You might also like
- The Biology of Vascular Epiphytes Zotz 2016 PDFDocument292 pagesThe Biology of Vascular Epiphytes Zotz 2016 PDFEvaldo Pape100% (1)
- 2.2 Pipelining: AsynchronousDocument24 pages2.2 Pipelining: Asynchronouseshankapur25% (4)
- Catalogue TecoDocument8 pagesCatalogue TecopriyantohonggonoNo ratings yet
- Helmut Lethen - Cool Conduct - The Culture of Distance in Weimar Germany (Weimar and Now - German Cultural Criticism) - University of California Press (2001) PDFDocument265 pagesHelmut Lethen - Cool Conduct - The Culture of Distance in Weimar Germany (Weimar and Now - German Cultural Criticism) - University of California Press (2001) PDFJaco CMNo ratings yet
- Past Simple Past ContinuousDocument2 pagesPast Simple Past ContinuousEsmeralda Gonzalez80% (5)
- Sols Book PDFDocument120 pagesSols Book PDFtt_aljobory3911100% (1)
- Loveology: God. Love. Marriage. Sex. and The Never-Ending Story of Male and Female. by John Mark Comer, SamplerDocument32 pagesLoveology: God. Love. Marriage. Sex. and The Never-Ending Story of Male and Female. by John Mark Comer, SamplerZondervan40% (5)
- Feminist Criticism in Frankenstein, Equus and The Turn of The ScrewDocument4 pagesFeminist Criticism in Frankenstein, Equus and The Turn of The ScrewLucia ToledoNo ratings yet
- Questions PapersDocument40 pagesQuestions PapersAMAN RAJNo ratings yet
- b1 Preliminary 2020 Vocabulary List PDFDocument51 pagesb1 Preliminary 2020 Vocabulary List PDFlynNo ratings yet
- b1 Preliminary 2020 Vocabulary List PDFDocument51 pagesb1 Preliminary 2020 Vocabulary List PDFlynNo ratings yet
- Computer Network Gate MCQ QuesDocument40 pagesComputer Network Gate MCQ QuesAMAN RAJNo ratings yet
- Prenatal DevelopmentDocument23 pagesPrenatal DevelopmentLF90No ratings yet
- Catch Me If You Can WorksheetDocument4 pagesCatch Me If You Can WorksheetHurleyHugoNo ratings yet
- Рибовалова Periods of the translation theory developmentDocument25 pagesРибовалова Periods of the translation theory developmentValya ChzhaoNo ratings yet
- Database Management System: Assignment 7 ReviewDocument10 pagesDatabase Management System: Assignment 7 ReviewjyothiNo ratings yet
- Faculty of Engineering: Instructions To StudentsDocument3 pagesFaculty of Engineering: Instructions To StudentsHimanish BhattacharyaNo ratings yet
- Concurrency Improves ThroughputDocument38 pagesConcurrency Improves ThroughputFiroj AnsariNo ratings yet
- Ss Zg526 Ec-2r First Sem 2018-2019Document3 pagesSs Zg526 Ec-2r First Sem 2018-2019RBSNo ratings yet
- Database Management System: Assignment 8 - ConciseDocument10 pagesDatabase Management System: Assignment 8 - ConciseRoshanNo ratings yet
- Csi ZG518 Ec-3r Second Sem 2021-2022Document8 pagesCsi ZG518 Ec-3r Second Sem 2021-2022anishjiNo ratings yet
- Cs 6302 Dbms 1718 Odd Iat2 With KeyDocument3 pagesCs 6302 Dbms 1718 Odd Iat2 With KeyhelloNo ratings yet
- Sample Comprehensive ExamDocument10 pagesSample Comprehensive ExamEng-Mushtaq HejairaNo ratings yet
- Distributed Computing Exam Vector Clock SolutionDocument12 pagesDistributed Computing Exam Vector Clock SolutionRBSNo ratings yet
- pps ST 1 paper 2021-22-sem-1-modified (1)Document2 pagespps ST 1 paper 2021-22-sem-1-modified (1)lazyyy199No ratings yet
- Shri Ramdeobaba College of Engineering and Management, Nagpur - 440013Document2 pagesShri Ramdeobaba College of Engineering and Management, Nagpur - 440013Test IngNo ratings yet
- Kimathi University Control Engineering ExamDocument7 pagesKimathi University Control Engineering ExamSTAR BOYNo ratings yet
- SES AlgorithmDocument23 pagesSES Algorithmduong_mf_682450010No ratings yet
- Transaction Processing & Concurrency Control 1)Document7 pagesTransaction Processing & Concurrency Control 1)Shokry MohamedNo ratings yet
- NWC203 CDocument4 pagesNWC203 Cthanhthanh16102004No ratings yet
- Prof. Anantha Chandrakasan and Prof. Don TroxelDocument10 pagesProf. Anantha Chandrakasan and Prof. Don TroxelCristian CastroNo ratings yet
- A35530 - Question - Electronic Engineering Exam Jan 2023Document10 pagesA35530 - Question - Electronic Engineering Exam Jan 2023Charlie CoxNo ratings yet
- Dte QBDocument54 pagesDte QBitachisan973No ratings yet
- General Instructions: Exam Is Closed Book. Total Time Is 3 Hrs. Calculator Is Allowed. Write To The Point Answers. Write NeatlyDocument3 pagesGeneral Instructions: Exam Is Closed Book. Total Time Is 3 Hrs. Calculator Is Allowed. Write To The Point Answers. Write NeatlypranavjibhakateNo ratings yet
- Assignment 2 Mod 3 - SolutionDocument11 pagesAssignment 2 Mod 3 - SolutionRohitGoswami100% (1)
- Embedded Systems Design ExamDocument21 pagesEmbedded Systems Design ExamSasmitha KalharaNo ratings yet
- SE183134 NWC203c 02Document5 pagesSE183134 NWC203c 02quanghoaluu1No ratings yet
- DCN EC-3028 Mid Semester Autumn 2022 Question PaperDocument2 pagesDCN EC-3028 Mid Semester Autumn 2022 Question PaperSk sarkarNo ratings yet
- Homework Problem Set For Weeks 6 and 7: CF SubstrateDocument5 pagesHomework Problem Set For Weeks 6 and 7: CF SubstratePriyanka KatariaNo ratings yet
- Problem Set 1Document6 pagesProblem Set 1AnushaNo ratings yet
- Interfacing C and TMS320C6713 Assembly Language (Part-I) : Abdullah A. WardakDocument7 pagesInterfacing C and TMS320C6713 Assembly Language (Part-I) : Abdullah A. WardakCasly08No ratings yet
- Mecom1 Question PaperDocument12 pagesMecom1 Question Paperpajadhav100% (1)
- NB:-Write The Answers in Your Own Way and Do Not Copy From OtherDocument2 pagesNB:-Write The Answers in Your Own Way and Do Not Copy From OtherSayanMaitiNo ratings yet
- Assignment 3 With SolutionDocument6 pagesAssignment 3 With Solutionanoopaman5No ratings yet
- DE - KOE 039 - Question BankDocument6 pagesDE - KOE 039 - Question Bankyash vatsNo ratings yet
- Residence Time Distribution of a Packed ColumnDocument4 pagesResidence Time Distribution of a Packed Columnhannan1993No ratings yet
- HE180277 NWC203c 02Document4 pagesHE180277 NWC203c 02phungduchieu6996No ratings yet
- Mid Sem 3Document11 pagesMid Sem 3BROJO CHAND GAYENNo ratings yet
- ComputerNetworks ClassTest2 SolutionsDocument3 pagesComputerNetworks ClassTest2 Solutionshuyencttde180614No ratings yet
- ME 464 - Final - Exam - StudentDocument4 pagesME 464 - Final - Exam - StudentFahad IbrarNo ratings yet
- PDFDocument5 pagesPDFDebolina RoyNo ratings yet
- 18EE0216-Power Systems - IIDocument7 pages18EE0216-Power Systems - IIfaisal sbennaNo ratings yet
- Bee4203 Power Electronics s1 160222 PDFDocument6 pagesBee4203 Power Electronics s1 160222 PDFAfiq ZahinNo ratings yet
- OS exam questions on threads, scheduling, synchronizationDocument2 pagesOS exam questions on threads, scheduling, synchronizationShubham GargNo ratings yet
- Conveyor Belt Calculations for Surface Coal MineDocument6 pagesConveyor Belt Calculations for Surface Coal MineSergio DiazNo ratings yet
- ECS 251 Distributed Systems Outline for January 23, 2001Document11 pagesECS 251 Distributed Systems Outline for January 23, 2001Biswajit Das100% (1)
- M.M.M. University of Technology, Gorakhpur Wireless Communication (BEC-43) Tutorial Sheet (Unit IV)Document2 pagesM.M.M. University of Technology, Gorakhpur Wireless Communication (BEC-43) Tutorial Sheet (Unit IV)Prisha SinghNo ratings yet
- Cse PDFDocument33 pagesCse PDFSha Nkar JavleNo ratings yet
- MIT6004 S 09 Tutor 06Document7 pagesMIT6004 S 09 Tutor 06Abhijith RanguduNo ratings yet
- SIR SYED UNIVERSITY OF ENGINEERING & TECHNOLOGY SOFTWARE ENGINEERING DEPARTMENT SPRING 2022 COMPUTER COMMUNICATION & NETWORKS (SWE-306T) ASSIGNMENT 3 SOLUTIONDocument3 pagesSIR SYED UNIVERSITY OF ENGINEERING & TECHNOLOGY SOFTWARE ENGINEERING DEPARTMENT SPRING 2022 COMPUTER COMMUNICATION & NETWORKS (SWE-306T) ASSIGNMENT 3 SOLUTIONDeeni BaateinNo ratings yet
- Case Study Solution - Network of QueuesDocument26 pagesCase Study Solution - Network of Queuesvasu_ks438No ratings yet
- Queuing Formulas: 1 Notation 2Document6 pagesQueuing Formulas: 1 Notation 2Zack emeryNo ratings yet
- Test 1 en PrintedDocument8 pagesTest 1 en PrintedTrần Việt HoàngNo ratings yet
- Database Management System, (CS-2004), Spring Semester Examination 2021Document14 pagesDatabase Management System, (CS-2004), Spring Semester Examination 2021shivamjana40No ratings yet
- CC and NetDocument4 pagesCC and NetzainabNo ratings yet
- X L W C: Motor Shaft CapacitiveDocument14 pagesX L W C: Motor Shaft CapacitiveMuhamadFirdaus0% (1)
- A New Control Technique For Multilevel Cascaded H-Bridge InvertersDocument6 pagesA New Control Technique For Multilevel Cascaded H-Bridge InvertersEditor IJRITCCNo ratings yet
- Revision (Editing) of Translations. Translators' Self-RevisionDocument28 pagesRevision (Editing) of Translations. Translators' Self-RevisionValya ChzhaoNo ratings yet
- Editing in Translation: Advantages and Disadvantages in Quality AssuranceDocument9 pagesEditing in Translation: Advantages and Disadvantages in Quality AssuranceValya ChzhaoNo ratings yet
- To Understand The Difference Between The Present Continuous and The Present Simple, and Use These Two Tenses in Controlled and Freer PracticesDocument3 pagesTo Understand The Difference Between The Present Continuous and The Present Simple, and Use These Two Tenses in Controlled and Freer PracticesValya ChzhaoNo ratings yet
- A Brief Overview of The Wine-Making Process: 1. Growing and Harvesting GrapesDocument5 pagesA Brief Overview of The Wine-Making Process: 1. Growing and Harvesting GrapesValya ChzhaoNo ratings yet
- Culture-Based Text Analysis in Translation. A Vision For ComprehensionDocument17 pagesCulture-Based Text Analysis in Translation. A Vision For ComprehensionValya ChzhaoNo ratings yet
- A Brief Overview of The Wine-Making Process: 1. Growing and Harvesting GrapesDocument5 pagesA Brief Overview of The Wine-Making Process: 1. Growing and Harvesting GrapesValya ChzhaoNo ratings yet
- Distributed Systems Assessment SolvedDocument7 pagesDistributed Systems Assessment SolvedValya ChzhaoNo ratings yet
- Distributed Systems Assessment SolvedDocument7 pagesDistributed Systems Assessment SolvedValya ChzhaoNo ratings yet
- 1 1 Notion and Characteristics of Culinary Terminology in The FrameworkDocument6 pages1 1 Notion and Characteristics of Culinary Terminology in The FrameworkValya ChzhaoNo ratings yet
- OSCE Election Observation Handbook PDFDocument120 pagesOSCE Election Observation Handbook PDFAnonymous QobQt71IFQNo ratings yet
- Komissarov V N Koralova A L Praktikum Po Perevodu S Angliysk PDFDocument112 pagesKomissarov V N Koralova A L Praktikum Po Perevodu S Angliysk PDFAilina ErbilNo ratings yet
- BuildingDocument156 pagesBuildingMaya MayaNo ratings yet
- Unit 14 Food Storage: StructureDocument13 pagesUnit 14 Food Storage: StructureRiddhi KatheNo ratings yet
- Itm Guia Rapida Tds 600 Tipo4 Ed1 EspDocument148 pagesItm Guia Rapida Tds 600 Tipo4 Ed1 Espcamel2003No ratings yet
- ACHD 07 The Innsmouth ConspiracyDocument6 pagesACHD 07 The Innsmouth ConspiracyJNo ratings yet
- PAPD Cable glands for hazardous areasDocument2 pagesPAPD Cable glands for hazardous areasGulf Trans PowerNo ratings yet
- Primary Maths Dissertation ExamplesDocument8 pagesPrimary Maths Dissertation ExamplesPaperWritersAlbuquerque100% (1)
- Biopharma SolutionDocument7 pagesBiopharma SolutionLili O Varela100% (1)
- MC61ADocument5 pagesMC61AAlison Foster100% (1)
- LOGIK Fridge Freezer With Water Dispenser LSD55W18 ManualDocument20 pagesLOGIK Fridge Freezer With Water Dispenser LSD55W18 Manualfbunt2777No ratings yet
- A-PDF Watermark DEMO Purchase RemoveDocument4 pagesA-PDF Watermark DEMO Purchase RemoveGaurav JoshiNo ratings yet
- DEF CON 30 - Hadrien Barral - Emoji Shellcoding ?, ?, and ? - PresentationDocument141 pagesDEF CON 30 - Hadrien Barral - Emoji Shellcoding ?, ?, and ? - Presentationkumar sanjayNo ratings yet
- CCNA Security Instructor Lab Manual v1 - p8Document1 pageCCNA Security Instructor Lab Manual v1 - p8MeMe AmroNo ratings yet
- ResearchDocument44 pagesResearchGwend MemoracionNo ratings yet
- Mac 2009Document60 pagesMac 2009Ridwan Pramudya100% (1)
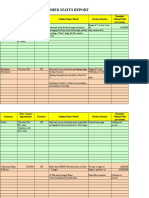
- Customer Status Update Report 27th January 2015 ColourDocument20 pagesCustomer Status Update Report 27th January 2015 ColourmaryNo ratings yet
- JuliadatascienceDocument214 pagesJuliadatascienceFulvio JoséNo ratings yet
- Oxidation of CopperDocument21 pagesOxidation of CopperAmeen ShahidNo ratings yet
- Summer Training Report at B H E L BhopalDocument66 pagesSummer Training Report at B H E L BhopalshantanuNo ratings yet
- Weapon Board: Shaving RazorDocument15 pagesWeapon Board: Shaving RazorEzio SartoraNo ratings yet
- Biometric Fingerprint Architecture For Home Security System: November 2016Document6 pagesBiometric Fingerprint Architecture For Home Security System: November 2016Kollimarala Srinivasa raoNo ratings yet
- Valplast: Flexible, Esthetic Partial DenturesDocument4 pagesValplast: Flexible, Esthetic Partial Denturesአነኬ ቹህቺዶሃሠኪቺጆቺNo ratings yet
- AGUILA Automatic Coffee Machine User Manual - Instructions for Use EN DE FR ITDocument19 pagesAGUILA Automatic Coffee Machine User Manual - Instructions for Use EN DE FR ITPena Park HotelNo ratings yet