You might also like
- How To Build A Power Inverter Circuit PDFDocument11 pagesHow To Build A Power Inverter Circuit PDFVlad Vlad100% (1)
- IVR-1200MPPT/IVR-2400MPPT User ManualDocument17 pagesIVR-1200MPPT/IVR-2400MPPT User ManualTesla Technology GroupNo ratings yet
- Sureshsir Transcribe FBC SPWMDocument19 pagesSureshsir Transcribe FBC SPWMpriyanshum230825eeNo ratings yet
- PM10 PDFDocument4 pagesPM10 PDFItsy BitsyNo ratings yet
- Lec16 PDFDocument29 pagesLec16 PDFSai Krishna VelichetiNo ratings yet
- PWM AC-DC Converter LectureDocument18 pagesPWM AC-DC Converter LectureDebashis ChakrabrtyNo ratings yet
- One Cycle ControlDocument9 pagesOne Cycle ControlNithin SebastianNo ratings yet
- IC Questions With Ans AnilsirDocument22 pagesIC Questions With Ans AnilsirAniil J Kumaar50% (2)
- Sureshsir Transcribe HBCControl 2Document24 pagesSureshsir Transcribe HBCControl 2priyanshum230825eeNo ratings yet
- Lecture 8Document20 pagesLecture 8Muhammad UsmanNo ratings yet
- Tube CAD Journal Jan 2001Document29 pagesTube CAD Journal Jan 2001maher9No ratings yet
- 4 Zener Voltage Regulator Diode Clippers ClampersDocument7 pages4 Zener Voltage Regulator Diode Clippers ClampersmakreloadedNo ratings yet
- Error Amplifier Design and ApplicationsDocument6 pagesError Amplifier Design and ApplicationsGhulam Abbas100% (1)
- Marine Diesel Engineviva QuestionDocument18 pagesMarine Diesel Engineviva Questionisteeaq.mmNo ratings yet
- Unit 1. B. Operational AmplifierDocument21 pagesUnit 1. B. Operational AmplifierRonald ConstantinoNo ratings yet
- Top 10 Fundamental Operational Amplifiers CircuitsDocument7 pagesTop 10 Fundamental Operational Amplifiers CircuitsNguyễnVănTuấnNo ratings yet
- DC-DC Boost Converter GuideDocument6 pagesDC-DC Boost Converter GuideLuis FabreNo ratings yet
- RF Probe How ToDocument3 pagesRF Probe How ToMike YoungNo ratings yet
- Voltage RegulationDocument6 pagesVoltage RegulationjaykantpanditNo ratings yet
- Electronic Circuit Breaker Project ProposalDocument5 pagesElectronic Circuit Breaker Project ProposalTanzeel AhmadNo ratings yet
- Buck Converter Experiment-Comments NatanaelDocument2 pagesBuck Converter Experiment-Comments NatanaelNatanael Acencio RijoNo ratings yet
- Conv DC-DC Paper ENglishDocument5 pagesConv DC-DC Paper ENglishpepe890305No ratings yet
- Dasar LDR DAN THERMISTORDocument12 pagesDasar LDR DAN THERMISTORAJI ALLFIZIDDINNo ratings yet
- JAT501 DesignDocument6 pagesJAT501 DesignComputer World sbyNo ratings yet
- Mod-01 Lec-36 Lecture-36.High Voltage DC TransmissionDocument13 pagesMod-01 Lec-36 Lecture-36.High Voltage DC TransmissionKomanghNo ratings yet
- Flyback Converter DesignDocument7 pagesFlyback Converter DesignRobert AlbuquerqueNo ratings yet
- Power Electronics Prof. B. G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 21Document16 pagesPower Electronics Prof. B. G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 21Debashis ChakrabrtyNo ratings yet
- High Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurDocument27 pagesHigh Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurvinoNo ratings yet
- Final ReviewDocument19 pagesFinal ReviewSanyam JainNo ratings yet
- SEPIC Converter Design - Buck Boost Converter DesignDocument1 pageSEPIC Converter Design - Buck Boost Converter DesignLibroLivroNo ratings yet
- High Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurDocument27 pagesHigh Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurAasim MallickNo ratings yet
- Block Diagram of Arduino Based Over Voltage RelayDocument19 pagesBlock Diagram of Arduino Based Over Voltage RelaydtfrhgfdNo ratings yet
- The Transistor Amplifier: Understanding Faults and Improving Circuit DesignDocument75 pagesThe Transistor Amplifier: Understanding Faults and Improving Circuit DesignHITESHRISHINo ratings yet
- Power Factor Correction Using Boost ConverterDocument24 pagesPower Factor Correction Using Boost Converterফারহানা আক্তার গল্পNo ratings yet
- How To Design A Voltage Controlled Current Source Circuit Using Op-AmpDocument8 pagesHow To Design A Voltage Controlled Current Source Circuit Using Op-AmpreynielNo ratings yet
- How to Bias an Op-Amp</TITLEDocument8 pagesHow to Bias an Op-Amp</TITLEveerasundarNo ratings yet
- Understanding The Right-Half-Plane ZeroDocument3 pagesUnderstanding The Right-Half-Plane ZerokurabyqldNo ratings yet
- Buck RegulatorsDocument14 pagesBuck Regulatorsarunji_phoenixNo ratings yet
- How To Connect A Voltage Regulator in A CircuitDocument3 pagesHow To Connect A Voltage Regulator in A CircuitRajNo ratings yet
- LabManual Chpt13Document8 pagesLabManual Chpt13अमरेश झाNo ratings yet
- Op Amps BasicsDocument10 pagesOp Amps BasicsinformagicNo ratings yet
- HVDC Transmission ComparisonDocument26 pagesHVDC Transmission ComparisonKandarp BhattNo ratings yet
- Current Transformer - Part - IDocument23 pagesCurrent Transformer - Part - IsrifaceNo ratings yet
- Lec30 - 2 NewDocument16 pagesLec30 - 2 NewkillerNo ratings yet
- Comparators and Bistable Circuits GuideDocument6 pagesComparators and Bistable Circuits GuideMagesh KumarNo ratings yet
- Slup 129Document11 pagesSlup 129Sameer NandanNo ratings yet
- End Semester Project Report PDFDocument7 pagesEnd Semester Project Report PDFMuhammad Talal FarhanNo ratings yet
- 101 200TransistorCircuitsDocument103 pages101 200TransistorCircuitssabNo ratings yet
- Buck-boost and Flyback Converter GuideDocument11 pagesBuck-boost and Flyback Converter Guidekima lachgarNo ratings yet
- Basic Electronics_Ch-4Document12 pagesBasic Electronics_Ch-42203051050594No ratings yet
- DC To DC ConversionDocument8 pagesDC To DC ConversionMichael-Denis NeculaNo ratings yet
- Topic - Voltage RegulatorDocument43 pagesTopic - Voltage RegulatorAryan Singh JadaunNo ratings yet
- Voltage RegulationDocument3 pagesVoltage RegulationAmmiel BuisingNo ratings yet
- Provides A DC Output Voltage That Is Independent of Input Voltage, Output Load Current and TemperatureDocument10 pagesProvides A DC Output Voltage That Is Independent of Input Voltage, Output Load Current and Temperaturerica_escladaNo ratings yet
- Current AmplifierDocument4 pagesCurrent AmplifierManik Prabhu ChillalNo ratings yet
- Linear Amplifiers and OpAmps FundamentalsDocument19 pagesLinear Amplifiers and OpAmps FundamentalsAnimesh GhoshNo ratings yet
- ServomechanismsDocument25 pagesServomechanismsMansour Bu MusabNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Easy(er) Electrical Principles for General Class Ham License (2015-2019)From EverandEasy(er) Electrical Principles for General Class Ham License (2015-2019)Rating: 5 out of 5 stars5/5 (1)
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- Elmore Delay : Tree Walk Computing Recipe: Do ThisDocument4 pagesElmore Delay : Tree Walk Computing Recipe: Do ThisItsy BitsyNo ratings yet
- From Wire Segments To RC Tree: Big Idea: Replace Straight Wire Segment WithDocument4 pagesFrom Wire Segments To RC Tree: Big Idea: Replace Straight Wire Segment WithItsy BitsyNo ratings yet
- This Is It: RC TreeDocument4 pagesThis Is It: RC TreeItsy BitsyNo ratings yet
- Computational Strategy: One ApproachDocument4 pagesComputational Strategy: One ApproachItsy BitsyNo ratings yet
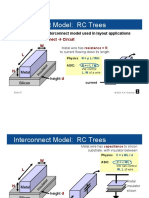
- Interconnect Model: RC Trees: Most Popular Interconnect Model Used in Layout Applications FirstDocument4 pagesInterconnect Model: RC Trees: Most Popular Interconnect Model Used in Layout Applications FirstItsy BitsyNo ratings yet
- Elmore Example: RC Tree For The Interconnect AloneDocument4 pagesElmore Example: RC Tree For The Interconnect AloneItsy BitsyNo ratings yet
- Using Slack For Path Reporting: Useful Slack Property: All Nodes On Longest Path HaveDocument4 pagesUsing Slack For Path Reporting: Useful Slack Property: All Nodes On Longest Path HaveItsy BitsyNo ratings yet
- Circuits Aside: What Is Elmore Delay?Document4 pagesCircuits Aside: What Is Elmore Delay?Itsy BitsyNo ratings yet
- Worst Case Path Reporting: Example: Expand, Reach, ReachDocument4 pagesWorst Case Path Reporting: Example: Expand, Reach, ReachItsy BitsyNo ratings yet
- 11 Vlsicad Route 49 PDFDocument2 pages11 Vlsicad Route 49 PDFItsy BitsyNo ratings yet
- Analyzing This Example: Look at ThoseDocument4 pagesAnalyzing This Example: Look at ThoseItsy BitsyNo ratings yet
- How To Compute Rats? Recursively: - P - S ClockDocument4 pagesHow To Compute Rats? Recursively: - P - S ClockItsy BitsyNo ratings yet
- Let's Do A Bigger Example: Delays Are On Edges Let Clock Cycle BeDocument4 pagesLet's Do A Bigger Example: Delays Are On Edges Let Clock Cycle BeItsy BitsyNo ratings yet
- Vlsi Cad:: Logic To LayoutDocument4 pagesVlsi Cad:: Logic To LayoutItsy BitsyNo ratings yet
- 11 Vlsicad Route 43 PDFDocument2 pages11 Vlsicad Route 43 PDFItsy BitsyNo ratings yet
- 11-Vlsicad-Route PDFDocument98 pages11-Vlsicad-Route PDFItsy BitsyNo ratings yet
- 11 Vlsicad Route 47 PDFDocument2 pages11 Vlsicad Route 47 PDFItsy BitsyNo ratings yet
- 11 Vlsicad Route 38 PDFDocument2 pages11 Vlsicad Route 38 PDFItsy BitsyNo ratings yet
- What Global Routing Does: Makes Sure Overall Wiring Congestion Is ReasonableDocument2 pagesWhat Global Routing Does: Makes Sure Overall Wiring Congestion Is ReasonableItsy BitsyNo ratings yet
- 11 Vlsicad Route 45 PDFDocument2 pages11 Vlsicad Route 45 PDFItsy BitsyNo ratings yet
- 11 Vlsicad Route 46 PDFDocument2 pages11 Vlsicad Route 46 PDFItsy BitsyNo ratings yet
- 11 Vlsicad Route 33 PDFDocument2 pages11 Vlsicad Route 33 PDFItsy BitsyNo ratings yet
- 11 Vlsicad Route 40 PDFDocument2 pages11 Vlsicad Route 40 PDFItsy BitsyNo ratings yet
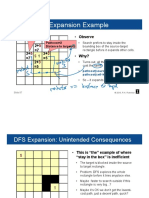
- Depth-First Expansion Example: Observe 2+ 7 2+ 5 2+ 5Document2 pagesDepth-First Expansion Example: Observe 2+ 7 2+ 5 2+ 5Itsy BitsyNo ratings yet
- 11 Vlsicad Route 41 PDFDocument2 pages11 Vlsicad Route 41 PDFItsy BitsyNo ratings yet
- 11 Vlsicad Route 39 PDFDocument2 pages11 Vlsicad Route 39 PDFItsy BitsyNo ratings yet
- Smarter Search: Maze Search With Predictor: Two Parts: Plain Maze Router Smarter Maze RouterDocument2 pagesSmarter Search: Maze Search With Predictor: Two Parts: Plain Maze Router Smarter Maze RouterItsy BitsyNo ratings yet
- Plain Maze Routing Revisited: Key AssumptionsDocument2 pagesPlain Maze Routing Revisited: Key AssumptionsItsy BitsyNo ratings yet
- 11 Vlsicad Route 23 PDFDocument2 pages11 Vlsicad Route 23 PDFItsy BitsyNo ratings yet
- 11 Vlsicad Route 35 PDFDocument2 pages11 Vlsicad Route 35 PDFItsy BitsyNo ratings yet
- 9A02504 Power ElectronicsDocument1 page9A02504 Power ElectronicssivabharathamurthyNo ratings yet
- Group 1 CAPSTONE PAPERDocument30 pagesGroup 1 CAPSTONE PAPEREdward John AlawagNo ratings yet
- 1NK60Z PDFDocument14 pages1NK60Z PDFkimxoNo ratings yet
- Transducer CatalogDocument138 pagesTransducer CatalogEric KerrNo ratings yet
- Transformador de PulsoDocument22 pagesTransformador de PulsoFreddy de los SantosNo ratings yet
- Programmable Solar Charge Controller with Nightlight FunctionDocument7 pagesProgrammable Solar Charge Controller with Nightlight FunctionCristian PopescuNo ratings yet
- Power ElexDocument38 pagesPower ElexTin PelingonNo ratings yet
- Quick Guide to Solar Inverter InstallationDocument15 pagesQuick Guide to Solar Inverter InstallationSalman ArainNo ratings yet
- 19 Boiler ESP System Commissioning Procedure-Töàtéëtö TÖñs Ÿt +T+ƑF Âf Ò Ä Û+Document31 pages19 Boiler ESP System Commissioning Procedure-Töàtéëtö TÖñs Ÿt +T+ƑF Âf Ò Ä Û+kvsagarNo ratings yet
- Omron Relay LY CatalogDocument14 pagesOmron Relay LY CatalogPhuong VuNo ratings yet
- GLOFADocument60 pagesGLOFArobertoNo ratings yet
- Verification of Norton TheoremDocument3 pagesVerification of Norton TheoremImam Mehedi HasanNo ratings yet
- TransformersDocument58 pagesTransformersIan D ValdeztamonNo ratings yet
- Operation ManualDocument391 pagesOperation ManualMilosglNo ratings yet
- Chapter 7 P2Document20 pagesChapter 7 P2Amelia SuidNo ratings yet
- E5EZ DatasheetDocument5 pagesE5EZ DatasheetJenniferValleNo ratings yet
- Program FRT12 Flow Rate Totaliser for Accurate Flow MeasurementDocument12 pagesProgram FRT12 Flow Rate Totaliser for Accurate Flow Measurementvallolet_sb5185No ratings yet
- IM1000Document20 pagesIM1000MOHD NAJMAN BIN MUDANo ratings yet
- Power Electronics - Lab ManualDocument166 pagesPower Electronics - Lab ManualUsman Waheed100% (1)
- ELTR115 Sec1Document96 pagesELTR115 Sec1Tshering WangdiNo ratings yet
- Fundamentals of AC/DC: Preparatory Electricity and Electronics Training SystemDocument40 pagesFundamentals of AC/DC: Preparatory Electricity and Electronics Training SystemMi LuanaNo ratings yet
- Circuit Analysis TheoremsDocument44 pagesCircuit Analysis Theoremsfalilv9580% (20)
- PX 7102 Analysis of Power ConvertersDocument3 pagesPX 7102 Analysis of Power Convertersmalathynarayani100% (1)
- F3DA04-6R F3DA08-5R一般规格(11年 第1版)Document6 pagesF3DA04-6R F3DA08-5R一般规格(11年 第1版)赵先生No ratings yet
- ENP Liebert NX UPS SpecificationDocument5 pagesENP Liebert NX UPS SpecificationChathura DharmasenaNo ratings yet
- Tutorial Sheet4 Three-PhaseDocument2 pagesTutorial Sheet4 Three-PhasehaimantiNo ratings yet
- Inveter-UPS Size With Battery BankDocument20 pagesInveter-UPS Size With Battery BankRezaNadianNo ratings yet
- Science8 q1 Mod8 Electrical-Circuit FINAL08122021Document25 pagesScience8 q1 Mod8 Electrical-Circuit FINAL08122021Jessa Marie JardinNo ratings yet
- Textbook of Applied ElectronicsDocument8 pagesTextbook of Applied Electronicsshehnasheh99No ratings yet