You might also like
- Baofeng Uv5r Chirp Programming GuideDocument3 pagesBaofeng Uv5r Chirp Programming GuideChris Lu100% (1)
- Chien1995 PDFDocument6 pagesChien1995 PDFFelipeMorenoNo ratings yet
- Coool Hydraulic System Design ThesisDocument235 pagesCoool Hydraulic System Design ThesisGirish Kasturi100% (1)
- Automatic Liquid Level Controller Using LabviewDocument15 pagesAutomatic Liquid Level Controller Using LabviewAndrés BahamondeNo ratings yet
- Total Well Management IIDocument14 pagesTotal Well Management IIEdgar Tellez100% (1)
- Electrical SystemDocument368 pagesElectrical SystemAnonymous 28jRu2j100% (1)
- Electronic Cam Motion Generation With Special ReferenceDocument17 pagesElectronic Cam Motion Generation With Special ReferenceMillah HanifahNo ratings yet
- Controlled Variable Manipulated Variable Controlle R Type /scheme Gproms Model/Process NameDocument5 pagesControlled Variable Manipulated Variable Controlle R Type /scheme Gproms Model/Process NameJoseph OrjiNo ratings yet
- PC350LC-8 (Kepb075306)Document590 pagesPC350LC-8 (Kepb075306)Augusto100% (2)
- Network 2020 Mission Critical Communications PDFDocument36 pagesNetwork 2020 Mission Critical Communications PDFslobodanbuljugic100% (1)
- SPE-173759-MS Scale Modeling in ReservoirsDocument10 pagesSPE-173759-MS Scale Modeling in ReservoirsLawNo ratings yet
- College of Engineering Process Control Lab.: Basrah UniversityDocument11 pagesCollege of Engineering Process Control Lab.: Basrah UniversityhanaNo ratings yet
- Application of Fuzzy Controller in Drum Water-Level Control: Zhuo Wang Qiang WangDocument3 pagesApplication of Fuzzy Controller in Drum Water-Level Control: Zhuo Wang Qiang WangGnana Prakash JanarthananNo ratings yet
- SPE Pressure Transient Digital Data Acquisition and Analysis From Acoustic Echometric Surveys in Pumping WellsDocument10 pagesSPE Pressure Transient Digital Data Acquisition and Analysis From Acoustic Echometric Surveys in Pumping WellsCarlita SuntaxiNo ratings yet
- Juice Flow Stabilization Using PLC and Simulating With ScadaDocument3 pagesJuice Flow Stabilization Using PLC and Simulating With ScadaerpublicationNo ratings yet
- Adaptive Control of Liquid Liquid ExtractorDocument8 pagesAdaptive Control of Liquid Liquid ExtractorSnehasish Barman RoyNo ratings yet
- Acoustic Pressure Transient Testing CIM 2008Document16 pagesAcoustic Pressure Transient Testing CIM 2008sameer bakshiNo ratings yet
- TminDocument17 pagesTminhanaNo ratings yet
- Desalination and Water TreatmentDocument10 pagesDesalination and Water TreatmentAbdou LazregNo ratings yet
- Fundamentals of Gas Chromatography and Carrier GasDocument7 pagesFundamentals of Gas Chromatography and Carrier GasRoco neluNo ratings yet
- Pressure Transient PDFDocument11 pagesPressure Transient PDFenriqueg_53No ratings yet
- Modern Management of Artificial Lift Wells: A.L. PodioDocument11 pagesModern Management of Artificial Lift Wells: A.L. Podiojaccucv2150No ratings yet
- Brochure Echometer Well AnalyzerDocument3 pagesBrochure Echometer Well AnalyzermiguelNo ratings yet
- Study of Void Fraction Measurement in A Two Phase Flow by Using Differential Pressure and Electrical Capacitance TomographyDocument6 pagesStudy of Void Fraction Measurement in A Two Phase Flow by Using Differential Pressure and Electrical Capacitance Tomographysambhurisha mishraNo ratings yet
- Modern Total Well Management PDFDocument14 pagesModern Total Well Management PDFXXXXNo ratings yet
- E3sconf Iaecst20 01057Document4 pagesE3sconf Iaecst20 01057oxotosNo ratings yet
- Level Control of Single Water Tank Systems Using FDocument8 pagesLevel Control of Single Water Tank Systems Using FLong HoàngNo ratings yet
- DB Calibrator Microtrak OmnitrakDocument4 pagesDB Calibrator Microtrak OmnitrakKikie KieeNo ratings yet
- amr.945 949.2559Document5 pagesamr.945 949.2559Huynh Trung HieuNo ratings yet
- Lab Report 2Document5 pagesLab Report 2api-402271945No ratings yet
- "Prover-By-Prover" CALIBRATION OF PROVERS USING COMPACT PROVER AS MASTER METERDocument8 pages"Prover-By-Prover" CALIBRATION OF PROVERS USING COMPACT PROVER AS MASTER METERابوالحروف العربي ابوالحروفNo ratings yet
- Adv Power ElectronicsDocument5 pagesAdv Power ElectronicsSumon DharaNo ratings yet
- Designing of Fuzzy Logic Controller For Liquid Level ControllingDocument10 pagesDesigning of Fuzzy Logic Controller For Liquid Level ControllingSkr KhanNo ratings yet
- A Novel Method of Using A Control Valve For Measurement and Control of Flow - Instrumentation and Measurement, IEEE Transactions OnDocument3 pagesA Novel Method of Using A Control Valve For Measurement and Control of Flow - Instrumentation and Measurement, IEEE Transactions OnBhuvanaNo ratings yet
- 80005267enDocument4 pages80005267enRizki KarobyNo ratings yet
- Comparative Analysis of Boiler Drumlevel Control Using Advanced Classical ApproachesDocument12 pagesComparative Analysis of Boiler Drumlevel Control Using Advanced Classical ApproachesOmprakash VermaNo ratings yet
- 1986 - Chilvers - Measuring Vacuum Pump PerformanceDocument5 pages1986 - Chilvers - Measuring Vacuum Pump PerformanceNARAYANA RAO PUPPALANo ratings yet
- X-Ray Imaging Technique Simplifies and Improves Reservoir-Condition Unsteadystate Relative Permeability MeasurementsDocument12 pagesX-Ray Imaging Technique Simplifies and Improves Reservoir-Condition Unsteadystate Relative Permeability Measurementsari_siNo ratings yet
- Bahan Injeks Co2 2 PDFDocument7 pagesBahan Injeks Co2 2 PDFDimas RahmadiNo ratings yet
- Swabbing Test InterpretationDocument13 pagesSwabbing Test InterpretationaimeNo ratings yet
- Does Your Flowline System Put Your Facility Under StressDocument13 pagesDoes Your Flowline System Put Your Facility Under StressasozhyanNo ratings yet
- Prediction of Drag Reduction Effect in Turbulent Pulsating Pipe Flow by Machine Learning Based On Experimental DataDocument5 pagesPrediction of Drag Reduction Effect in Turbulent Pulsating Pipe Flow by Machine Learning Based On Experimental Datamjsm msmNo ratings yet
- 2000 2 PDFDocument56 pages2000 2 PDFarisandiyusufNo ratings yet
- 2011 - Modeling and Simulation of Flow Field of Main Spool in Servo Valve - HaoDocument4 pages2011 - Modeling and Simulation of Flow Field of Main Spool in Servo Valve - Haoarm coreNo ratings yet
- Análisis de Elevación Del Émbolo, Resolución de Problemas y OptimizaciónDocument15 pagesAnálisis de Elevación Del Émbolo, Resolución de Problemas y OptimizaciónCeleste ZapataNo ratings yet
- Process ControlDocument7 pagesProcess ControlVictor OuruNo ratings yet
- Ibp1169 11 PDFDocument11 pagesIbp1169 11 PDFRaiBernardoNo ratings yet
- FC Mag - Characteristics and SizingDocument5 pagesFC Mag - Characteristics and SizingAhmed KhairiNo ratings yet
- 17 MS 328750 JISKOOT JetLineDocument2 pages17 MS 328750 JISKOOT JetLinemukramaliNo ratings yet
- PID Control of Water Level in A Coupled Tank SystemDocument9 pagesPID Control of Water Level in A Coupled Tank SystemEioAsan100% (1)
- Know The Flow: Flow Sensor Integration For AUV and ROV ApplicationsDocument15 pagesKnow The Flow: Flow Sensor Integration For AUV and ROV ApplicationsyogeeshNo ratings yet
- Flotation Process ControlDocument12 pagesFlotation Process ControlJai Prakash PatelNo ratings yet
- On-Line Water Measurement of Liquid Petroleum Class # 5235Document4 pagesOn-Line Water Measurement of Liquid Petroleum Class # 5235Pedro Pablo Nuñez LeonNo ratings yet
- 401Document14 pages401giohaNo ratings yet
- Applied Sciences: Injection Molding Process Control of Servo-Hydraulic SystemDocument11 pagesApplied Sciences: Injection Molding Process Control of Servo-Hydraulic SystemTrung Kiên LêNo ratings yet
- SPE 53962 Surface Axial Load Based Progressive Cavity Pump Optimization SystemDocument6 pagesSPE 53962 Surface Axial Load Based Progressive Cavity Pump Optimization Systemmohit narayanNo ratings yet
- Flow Control Trainer: Experiment No: 03Document3 pagesFlow Control Trainer: Experiment No: 03Musa KhanNo ratings yet
- (Ok) Comparative Study of PID Controlled Modes On Automatic Water Level Measurement SystemDocument6 pages(Ok) Comparative Study of PID Controlled Modes On Automatic Water Level Measurement SystemPHONG LÊ BÁNo ratings yet
- Project 2 Report Baileyryan RoslynvansickleDocument15 pagesProject 2 Report Baileyryan Roslynvansickleapi-414830668No ratings yet
- 1 s2.0 S1474667016430922 MainDocument5 pages1 s2.0 S1474667016430922 MainAaron DeikNo ratings yet
- Additional Information From Flowmeters Via Signal AnalysisDocument7 pagesAdditional Information From Flowmeters Via Signal Analysisriku_mdgNo ratings yet
- 4 Pumps and Fluid Networks 4Document14 pages4 Pumps and Fluid Networks 4Omar AhmedNo ratings yet
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
- Polyfflers Pvt. LTD.: Let's Grow Together!Document4 pagesPolyfflers Pvt. LTD.: Let's Grow Together!bimalishaNo ratings yet
- Baikakaji Brochure New 11 8 2020 PDFDocument4 pagesBaikakaji Brochure New 11 8 2020 PDFbimalishaNo ratings yet
- Multi-Level Bill of Materials Template: Not StartedDocument3 pagesMulti-Level Bill of Materials Template: Not StartedbimalishaNo ratings yet
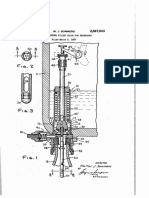
- W.J. Sommers: Counter-Pressure Filler Valve For Beverages Filed March 5, 1957Document3 pagesW.J. Sommers: Counter-Pressure Filler Valve For Beverages Filed March 5, 1957bimalishaNo ratings yet
- FRAMAX Cat MBlock en Rev3Document12 pagesFRAMAX Cat MBlock en Rev3bimalishaNo ratings yet
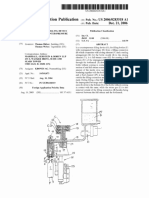
- Us20060283518a1 PDFDocument9 pagesUs20060283518a1 PDFbimalishaNo ratings yet
- Prudent Investment Insights 31st July 2020 1597474493863Document33 pagesPrudent Investment Insights 31st July 2020 1597474493863bimalishaNo ratings yet
- Programmable Logic ControllerDocument27 pagesProgrammable Logic ControllerbimalishaNo ratings yet
- Bottlecapping PDFDocument2 pagesBottlecapping PDFbimalishaNo ratings yet
- Grounding Transformer FAQs - Pacific Crest Transformers - Custom Liquid Filled Transformers & RepairDocument8 pagesGrounding Transformer FAQs - Pacific Crest Transformers - Custom Liquid Filled Transformers & RepairVijai PrasathNo ratings yet
- Product Data Sheet: Resi9 - Miniature Circuit-Breaker - 2P - 6 A - C Curve - 400 V - 3000 ADocument2 pagesProduct Data Sheet: Resi9 - Miniature Circuit-Breaker - 2P - 6 A - C Curve - 400 V - 3000 Aimam wardhanaNo ratings yet
- Bulb Flat Sizes, Dimensions and Weight - Steel Bulb Flats - Weight Table - Rushmore Enterprises IncDocument3 pagesBulb Flat Sizes, Dimensions and Weight - Steel Bulb Flats - Weight Table - Rushmore Enterprises IncHerlambang Miracle YudhianNo ratings yet
- Inforamtion SecurityDocument151 pagesInforamtion SecurityimranNo ratings yet
- Your Strategy Needs A Strategy: IMD FacultyDocument4 pagesYour Strategy Needs A Strategy: IMD FacultyJuan Manuel SalasNo ratings yet
- Industry 4.0: In-Depth Market Analysis: Industries & MarketsDocument146 pagesIndustry 4.0: In-Depth Market Analysis: Industries & MarketsXinwei LinNo ratings yet
- Clarion Cx501e ManualDocument32 pagesClarion Cx501e Manualcostas potamosNo ratings yet
- FinnOne Neo DetailsDocument12 pagesFinnOne Neo DetailsSujith SNo ratings yet
- C C C CCCCCCCCCCCC CC C C CDocument22 pagesC C C CCCCCCCCCCCC CC C C Csanjaykumar3989No ratings yet
- EIM 6 Lesson 1Document19 pagesEIM 6 Lesson 1Victor Rosales100% (1)
- Os Module of PythonDocument73 pagesOs Module of Pythonl.a.lalit viyogiNo ratings yet
- Festo Mind Sight Complimentary AccessDocument3 pagesFesto Mind Sight Complimentary AccesskareemNo ratings yet
- First Industrial RevolutionDocument2 pagesFirst Industrial RevolutionRylleNo ratings yet
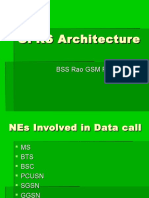
- GPRS Architecture BSSRDocument29 pagesGPRS Architecture BSSRMahesh Kumar NigamNo ratings yet
- Etech Final TGDocument22 pagesEtech Final TGKarrie Mae Golilao100% (1)
- KMS at XeroxDocument3 pagesKMS at XeroxPriyanka DargadNo ratings yet
- 14 Werum BR PAS-X TrackTrace enDocument2 pages14 Werum BR PAS-X TrackTrace enBREWSKINo ratings yet
- Problem Bank 06: Assignment IDocument10 pagesProblem Bank 06: Assignment IPuneethHjNo ratings yet
- C SISPM1040 384 LRT B User GuideDocument202 pagesC SISPM1040 384 LRT B User GuideCHELO LARANo ratings yet
- F1009, Ganga Vertica, Neeladri Road, Electronic City Phase 1, Bangalore-560100Document3 pagesF1009, Ganga Vertica, Neeladri Road, Electronic City Phase 1, Bangalore-560100AkashSinghNo ratings yet
- Report 2, Phy270Document9 pagesReport 2, Phy270Georges MaaloufNo ratings yet
- PD78F0138ADocument558 pagesPD78F0138APoon Electronic Training CentreNo ratings yet
- Methodology: Define ProblemDocument4 pagesMethodology: Define ProblemMuhammad SyahmieNo ratings yet
- OL200 LED Low Intensity Obstruction Light - Datasheet - v202008Document2 pagesOL200 LED Low Intensity Obstruction Light - Datasheet - v202008REDDOT SIGNALNo ratings yet
- Operator Manual, Supercharger 60 R3.0: Page 1 of 62Document62 pagesOperator Manual, Supercharger 60 R3.0: Page 1 of 62nixon_b_2000No ratings yet
- SAP S/4Hana Financial Closing Cockpit: On This PageDocument5 pagesSAP S/4Hana Financial Closing Cockpit: On This PagePasha Shaikh MehboobNo ratings yet