadeau01No ratings yet
- CONTROL SYSTEMS (Core Subject) B.E., VI Semester, Electrical and Electronics Engineering (As Per Choice Based Credit System (CBCS) Scheme)Document2 pagesCONTROL SYSTEMS (Core Subject) B.E., VI Semester, Electrical and Electronics Engineering (As Per Choice Based Credit System (CBCS) Scheme)tabassNo ratings yet
- EEE 482 Introduction To State-Space Methods (3) (F)Document2 pagesEEE 482 Introduction To State-Space Methods (3) (F)salimNo ratings yet
- Intro To Tel 433Document2 pagesIntro To Tel 433TestimonyNo ratings yet
- Mod Con Sys HandoutDocument2 pagesMod Con Sys HandoutSrinivasan M PNo ratings yet
- 10.1007@978 3 030 25446 9Document363 pages10.1007@978 3 030 25446 9Nors NoorNo ratings yet
- Design of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemDocument11 pagesDesign of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemNors NoorNo ratings yet
- Design of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemDocument11 pagesDesign of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemNors NoorNo ratings yet
- Liang 2020Document8 pagesLiang 2020Nors NoorNo ratings yet
- Ornelas Tellez2012Document13 pagesOrnelas Tellez2012Nors NoorNo ratings yet
- Energies: Model Predictive Control Optimization Via Genetic Algorithm Using A Detailed Building Energy ModelDocument18 pagesEnergies: Model Predictive Control Optimization Via Genetic Algorithm Using A Detailed Building Energy ModelNors NoorNo ratings yet
- Design of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemDocument11 pagesDesign of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemNors NoorNo ratings yet
- Design of Fuzzy Controller Rule Base Using Bat Algorithm Design of Fuzzy Controller Rule Base Using Bat AlgorithmDocument10 pagesDesign of Fuzzy Controller Rule Base Using Bat Algorithm Design of Fuzzy Controller Rule Base Using Bat AlgorithmNors NoorNo ratings yet
- Springer Text Books: S.No. Book Title Author Edition OpenurlDocument21 pagesSpringer Text Books: S.No. Book Title Author Edition OpenurlGustavo ReyesNo ratings yet
- Adaptive Backstepping Control: Abstract. Adaptive Backsteppingalgorithms For A Class of Nonlinear ContinuousDocument25 pagesAdaptive Backstepping Control: Abstract. Adaptive Backsteppingalgorithms For A Class of Nonlinear ContinuousNors NoorNo ratings yet
- University of Technology Control and System Eng. Computer Branch Arduino 2019-2020 Diana Hikmat Hassan Duaa Saad QiabDocument10 pagesUniversity of Technology Control and System Eng. Computer Branch Arduino 2019-2020 Diana Hikmat Hassan Duaa Saad QiabNors NoorNo ratings yet
- A Backstepping Simple Adaptive Control Application To Flexible Space StructuresDocument7 pagesA Backstepping Simple Adaptive Control Application To Flexible Space StructuresNors NoorNo ratings yet
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 pagesOn Integral Control in Backstepping: Analysis of Different TechniquesNors NoorNo ratings yet
- RBF NN-Based Backstepping Control For Strict Feedback Block Nonlinear System and Its ApplicationDocument9 pagesRBF NN-Based Backstepping Control For Strict Feedback Block Nonlinear System and Its ApplicationNors NoorNo ratings yet
- Design and Implementation of A Novel Adaptive Backstepping Control Scheme For A PMSM With Unknown Load TorqueDocument11 pagesDesign and Implementation of A Novel Adaptive Backstepping Control Scheme For A PMSM With Unknown Load TorqueNors NoorNo ratings yet
- FPGA Implementation of MIMO AlgorithmsDocument4 pagesFPGA Implementation of MIMO AlgorithmsNors NoorNo ratings yet
- Matlab/simulink Simulation of Unified Power Quality Conditioner-Battery Energy Storage System Supplied by PV-wind Hybrid Using Fuzzy Logic ControllerDocument17 pagesMatlab/simulink Simulation of Unified Power Quality Conditioner-Battery Energy Storage System Supplied by PV-wind Hybrid Using Fuzzy Logic ControllerNors NoorNo ratings yet
- Fuzzy Logic Control of A Rotary Double Inverted Pendulum SystemDocument8 pagesFuzzy Logic Control of A Rotary Double Inverted Pendulum SystemNors Noor0% (1)
- A Comparative Analysis of Intelligent and PID Controllers For An Aircraft Pitch Control SystemDocument9 pagesA Comparative Analysis of Intelligent and PID Controllers For An Aircraft Pitch Control SystemNors NoorNo ratings yet
- Engel 2015 IOP Conf. Ser. Mater. Sci. Eng. 94 012009Document9 pagesEngel 2015 IOP Conf. Ser. Mater. Sci. Eng. 94 012009Nors NoorNo ratings yet
- 1 PB PDFDocument9 pages1 PB PDFNors NoorNo ratings yet
- Calculation SheetDocument14 pagesCalculation SheetmohitNo ratings yet
- Introduction To Quantum Metrology by Waldemar Nawrocki (2015)Document287 pagesIntroduction To Quantum Metrology by Waldemar Nawrocki (2015)Vallik TadNo ratings yet
- Belt Drives CalculationDocument15 pagesBelt Drives CalculationmalharNo ratings yet
- XD248 Temperature Controller SettingDocument2 pagesXD248 Temperature Controller SettingKan Chee LiangNo ratings yet
- Wind TurbinesDocument175 pagesWind TurbinesTrexNo ratings yet
- StratumDocument42 pagesStratumAchmad WinarkoNo ratings yet
- Ford-Cups Us 2012Document9 pagesFord-Cups Us 2012Engr ShoaibNo ratings yet
- BVAA Valve User Issue 13 PDFDocument88 pagesBVAA Valve User Issue 13 PDFrakacyuNo ratings yet
- Huang 2018Document22 pagesHuang 2018Bendol GalihNo ratings yet
- q1wk1 gp1 La1Document1 pageq1wk1 gp1 La1ian babiloniaNo ratings yet
- GR 12 - Mathematics ATP - 2024Document9 pagesGR 12 - Mathematics ATP - 2024alwandeolwethu36No ratings yet
- Pre Test Math7 - Q1Document3 pagesPre Test Math7 - Q1Michelle Jane Evangelista100% (2)
- Is Iso 20474 3 2008 PDFDocument17 pagesIs Iso 20474 3 2008 PDFsubhochandraNo ratings yet
- Solar ChartDocument36 pagesSolar ChartAvantika DhimanNo ratings yet
- 2004 An Insight Into The New Austrian TunnellDocument14 pages2004 An Insight Into The New Austrian TunnellafuhcivNo ratings yet
- ABPR OperatorManual PDFDocument36 pagesABPR OperatorManual PDFLola Karvajal100% (2)
- Achievement 9 FINAL - DDocument3 pagesAchievement 9 FINAL - DJaeha CruzNo ratings yet
- Robot Programming Aid For The Smartray Inspection SystemDocument7 pagesRobot Programming Aid For The Smartray Inspection SystemDavid RubianoNo ratings yet
- 2192Y / H03VVH2-F BS EN 50525-2-11 Flexible CableDocument2 pages2192Y / H03VVH2-F BS EN 50525-2-11 Flexible CableVictor Manayay ChamayaNo ratings yet
- Interaction of Charged Particles With Matter: Venika GanjirDocument22 pagesInteraction of Charged Particles With Matter: Venika GanjirvenikaNo ratings yet
- Hegarty Revision List - FOUNDATIONDocument2 pagesHegarty Revision List - FOUNDATIONMihaela GrosuNo ratings yet
- A Numerical Study of Some Aspects of The Spherical Charge Cratering TheoryDocument15 pagesA Numerical Study of Some Aspects of The Spherical Charge Cratering TheoryÁALNo ratings yet
- Wind Load Predicting How Could CFD Replaced-SusilaDocument15 pagesWind Load Predicting How Could CFD Replaced-SusilaiGedeASNo ratings yet
- Bivariate Data ProjectDocument5 pagesBivariate Data ProjectTrang VuNo ratings yet
- Weld DefectsDocument23 pagesWeld DefectsSridhar CnNo ratings yet
- Exp-8 Staircase WiringDocument3 pagesExp-8 Staircase WiringUjjwal GargNo ratings yet
- BRAUN A5S0-Manual ENDocument20 pagesBRAUN A5S0-Manual ENSureshNo ratings yet
- MSCE 509-106-Deep Beams Using Strut and Tie ModelsDocument26 pagesMSCE 509-106-Deep Beams Using Strut and Tie ModelsOtep TimusNo ratings yet