You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Ambulatory Activity Monitoring Progress in MeasureDocument12 pagesAmbulatory Activity Monitoring Progress in MeasureIulia CostacheNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Tutorial Mat Elastic Iac PDFDocument25 pagesTutorial Mat Elastic Iac PDFIulia CostacheNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Fisa Tehnica Scula DebavurareDocument3 pagesFisa Tehnica Scula DebavurareIulia CostacheNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Disabled Village Children: A Guide For Community Health Workers, Rehabilitation Workers, and FamiliesDocument85 pagesDisabled Village Children: A Guide For Community Health Workers, Rehabilitation Workers, and FamiliesIulia CostacheNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Fisa Tehnica Scula DebavurareDocument3 pagesFisa Tehnica Scula DebavurareIulia CostacheNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Fisa Tehnica QC-5 Interfata MecanicaDocument1 pageFisa Tehnica QC-5 Interfata MecanicaIulia CostacheNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Fisa Tehica Post de Stocare Scule 2Document1 pageFisa Tehica Post de Stocare Scule 2Iulia CostacheNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Increasing The Robot's Working Area High Speed - Short Cycle Time Direct or Slewing DriveDocument2 pagesIncreasing The Robot's Working Area High Speed - Short Cycle Time Direct or Slewing DriveIulia CostacheNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Fltru Reg PresuneDocument1 pageFltru Reg PresuneIulia CostacheNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Irbp R: PositionerDocument2 pagesIrbp R: PositionerIulia CostacheNo ratings yet
- V Rep6Document30 pagesV Rep6Iulia CostacheNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Manual Post de Stocare Scule PDFDocument81 pagesManual Post de Stocare Scule PDFIulia CostacheNo ratings yet
- Motoman Hp20D-6: Handling & General Applications With The HP-seriesDocument2 pagesMotoman Hp20D-6: Handling & General Applications With The HP-seriesIulia CostacheNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Flexible Lab Automation With The MOTOMAN CSDA10FDocument4 pagesFlexible Lab Automation With The MOTOMAN CSDA10FIulia CostacheNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Flyer Robot EPX Series E 06.2015 13 PDFDocument8 pagesFlyer Robot EPX Series E 06.2015 13 PDFIulia CostacheNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
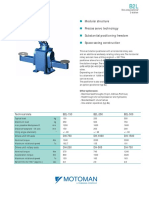
- Modular Structure Precise Servo Technology Substantial Positioning Freedom Space Saving ConstructionDocument2 pagesModular Structure Precise Servo Technology Substantial Positioning Freedom Space Saving ConstructionIulia CostacheNo ratings yet
- Modular Structure Precise Servo Technology Substantial Positioning Freedom Space Saving ConstructionDocument2 pagesModular Structure Precise Servo Technology Substantial Positioning Freedom Space Saving ConstructionIulia CostacheNo ratings yet
- Compact Style Precise Servo Technology: Technical Data DK-250 DK-500 DK-1000 DK-1500 DK-2500Document1 pageCompact Style Precise Servo Technology: Technical Data DK-250 DK-500 DK-1000 DK-1500 DK-2500Iulia CostacheNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Compact Style Precise Servo Technology Substantial Positioning Freedom Space Saving ConstructionDocument2 pagesCompact Style Precise Servo Technology Substantial Positioning Freedom Space Saving ConstructionIulia CostacheNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 511E - 18 - CrossRollerRing COMPLETDocument56 pages511E - 18 - CrossRollerRing COMPLETIulia CostacheNo ratings yet
- V Rep1Document51 pagesV Rep1Iulia CostacheNo ratings yet
- Design Concept For Jib CraneDocument12 pagesDesign Concept For Jib Cranevish5610100% (3)
- SSL300M ManualDocument4 pagesSSL300M ManualoscarNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Steel Design Final Project - Tradeoffs For All Structural MembersDocument87 pagesSteel Design Final Project - Tradeoffs For All Structural MembersEmmanuel Lazo100% (6)
- Canam Purlins and Girts Catalogue CanadaDocument0 pagesCanam Purlins and Girts Catalogue CanadasaivanvalendezNo ratings yet
- TerminalDocument52 pagesTerminalPhuoc PhamNo ratings yet
- Dokumen - Tips - Colliery Training Reportsarpi Project EclDocument41 pagesDokumen - Tips - Colliery Training Reportsarpi Project EclRahul GhoshNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Single-Reduction Differential Carriers: Maintenance Manual 5Document79 pagesSingle-Reduction Differential Carriers: Maintenance Manual 5TavyLocNo ratings yet
- 2012-Ansi - z502 BisscDocument45 pages2012-Ansi - z502 BisscRoberto PerezNo ratings yet
- Piping QC PocketBook Navaneethan SundaramDocument25 pagesPiping QC PocketBook Navaneethan SundaramShanmuga NavaneethanNo ratings yet
- Spesifikasi Sensor WIKADocument32 pagesSpesifikasi Sensor WIKArochmad eko suyudiNo ratings yet
- AMW Parts CatalogueDocument363 pagesAMW Parts CatalogueSubhash KediaNo ratings yet
- Purlin LysaghtDocument6 pagesPurlin LysaghtAnonymous MHMqCrzgTNo ratings yet
- Ba Sar2 07 16 Am1 Parallel En-1 2Document72 pagesBa Sar2 07 16 Am1 Parallel En-1 2bayuNo ratings yet
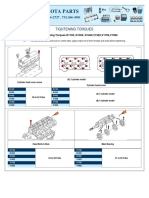
- Kubota Parts: Tightening TorquesDocument3 pagesKubota Parts: Tightening TorquesAlaina SousaNo ratings yet
- Berchtold Chromophare D-300,530,650 - Service ManualDocument98 pagesBerchtold Chromophare D-300,530,650 - Service ManualRaymundo TejedaNo ratings yet
- L2301 Field Sketch PackageDocument6 pagesL2301 Field Sketch PackageMuhsen KhanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Civil & Finishing Work B.O.QDocument32 pagesCivil & Finishing Work B.O.QSagar SharmaNo ratings yet
- UPDATED - Method Statement Bearing Exchange PDFDocument2 pagesUPDATED - Method Statement Bearing Exchange PDFdfraile3556No ratings yet
- SRI Firefighting SpecDocument3 pagesSRI Firefighting SpecSopheareak ChhanNo ratings yet
- Lesson Plan in Electrical TechnologyDocument3 pagesLesson Plan in Electrical TechnologyLev'z XDNo ratings yet
- Al115c Mio Cylinder PDFDocument2 pagesAl115c Mio Cylinder PDFIwen Tiga BitNo ratings yet
- Structure Calculation Connection Design For Alar HotelDocument63 pagesStructure Calculation Connection Design For Alar Hotelmilenaglisic1121No ratings yet
- BS 5041.1-1987 Fire Hydrant Systems EquipmentDocument16 pagesBS 5041.1-1987 Fire Hydrant Systems EquipmentAnnahuynh0% (2)
- How To Read P&IDDocument27 pagesHow To Read P&IDRakesh Ranjan100% (3)
- Fire CatDocument144 pagesFire CatGOGmantateNo ratings yet
- Spare Parts List: Hydraulic BreakersDocument32 pagesSpare Parts List: Hydraulic BreakersCarlosAbrantes100% (1)
- AbrreviationDocument33 pagesAbrreviationtrandangbkNo ratings yet
- Julius Bloom CatalogDocument143 pagesJulius Bloom Catalogjrobinson817830% (1)
- prEN1993 1 9 2nd Rev PDFDocument27 pagesprEN1993 1 9 2nd Rev PDFmichel92748No ratings yet
- Cut Tee PB at Beam Junction Welded GussetDocument1 pageCut Tee PB at Beam Junction Welded GussetRajveer SinghNo ratings yet