You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Transformer Failures, Causes and ImpactDocument4 pagesTransformer Failures, Causes and ImpactveraNo ratings yet
- Di1 (Si210) Elevator: Trouble ShootingDocument74 pagesDi1 (Si210) Elevator: Trouble ShootingArnaldo cordovaNo ratings yet
- CNC PDFDocument99 pagesCNC PDFAdrianNo ratings yet
- Projecting Hints: Function Modules FS20D-SR-WSDocument1 pageProjecting Hints: Function Modules FS20D-SR-WSmhasansharifiNo ratings yet
- Inlet Modules Model Code: ExampleDocument1 pageInlet Modules Model Code: ExamplemhasansharifiNo ratings yet
- Cylinder Function Modules Model Code: ExampleDocument1 pageCylinder Function Modules Model Code: ExamplemhasansharifiNo ratings yet
- Projecting Hints: GeneralDocument1 pageProjecting Hints: GeneralmhasansharifiNo ratings yet
- Main Load Modules Model Code: ExampleDocument1 pageMain Load Modules Model Code: ExamplemhasansharifiNo ratings yet
- ADM485 Technical Specifications and Performance GraphsDocument1 pageADM485 Technical Specifications and Performance GraphsmhasansharifiNo ratings yet
- Figure 15. Unloaded Driver Differential Outputs Figure 18. Driver/Receiver Propagation Delays, High To LowDocument1 pageFigure 15. Unloaded Driver Differential Outputs Figure 18. Driver/Receiver Propagation Delays, High To LowmhasansharifiNo ratings yet
- ADM485 Switching and Timing CharacteristicsDocument1 pageADM485 Switching and Timing CharacteristicsmhasansharifiNo ratings yet
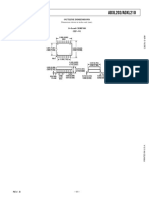
- ADXL202/ADXL210: Outline DimensionsDocument1 pageADXL202/ADXL210: Outline DimensionsmhasansharifiNo ratings yet
- ADM485 Pin Configuration and Function DescriptionsDocument1 pageADM485 Pin Configuration and Function DescriptionsmhasansharifiNo ratings yet
- Adm485 16 PDFDocument1 pageAdm485 16 PDFmhasansharifiNo ratings yet
- ADM485 dimensions outline SOIC MSOPDocument1 pageADM485 dimensions outline SOIC MSOPmhasansharifiNo ratings yet
- 5 V Low Power EIA RS-485 Transceiver ADM485: Features Functional Block DiagramDocument1 page5 V Low Power EIA RS-485 Transceiver ADM485: Features Functional Block DiagrammhasansharifiNo ratings yet
- ADM485 Test Circuits: Figure 20. Driver Voltage Measurement Figure 23. Driver Enable/DisableDocument1 pageADM485 Test Circuits: Figure 20. Driver Voltage Measurement Figure 23. Driver Enable/DisablemhasansharifiNo ratings yet
- ADM485 Typical Performance Characteristics: Rev. F - Page 7 of 16Document1 pageADM485 Typical Performance Characteristics: Rev. F - Page 7 of 16mhasansharifiNo ratings yet
- ADM485 Absolute Maximum Ratings: Table 4. TransmittingDocument1 pageADM485 Absolute Maximum Ratings: Table 4. TransmittingmhasansharifiNo ratings yet
- ADM485 Technical Specifications and Performance GraphsDocument1 pageADM485 Technical Specifications and Performance GraphsmhasansharifiNo ratings yet
- ADXL202/ADXL210: F C (X, Y) F CDocument1 pageADXL202/ADXL210: F C (X, Y) F CmhasansharifiNo ratings yet
- Revision History: 04/08-Rev. E To Rev. F 1/03-Rev. B To Rev. CDocument1 pageRevision History: 04/08-Rev. E To Rev. F 1/03-Rev. B To Rev. CmhasansharifiNo ratings yet
- ADXL202/ADXL210: Outline DimensionsDocument1 pageADXL202/ADXL210: Outline DimensionsmhasansharifiNo ratings yet
- Timing Specifications: Table 2Document1 pageTiming Specifications: Table 2mhasansharifiNo ratings yet
- ADXL202/ADXL210: Absolute Maximum Ratings Pin ConfigurationDocument1 pageADXL202/ADXL210: Absolute Maximum Ratings Pin ConfigurationmhasansharifiNo ratings yet
- Adm485 Specifications: V 5 V 5%, All Specifications T Tot, Unless Otherwise NotedDocument1 pageAdm485 Specifications: V 5 V 5%, All Specifications T Tot, Unless Otherwise NotedmhasansharifiNo ratings yet
- ADXL202/ADXL210 Accelerometer Technical DocumentDocument1 pageADXL202/ADXL210 Accelerometer Technical DocumentmhasansharifiNo ratings yet
- Adxl202 5 PDFDocument1 pageAdxl202 5 PDFmhasansharifiNo ratings yet
- Adxl202 6 PDFDocument1 pageAdxl202 6 PDFmhasansharifiNo ratings yet
- Adxl202 4 PDFDocument1 pageAdxl202 4 PDFmhasansharifiNo ratings yet
- Adxl202 4 PDFDocument1 pageAdxl202 4 PDFmhasansharifiNo ratings yet
- Adxl202/Adxl210-Specifications: ADXL202/JQC/AQC ADXL210/JQC/AQC Parameter Conditions Min Typ Max Min Typ Max UnitsDocument1 pageAdxl202/Adxl210-Specifications: ADXL202/JQC/AQC ADXL210/JQC/AQC Parameter Conditions Min Typ Max Min Typ Max UnitsmhasansharifiNo ratings yet
- Adxl202/Adxl210-Specifications: ADXL202/JQC/AQC ADXL210/JQC/AQC Parameter Conditions Min Typ Max Min Typ Max UnitsDocument1 pageAdxl202/Adxl210-Specifications: ADXL202/JQC/AQC ADXL210/JQC/AQC Parameter Conditions Min Typ Max Min Typ Max UnitsmhasansharifiNo ratings yet
- Chapter 3: The PIC MicrocontrollersDocument16 pagesChapter 3: The PIC MicrocontrollersBernard Maacaron100% (1)
- Getting Email Under ControlDocument4 pagesGetting Email Under ControlFred Raphael IlomoNo ratings yet
- Design and Analysis of Hydraulic CircuitsDocument12 pagesDesign and Analysis of Hydraulic Circuitssharafudheen_sNo ratings yet
- Ring Resonator LabDocument12 pagesRing Resonator LabTyler AndersonNo ratings yet
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentAli DurazNo ratings yet
- Star Delta Starter Connection Diagram and Wiring - ETechnoGDocument5 pagesStar Delta Starter Connection Diagram and Wiring - ETechnoGChigbundu EmeruwaNo ratings yet
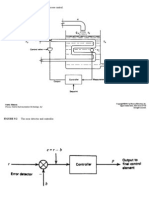
- FIGURE 9.1 Control of Temperature by Process Control.: Curtis JohnsonDocument26 pagesFIGURE 9.1 Control of Temperature by Process Control.: Curtis JohnsonMuhammad Haris HamayunNo ratings yet
- EIN 01 Questions 20 November 10Document22 pagesEIN 01 Questions 20 November 10Aleihs AyadneNo ratings yet
- Numaapi3 PDFDocument12 pagesNumaapi3 PDFfermarioNo ratings yet
- Chapter 1: 1-Phase Induction Motor: StatorDocument35 pagesChapter 1: 1-Phase Induction Motor: StatorKhushboo SharmaNo ratings yet
- LC230W01 A2Document29 pagesLC230W01 A2gondifNo ratings yet
- Shop directly for VE5-2 Block Contactor Accessories and related productsDocument4 pagesShop directly for VE5-2 Block Contactor Accessories and related productsLuciano PereiraNo ratings yet
- Advanced View of Atmega Microcontroller 1673 Projects List - Nov 2019 ATMega32 AVRDocument140 pagesAdvanced View of Atmega Microcontroller 1673 Projects List - Nov 2019 ATMega32 AVRBilal AfzalNo ratings yet
- Alcatel 7270 ATMDocument4 pagesAlcatel 7270 ATMmike7330No ratings yet
- Workflow Diagrams: For DIT and On Set GradingDocument9 pagesWorkflow Diagrams: For DIT and On Set GradingClaudia MacchiavelloNo ratings yet
- M42 HP STSD Mahadevapura, Bangalore R3 30.10.09Document7 pagesM42 HP STSD Mahadevapura, Bangalore R3 30.10.09tceterexNo ratings yet
- ACO 3901manual EditionEDocument104 pagesACO 3901manual EditionEs1234tNo ratings yet
- 520l0344 (Danfoss PVG32)Document80 pages520l0344 (Danfoss PVG32)Purnomo Anton100% (2)
- Tl-wn722n v1 User GuideDocument41 pagesTl-wn722n v1 User GuideSadam LashariNo ratings yet
- ROC800-Series Remote Operations Controllers PDFDocument10 pagesROC800-Series Remote Operations Controllers PDFsaoNo ratings yet
- Distributed Safety: Sensor-Actuator Interfacing: SITRAIN Training ForDocument23 pagesDistributed Safety: Sensor-Actuator Interfacing: SITRAIN Training Forcarsan87No ratings yet
- How A Temperature Transmitter WorksDocument1 pageHow A Temperature Transmitter Worksabdur rafayNo ratings yet
- Honeywell-Sensing-Kgz10 Series Oxygen SensorsDocument4 pagesHoneywell-Sensing-Kgz10 Series Oxygen SensorstpchoNo ratings yet
- EES Data LTD Free To Use Estimating Labour Guide: ElectricalDocument63 pagesEES Data LTD Free To Use Estimating Labour Guide: ElectricalShahin Shajahan100% (1)
- The Following Table Lists The 8051 Instructions by HEX CodeDocument5 pagesThe Following Table Lists The 8051 Instructions by HEX CodeBruce_Jass_3739No ratings yet
- Reviewer IndusDocument3 pagesReviewer IndusBajogs RamosNo ratings yet
- ZTE FDD R8862A Product DescriptionDocument30 pagesZTE FDD R8862A Product DescriptionJumong100% (2)