You might also like
- Software Testing Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandSoftware Testing Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- Assessment of The Iso 26262 Standard, "Road Vehicles - Functional Safety"Document19 pagesAssessment of The Iso 26262 Standard, "Road Vehicles - Functional Safety"Marziyeh MoosaviNo ratings yet
- Interface control document The Ultimate Step-By-Step GuideFrom EverandInterface control document The Ultimate Step-By-Step GuideNo ratings yet
- 2016 05 Talk in The Royal Park - ASPICE 3.0 Method ParkDocument63 pages2016 05 Talk in The Royal Park - ASPICE 3.0 Method Parkbnd1uNo ratings yet
- Automotive Quality Management Systems A Complete Guide - 2020 EditionFrom EverandAutomotive Quality Management Systems A Complete Guide - 2020 EditionNo ratings yet
- FMEA Analysis TechniquesDocument12 pagesFMEA Analysis TechniquesLake HouseNo ratings yet
- Advanced Driver Assistance Systems (ADAS) Standard RequirementsFrom EverandAdvanced Driver Assistance Systems (ADAS) Standard RequirementsNo ratings yet
- Applied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Document29 pagesApplied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Girish KasturiNo ratings yet
- Vda 5733 JB 2022 en Web RZ PDFDocument131 pagesVda 5733 JB 2022 en Web RZ PDFSoufian BirjaliNo ratings yet
- 07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutDocument33 pages07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutsunithaNo ratings yet
- Automotive Safety Integrity Level A Complete Guide - 2020 EditionFrom EverandAutomotive Safety Integrity Level A Complete Guide - 2020 EditionNo ratings yet
- Day4 English 2017 0509Document35 pagesDay4 English 2017 0509pradhan1987No ratings yet
- Agile Essentials You Always Wanted To Know: Self Learning ManagementFrom EverandAgile Essentials You Always Wanted To Know: Self Learning ManagementNo ratings yet
- Agile Software Development Quality Assurance A Complete Guide - 2020 EditionFrom EverandAgile Software Development Quality Assurance A Complete Guide - 2020 EditionNo ratings yet
- Fundamentals of FMEA PDFDocument35 pagesFundamentals of FMEA PDFPriatna suheriNo ratings yet
- Software ProcessDocument50 pagesSoftware ProcessAnuraj001No ratings yet
- Application of AR + VR + MR in Automobile Industry: Group 7Document8 pagesApplication of AR + VR + MR in Automobile Industry: Group 7Janesha KhandelwalNo ratings yet
- 02 ASpice-Intro Motivation&BasicConceptsDocument56 pages02 ASpice-Intro Motivation&BasicConceptsevan leeNo ratings yet
- Certkitiec SLDV CDT PDFDocument15 pagesCertkitiec SLDV CDT PDFÍcaro VianaNo ratings yet
- PIMS production information management system Complete Self-Assessment GuideFrom EverandPIMS production information management system Complete Self-Assessment GuideRating: 5 out of 5 stars5/5 (1)
- FMEA PG Seminar For WebsiteDocument21 pagesFMEA PG Seminar For WebsiteMuhd HazwanNo ratings yet
- Implementing Robotic Process Automation Standard RequirementsFrom EverandImplementing Robotic Process Automation Standard RequirementsNo ratings yet
- Unit TestingDocument4 pagesUnit Testingapi-3709875No ratings yet
- Redefining the Basics of Project Management: Filling the Practice Gaps by Integrating Pmbok® Guide with a Project Life Span Approach!From EverandRedefining the Basics of Project Management: Filling the Practice Gaps by Integrating Pmbok® Guide with a Project Life Span Approach!No ratings yet
- System Safety Engineering An Overview For Engineers and ManagersDocument42 pagesSystem Safety Engineering An Overview For Engineers and Managersmadonnite3781No ratings yet
- 00 Intro PDFDocument27 pages00 Intro PDFMarziyeh MoosaviNo ratings yet
- 2.REQUIREMENTS Eee403Document93 pages2.REQUIREMENTS Eee403abdullahfatayerNo ratings yet
- Engine Systems Business Unit: Process Capability Checks (PCC) According ASPICE Implementation May 11, 2017Document20 pagesEngine Systems Business Unit: Process Capability Checks (PCC) According ASPICE Implementation May 11, 2017sunithaNo ratings yet
- Literature Automotive-Spice PosterDocument1 pageLiterature Automotive-Spice PosterMarceta BrankicaNo ratings yet
- Functional Safety Embedded Systems: Integration of in The Development Process ofDocument34 pagesFunctional Safety Embedded Systems: Integration of in The Development Process ofAleksandar MilinkovicNo ratings yet
- R4 AQUA-ASPICE-iDesigner EN v4Document97 pagesR4 AQUA-ASPICE-iDesigner EN v4Berry Blue100% (1)
- 2-10 Automotive-Spice Version 3 PocketguideDocument110 pages2-10 Automotive-Spice Version 3 PocketguideMarwen BoualleguiNo ratings yet
- Product Quality Target Study Plan (PQTSP) : Key Point(s)Document1 pageProduct Quality Target Study Plan (PQTSP) : Key Point(s)nicuNo ratings yet
- 02a ASpice-Intro VDAGuidelinesDocument17 pages02a ASpice-Intro VDAGuidelinesevan leeNo ratings yet
- Iso 26262 Dis Tutorial 2010 Final - 1 PDFDocument160 pagesIso 26262 Dis Tutorial 2010 Final - 1 PDFashim_verma100% (1)
- UK Car Industry PDFDocument167 pagesUK Car Industry PDFDiegoNo ratings yet
- TWR Response MoodleDocument47 pagesTWR Response MoodleDiegoNo ratings yet
- B Sims Seminar 2 Case Studies AEM MSC CourseDocument7 pagesB Sims Seminar 2 Case Studies AEM MSC CourseDiegoNo ratings yet
- Thoughts On LeadershipDocument2 pagesThoughts On LeadershipDiegoNo ratings yet
- SEMINAR 2 GROUP SESSION Notes B Sims Nov 14 PDFDocument1 pageSEMINAR 2 GROUP SESSION Notes B Sims Nov 14 PDFDiegoNo ratings yet
- Sponsorship Week 3 OBU MSC 2016Document20 pagesSponsorship Week 3 OBU MSC 2016DiegoNo ratings yet
- Marketing and Sales Sept 2015 - OBU MEMSDocument25 pagesMarketing and Sales Sept 2015 - OBU MEMSDiegoNo ratings yet
- P04712 Introduction GCDocument18 pagesP04712 Introduction GCDiegoNo ratings yet
- Markets and ProductsDocument27 pagesMarkets and ProductsDiegoNo ratings yet
- Functional Safety With ISO 26262: 15 Years of ConsultingDocument36 pagesFunctional Safety With ISO 26262: 15 Years of ConsultingSrinivasanNo ratings yet
- Advanced Engineering Management Exam QuestionsDocument3 pagesAdvanced Engineering Management Exam QuestionsDiegoNo ratings yet
- Active InertiaDocument6 pagesActive InertiaDiegoNo ratings yet
- Automotive Functional Safety WP PDFDocument10 pagesAutomotive Functional Safety WP PDFchinna257No ratings yet
- P04712 Advanced Engineering Management Examination RubricDocument3 pagesP04712 Advanced Engineering Management Examination RubricDiegoNo ratings yet
- Polarion User Finland Day ISO26262 PDFDocument19 pagesPolarion User Finland Day ISO26262 PDFDiegoNo ratings yet
- Hans-Leo Ross (Auth.) - Functional Safety For Road Vehicles - New Challenges and Solutions For E-Mobility and Automated Driving-Springer International Publishing (2016)Document276 pagesHans-Leo Ross (Auth.) - Functional Safety For Road Vehicles - New Challenges and Solutions For E-Mobility and Automated Driving-Springer International Publishing (2016)asd asdf100% (1)
- PARKING BRAKE NissanDocument16 pagesPARKING BRAKE NissanFrederikusNo ratings yet
- BOM 09:00 GOP 11:15: Mumbai To Gorakhpur Nyny7MDocument2 pagesBOM 09:00 GOP 11:15: Mumbai To Gorakhpur Nyny7MvipanNo ratings yet
- XC Series Lithium Battery Forklift 2 - 3.5 TNDocument6 pagesXC Series Lithium Battery Forklift 2 - 3.5 TNcsmokNo ratings yet
- Catalogo ATKDocument227 pagesCatalogo ATKsantiago.peralta93No ratings yet
- Cars 20230227153655Document9 pagesCars 20230227153655NaimahSulistianingsihNo ratings yet
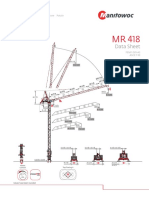
- Potain MR418-FEM-Luffing Tower CraneDocument8 pagesPotain MR418-FEM-Luffing Tower CraneCompass equipmentNo ratings yet
- Concrete Pipe Design Manual 2012 (1) - RemovedDocument29 pagesConcrete Pipe Design Manual 2012 (1) - RemovedGabrielaNo ratings yet
- Econ 180099HDocument7 pagesEcon 180099HXy karNo ratings yet
- Infrastructure in India: Challenges and Opportunities: Gajendra HaldeaDocument23 pagesInfrastructure in India: Challenges and Opportunities: Gajendra HaldeaBravely KhonaNo ratings yet
- Front Wheel Drive Shaft ReplacementDocument5 pagesFront Wheel Drive Shaft ReplacementKeyser SözeNo ratings yet
- pdf255 JF506EDocument5 pagespdf255 JF506Ekonecny141No ratings yet
- O Cial: Carly Diagnostics ReportDocument20 pagesO Cial: Carly Diagnostics ReportAlejandro GomezNo ratings yet
- Process ParagraphDocument17 pagesProcess Paragraphモミニュル イスラムNo ratings yet
- PROJECT NO:61-2014 Boq For Materials & Workmanship International Park Office BuildingDocument73 pagesPROJECT NO:61-2014 Boq For Materials & Workmanship International Park Office Buildingaya osmanNo ratings yet
- A Windo A Windo A Windo A Windo A Window Into Our W Wintoourw Wintoourw Wintoourw W Into Our World !! Orld !! Orld !! Orld !! Orld !!Document8 pagesA Windo A Windo A Windo A Windo A Window Into Our W Wintoourw Wintoourw Wintoourw W Into Our World !! Orld !! Orld !! Orld !! Orld !!ShreyasNo ratings yet
- Aeb010171 ISX 15 BaseDocument12 pagesAeb010171 ISX 15 BaseJose SantosNo ratings yet
- Reading Models TheoriesDocument11 pagesReading Models TheoriesJireh RobellonNo ratings yet
- CATALOGUE CBR150R-RADocument154 pagesCATALOGUE CBR150R-RAjuvelyn.aclaoNo ratings yet
- LEDriving LED H7 H4 Fahrzeugliste EN 19042023Document12 pagesLEDriving LED H7 H4 Fahrzeugliste EN 19042023Carlos SaraivaNo ratings yet
- Warranty & Maintenance GuideDocument68 pagesWarranty & Maintenance GuideKenneth ShiNo ratings yet
- Truck Size and Length Limits: Width of Vehicle / LoadDocument4 pagesTruck Size and Length Limits: Width of Vehicle / LoadahmsalNo ratings yet
- Enraf-Nonius Manumed Basic ENDocument16 pagesEnraf-Nonius Manumed Basic ENFlexxxy SssNo ratings yet
- Full Report For Gasoline Fuel System For Toyota CorollaDocument19 pagesFull Report For Gasoline Fuel System For Toyota Corollaaliashour123No ratings yet
- AP07DR1510 EstDocument2 pagesAP07DR1510 EstSåí Kûmã RNo ratings yet
- Grade 8 HL June ExamDocument9 pagesGrade 8 HL June ExamMadeline KrielNo ratings yet
- Traffic Sign RecognitionDocument6 pagesTraffic Sign RecognitionGlaizel MorcillaNo ratings yet
- Staple Finisher E1 Booklet Finisher E1 PCDocument98 pagesStaple Finisher E1 Booklet Finisher E1 PCADVC TECHNo ratings yet
- NHAI Guidelines for Drone VideographyDocument9 pagesNHAI Guidelines for Drone VideographyRK BANSALNo ratings yet
- GOVECS T Series Flyer WEB 16Document4 pagesGOVECS T Series Flyer WEB 16surendra manandharNo ratings yet
- LTX 70 80 EN ManualDocument186 pagesLTX 70 80 EN ManualmyunusanisNo ratings yet