You might also like
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Week03 Open MethodsDocument23 pagesWeek03 Open MethodsFatinnnnnnNo ratings yet
- 07 Fenton SimulationDocument52 pages07 Fenton SimulationAndres Pino100% (2)
- Numerical Methods With ApplicationsDocument49 pagesNumerical Methods With Applicationsrazlan ghazaliNo ratings yet
- Input Data Analysis (3) Goodness-of-Fit TestsDocument28 pagesInput Data Analysis (3) Goodness-of-Fit Testsmohanpakkurthi8397697No ratings yet
- Topic10 WrittenDocument27 pagesTopic10 Writtenoreowhite111No ratings yet
- LM Week1 1 2019Document28 pagesLM Week1 1 2019Neel PatelNo ratings yet
- Module 8 Applications (Handout)Document14 pagesModule 8 Applications (Handout)Lyka Soriano MopasNo ratings yet
- Algorithms Process OptimizationDocument5 pagesAlgorithms Process OptimizationKakashi HatakeNo ratings yet
- Bayesian Credible IntervalDocument8 pagesBayesian Credible IntervalPrissy MakenaNo ratings yet
- Confidence Interval Estimation: L U L U L UDocument4 pagesConfidence Interval Estimation: L U L U L UmuralidharanNo ratings yet
- EC1 Final 2018 03 27 SolDocument3 pagesEC1 Final 2018 03 27 SolLucas BakkerNo ratings yet
- Measurements and UncertaintiesDocument53 pagesMeasurements and UncertaintiesDavid ReeseNo ratings yet
- 3: Divide and Conquer: Fourier Transform: PolynomialDocument8 pages3: Divide and Conquer: Fourier Transform: PolynomialIrmak ErkolNo ratings yet
- 3: Divide and Conquer: Fourier Transform: PolynomialDocument8 pages3: Divide and Conquer: Fourier Transform: PolynomialCajun SefNo ratings yet
- Epfl Machine Learning Final Exam 2021 SolutionsDocument21 pagesEpfl Machine Learning Final Exam 2021 SolutionsDiogo ValdiviesoNo ratings yet
- A Home Base To Excellence: Metode Terbuka (Open Methods)Document24 pagesA Home Base To Excellence: Metode Terbuka (Open Methods)ChavezNo ratings yet
- Chapter No. 04 Randomized Blocks, Latin Square, and Related Designs - Example (Presentation)Document23 pagesChapter No. 04 Randomized Blocks, Latin Square, and Related Designs - Example (Presentation)Sahib Ullah MukhlisNo ratings yet
- 1.1 Other Sampling Methods: The BootstrapDocument11 pages1.1 Other Sampling Methods: The Bootstrapaditya dasNo ratings yet
- S MM Unit I QB With AnswersDocument9 pagesS MM Unit I QB With Answersprakaash A SNo ratings yet
- Ordinary Least SquaresDocument17 pagesOrdinary Least SquaresRa'fat JalladNo ratings yet
- C P - PH 354: Omputational HysicsDocument12 pagesC P - PH 354: Omputational HysicsAthira GopalNo ratings yet
- Multiple Linear RegressionDocument18 pagesMultiple Linear RegressionWERU JOAN NYOKABINo ratings yet
- Lecture3-4 - Arghya - Week 2Document29 pagesLecture3-4 - Arghya - Week 2rohit kumarNo ratings yet
- Chapter 7: Estimating The Variance of An Estimate's Probability DistributionDocument31 pagesChapter 7: Estimating The Variance of An Estimate's Probability DistributionPoonam NaiduNo ratings yet
- Trend, Variation, and Universal KrigingDocument12 pagesTrend, Variation, and Universal KrigingAdrian Hanenda QadarismanNo ratings yet
- Fast Inverse Transform Sampling in One and Two Dimensions: Sheehan Olver Alex TownsendDocument10 pagesFast Inverse Transform Sampling in One and Two Dimensions: Sheehan Olver Alex TownsendKazi Abdul AhadNo ratings yet
- 08 - Ore Reserves IIDocument13 pages08 - Ore Reserves IIAneuk Naga BiruNo ratings yet
- Physical Chemistry Exam 1 KeyDocument8 pagesPhysical Chemistry Exam 1 KeyOsama GhaniNo ratings yet
- Basic Statistics Power PointDocument41 pagesBasic Statistics Power Pointchris merardNo ratings yet
- Statistics Study Guide: Matthew Chesnes The London School of Economics September 22, 2001Document22 pagesStatistics Study Guide: Matthew Chesnes The London School of Economics September 22, 2001kjneroNo ratings yet
- Basis ApproachesDocument9 pagesBasis ApproachesAgustin FloresNo ratings yet
- NewDocument32 pagesNewAbhishek SrivastavaNo ratings yet
- Module 4: Point Estimation: Statistics (OA3102)Document41 pagesModule 4: Point Estimation: Statistics (OA3102)Bresnev MorataNo ratings yet
- Stat (I) 4-6 MaterialDocument42 pagesStat (I) 4-6 Materialamareadios60No ratings yet
- ECON326 MidtermDocument5 pagesECON326 MidtermearlniewongcuirsNo ratings yet
- The Multiple Linear Regression Model: Version: 30-10-2023, 16:07Document17 pagesThe Multiple Linear Regression Model: Version: 30-10-2023, 16:07Saptangshu MannaNo ratings yet
- Data Analysis For Physics Laboratory: Standard ErrorsDocument5 pagesData Analysis For Physics Laboratory: Standard Errorsccouy123No ratings yet
- Reading 11: Correlation and Simple Regression: Calculate and Interpret The FollowingDocument15 pagesReading 11: Correlation and Simple Regression: Calculate and Interpret The FollowingACarringtonNo ratings yet
- 330 Lecture7 2015Document29 pages330 Lecture7 2015PETERNo ratings yet
- Homework 5: IEOR 165 (Spring 2016)Document3 pagesHomework 5: IEOR 165 (Spring 2016)Viet PhamNo ratings yet
- Prob RV Opt BasicsDocument35 pagesProb RV Opt BasicsjfdweijNo ratings yet
- DSP - Lab@4 TDocument4 pagesDSP - Lab@4 Tjadhavbhavesh891No ratings yet
- Polya Note PDFDocument7 pagesPolya Note PDFNashitah Abd KadirNo ratings yet
- Single Variable Calculus Assignment HelpDocument55 pagesSingle Variable Calculus Assignment HelpMath Homework SolverNo ratings yet
- Cosh X + Sinh X Cosh X - Sinh X.: e e y yDocument10 pagesCosh X + Sinh X Cosh X - Sinh X.: e e y yReeshav GhoshNo ratings yet
- On Discrete-Kirchhoff Plate Finite Elements: Implementation and Discretization ErrorDocument24 pagesOn Discrete-Kirchhoff Plate Finite Elements: Implementation and Discretization ErroreggedNo ratings yet
- On Discrete-Kirchhoff Plate Finite Elements: Implementation and Discretization ErrorDocument24 pagesOn Discrete-Kirchhoff Plate Finite Elements: Implementation and Discretization ErrorNourhan AymanNo ratings yet
- MIT14 30s09 Lec21Document7 pagesMIT14 30s09 Lec21NobodyNo ratings yet
- Probability and Statistics Project 1 - Topic 6Document23 pagesProbability and Statistics Project 1 - Topic 6Thảo Ly NgNo ratings yet
- Simple Regression and CorrelationDocument30 pagesSimple Regression and CorrelationFun Toosh345No ratings yet
- w4 - Statistical Modelling - GapsDocument23 pagesw4 - Statistical Modelling - GapsTuff BubaNo ratings yet
- Final NoteDocument23 pagesFinal NoteSandeep SahaNo ratings yet
- 2101 F 17 Assignment 1Document8 pages2101 F 17 Assignment 1dflamsheepsNo ratings yet
- Full Name of submitter: Cao Thị Minh Anh Student ID: IELSIU18002Document7 pagesFull Name of submitter: Cao Thị Minh Anh Student ID: IELSIU18002ManhNo ratings yet
- ECS452 4 U2Document6 pagesECS452 4 U2حيدر حسن حمودNo ratings yet
- Probabilistic Modelling-20230627Document21 pagesProbabilistic Modelling-20230627King RogoNo ratings yet
- Desingn of Experiments ch10Document5 pagesDesingn of Experiments ch10kannappanrajendranNo ratings yet
- Kriging Method and ApplicationDocument56 pagesKriging Method and Applicationsisi100% (1)
- Normal Probaility DistributionDocument13 pagesNormal Probaility DistributionAbdul TukurNo ratings yet
- Enzymes 3Document47 pagesEnzymes 3Saheed A BusuraNo ratings yet
- Exercise SolutionDocument5 pagesExercise SolutionSaheed A BusuraNo ratings yet
- DOE ProjectDocument16 pagesDOE ProjectSaheed A BusuraNo ratings yet
- Final Assignment 2 ChafikDocument16 pagesFinal Assignment 2 ChafikSaheed A BusuraNo ratings yet
- Project 1 PDFDocument1 pageProject 1 PDFSaheed A BusuraNo ratings yet
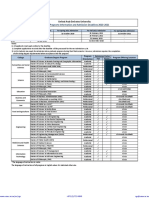
- Graduate Programs Information and Admission Deadlines 2020 2021Document1 pageGraduate Programs Information and Admission Deadlines 2020 2021Saheed A BusuraNo ratings yet
- 14.12final Report STAT 615 ModifiedDocument19 pages14.12final Report STAT 615 ModifiedSaheed A BusuraNo ratings yet
- Enzymes 2Document12 pagesEnzymes 2Saheed A BusuraNo ratings yet
- MosdicDocument1 pageMosdicSaheed A BusuraNo ratings yet
- T 2 F D N: HE Actorial EsigDocument33 pagesT 2 F D N: HE Actorial EsigSaheed A BusuraNo ratings yet
- Teaching Learning Resources Yara OtienoDocument8 pagesTeaching Learning Resources Yara Otienokitkat zaeNo ratings yet
- The Effect of Fraud Triangle in Detecting Financial Statement FraudDocument14 pagesThe Effect of Fraud Triangle in Detecting Financial Statement FraudEzra viollaNo ratings yet
- Analysis of Mine Haul Truck Fuel Consumption ReportDocument24 pagesAnalysis of Mine Haul Truck Fuel Consumption ReportMamita TsilaitraNo ratings yet
- BA Sample Paper Questions1 PDFDocument8 pagesBA Sample Paper Questions1 PDFkr1zhnaNo ratings yet
- Bitcoin As A Global Currency - Exploring The Wild West of CryptoDocument45 pagesBitcoin As A Global Currency - Exploring The Wild West of Cryptothe libyan guyNo ratings yet
- An Empirical Analysis of The Antecedents and Performance Consequences of Using The Moodle PlatformDocument5 pagesAn Empirical Analysis of The Antecedents and Performance Consequences of Using The Moodle Platformsamas7480No ratings yet
- Liquidity Management and Profitability: A Case Study of Listed Manufacturing Companies in Sri LankaDocument5 pagesLiquidity Management and Profitability: A Case Study of Listed Manufacturing Companies in Sri Lankaeditor_ijtel100% (1)
- Business Statistics A First Course - 6ed IndexDocument7 pagesBusiness Statistics A First Course - 6ed IndexPoorna Pushkala0% (2)
- Pengaruh Mekanisme Corporate Governance, Ukuran Perusahaan Dan Debt To Equity Ratio Terhadap Konservatisme AkuntansiDocument18 pagesPengaruh Mekanisme Corporate Governance, Ukuran Perusahaan Dan Debt To Equity Ratio Terhadap Konservatisme AkuntansiCaroel AkbarNo ratings yet
- Realestate Quiz Part1Document27 pagesRealestate Quiz Part1Shazeb LaluNo ratings yet
- Human Resource Management Practices and Service Delivery in County Government of Siaya KenyaDocument19 pagesHuman Resource Management Practices and Service Delivery in County Government of Siaya KenyaNasir Ali ShahNo ratings yet
- Case Studies in Construction Materials: Hikmat Daou, Walaa Abou Salha, Wassim Raphael, Alaa ChateauneufDocument12 pagesCase Studies in Construction Materials: Hikmat Daou, Walaa Abou Salha, Wassim Raphael, Alaa Chateauneufwubba lubba100% (1)
- Lecture - 3 - INDU 6221Document38 pagesLecture - 3 - INDU 6221Mumtarin HasnathNo ratings yet
- EkonometrikaDocument24 pagesEkonometrikaDedi SupriadiNo ratings yet
- MR BoostrapingDocument324 pagesMR BoostrapinghoangkhanhtdnNo ratings yet
- The Effect of Service Quality On Customer Satisfaction: A Case Study of Commercial Bank of Ethiopia Adama CityDocument15 pagesThe Effect of Service Quality On Customer Satisfaction: A Case Study of Commercial Bank of Ethiopia Adama CitykindhunNo ratings yet
- Impact of Information Systems On Innovation ProducDocument12 pagesImpact of Information Systems On Innovation ProducDriss MahboubiNo ratings yet
- Fibra Dietética Como Sustituto de Grasa en El Sistema Modelo de Carne Emulsionada y CocidaDocument7 pagesFibra Dietética Como Sustituto de Grasa en El Sistema Modelo de Carne Emulsionada y CocidaFlor B DelgadoNo ratings yet
- Financial Literacy Affects Financial Behavior Through Financial Attitude As An Intervening VariableDocument5 pagesFinancial Literacy Affects Financial Behavior Through Financial Attitude As An Intervening VariableInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Summer Internship Program Project Proposal: Name: Probal Sarkar Enrollment No.: 10BSPHH010896 Mobile No.: 8017494214Document4 pagesSummer Internship Program Project Proposal: Name: Probal Sarkar Enrollment No.: 10BSPHH010896 Mobile No.: 8017494214Probal Sarkar50% (2)
- Journal of Accounting, Business and ManagementDocument16 pagesJournal of Accounting, Business and ManagementWiduri PutriNo ratings yet
- RCsplinesDocument18 pagesRCsplinesrafael.sebastianNo ratings yet
- Philippine IndustrializationDocument22 pagesPhilippine IndustrializationRaziele Raneses50% (2)
- ©2016 Stat-Ease, Inc.: What's New in Design-Expert® Version 10Document24 pages©2016 Stat-Ease, Inc.: What's New in Design-Expert® Version 10Haresh PatelNo ratings yet
- The Impact of Exchange Rate Fluctuation PDFDocument9 pagesThe Impact of Exchange Rate Fluctuation PDFVee veeNo ratings yet
- Regression and Correlation NotesDocument6 pagesRegression and Correlation NotesJoseph ZotooNo ratings yet
- Regression Through The Origin (Importance of The Intercept)Document18 pagesRegression Through The Origin (Importance of The Intercept)SyaharaniNo ratings yet
- Chapter - 13 Correlation and Linear RegressionDocument32 pagesChapter - 13 Correlation and Linear Regressioncatherine wijayaNo ratings yet
- Keywords:-Corporate Income Tax, Profitability, LiquidityDocument12 pagesKeywords:-Corporate Income Tax, Profitability, LiquidityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- AutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsFrom EverandAutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsNo ratings yet
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Autodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)From EverandAutodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)No ratings yet
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Designing SCADA Application Software: A Practical ApproachFrom EverandDesigning SCADA Application Software: A Practical ApproachNo ratings yet