You might also like
- Vasistha's Yoga (Swami Venkatesananda)Document774 pagesVasistha's Yoga (Swami Venkatesananda)loquel95% (44)
- The VIM Book (Unknown Author)Document572 pagesThe VIM Book (Unknown Author)Moe B. Us100% (22)
- Narayana Upanishad PDFDocument9 pagesNarayana Upanishad PDFJeans Circuits80% (5)
- Clock GateDocument19 pagesClock Gateamma4manuNo ratings yet
- Clock Skew AnDocument13 pagesClock Skew AnNimmalapudi SureshNo ratings yet
- Enhanced Timing Closure Using LatchesDocument6 pagesEnhanced Timing Closure Using LatchesMelody ShieldsNo ratings yet
- Designing robust clock trees for complex SoCsDocument9 pagesDesigning robust clock trees for complex SoCsStudent100% (1)
- Low Power Design of Digital SystemsDocument28 pagesLow Power Design of Digital SystemssuperECENo ratings yet
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsFrom EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikNo ratings yet
- Most Asked INterview Questions For Physical DesignDocument2 pagesMost Asked INterview Questions For Physical DesignAvas RoyNo ratings yet
- Clock Issues in Deep Submircron DesignDocument50 pagesClock Issues in Deep Submircron Designshilpi lavaniaNo ratings yet
- Digital PLL Cicc Tutorial PerrottDocument118 pagesDigital PLL Cicc Tutorial PerrottSwethaVellankiNo ratings yet
- Clock GatingDocument12 pagesClock Gatingsandyk_24No ratings yet
- Clock GatingDocument12 pagesClock Gatingsandyk_24No ratings yet
- Microwave Engineering Pozar Chapter 05 Exercise 12Document11 pagesMicrowave Engineering Pozar Chapter 05 Exercise 12John Bofarull GuixNo ratings yet
- Yoga Kaivalyadham ModuleDocument71 pagesYoga Kaivalyadham Modulearunsrl100% (1)
- Aca Module 2Document35 pagesAca Module 2Shiva prasad100% (1)
- Testing High-Performance Pipelined Circuits With Slow-Speed TestersDocument16 pagesTesting High-Performance Pipelined Circuits With Slow-Speed Testersmingchiat88No ratings yet
- Latch OptDocument6 pagesLatch OptPavamana GiribhattanavarNo ratings yet
- Slack CalculationDocument14 pagesSlack CalculationThi NguyenNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument6 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- What Is Time Borrowing: Latches Exhibit The Property of Being Transparent When Clock IsDocument7 pagesWhat Is Time Borrowing: Latches Exhibit The Property of Being Transparent When Clock IsSiddarth BishtNo ratings yet
- Clock Skew Filtering and Minimizing Short Path ProblemsDocument8 pagesClock Skew Filtering and Minimizing Short Path ProblemshardeepNo ratings yet
- LOW POWER SEQUENTIAL CIRCUITS USING SYNCHRONOUS DERIVED CLOCKDocument7 pagesLOW POWER SEQUENTIAL CIRCUITS USING SYNCHRONOUS DERIVED CLOCKChaitanya ChavaNo ratings yet
- A New ADPLLDocument4 pagesA New ADPLLTruegodman FangNo ratings yet
- TCP Model For Short Lived Flows: Marco Mellia, Member, IEEE, Ion Stoica, Member, IEEE, and Hui Zhang, Member, IEEEDocument3 pagesTCP Model For Short Lived Flows: Marco Mellia, Member, IEEE, Ion Stoica, Member, IEEE, and Hui Zhang, Member, IEEEFernando MendozaNo ratings yet
- Re TimingDocument12 pagesRe TimingNikhil P GowdaNo ratings yet
- STA - Explanation of Clock Skew Concepts in VLSI - by ANKIT MAHAJAN - MediumDocument8 pagesSTA - Explanation of Clock Skew Concepts in VLSI - by ANKIT MAHAJAN - MediumRA NDYNo ratings yet
- Timing Yield Estimation Using STTADocument4 pagesTiming Yield Estimation Using STTARoshan UchilNo ratings yet
- 2011 - Howard's AlgorithmDocument6 pages2011 - Howard's AlgorithmRamona Elena PopaNo ratings yet
- SOC Implementation Wave-Pipelined: VenkataramaniDocument8 pagesSOC Implementation Wave-Pipelined: VenkataramaniRamesh PrasadNo ratings yet
- A Survey On Sequential Elements For Low Power Clocking SystemDocument10 pagesA Survey On Sequential Elements For Low Power Clocking SystemJournal of Computer ApplicationsNo ratings yet
- 21.Aging-Aware Reliable Multiplier Design With Adaptive Hold Logic JournalDocument7 pages21.Aging-Aware Reliable Multiplier Design With Adaptive Hold Logic JournalvlsitakeoffNo ratings yet
- Paper WVDDocument3 pagesPaper WVDNikhil SahuNo ratings yet
- The Optimum Pipeline Depth For A Microprocessor: A. Hartstein and Thomas R. PuzakDocument7 pagesThe Optimum Pipeline Depth For A Microprocessor: A. Hartstein and Thomas R. PuzakSiddharth SinghNo ratings yet
- chuan-kangliang2008Document9 pageschuan-kangliang2008Huy VươngNo ratings yet
- Timing Closure Using LatchesDocument3 pagesTiming Closure Using Latchesasic_masterNo ratings yet
- Microelectronics and Computer Systems Laboratory, Mcgill University 3480 University Street, Montreal, Quebec, Canada H3A 2A7Document10 pagesMicroelectronics and Computer Systems Laboratory, Mcgill University 3480 University Street, Montreal, Quebec, Canada H3A 2A7Ahmed AliNo ratings yet
- Low Power Clock Tree Synthesis Using Clustering AlgorithmDocument5 pagesLow Power Clock Tree Synthesis Using Clustering AlgorithmNavaneeth KumarNo ratings yet
- A 230ns Settling Time Type-I PLL With 0.96mW TDC Power and Simple T Calculation AlgorithmDocument4 pagesA 230ns Settling Time Type-I PLL With 0.96mW TDC Power and Simple T Calculation AlgorithmNguyen Van ToanNo ratings yet
- Working of C MOS (Single Edge Triggered)Document4 pagesWorking of C MOS (Single Edge Triggered)Avinash BaldiNo ratings yet
- Clock Tree Synthesis Under Aggressive Buffer Insertion: Ying-Yu Chen, Chen Dong, Deming ChenDocument4 pagesClock Tree Synthesis Under Aggressive Buffer Insertion: Ying-Yu Chen, Chen Dong, Deming ChenSudheer GangisettyNo ratings yet
- Power-Delay Efficient Overlap-Based Charge-Sharing Free Pseudo-Dynamic D Flip-FlopsDocument4 pagesPower-Delay Efficient Overlap-Based Charge-Sharing Free Pseudo-Dynamic D Flip-FlopsGopi PremalaNo ratings yet
- Voltage Drop Mitigation by Adaptive Voltage Scaling Using Clock-Data CompensationDocument4 pagesVoltage Drop Mitigation by Adaptive Voltage Scaling Using Clock-Data CompensationNguyen Van ToanNo ratings yet
- Lowering Power Consumption in Clock by Using Globally Asynchronous Locally Synchronous Design StyleDocument6 pagesLowering Power Consumption in Clock by Using Globally Asynchronous Locally Synchronous Design StyleSambhav VermanNo ratings yet
- PLLSimDocument6 pagesPLLSimShamp2No ratings yet
- Analysis and Synthesis of Synchronous CircuitsDocument11 pagesAnalysis and Synthesis of Synchronous CircuitsSandeep KaurNo ratings yet
- Traffic Capacity Analysis & Signal TimingDocument4 pagesTraffic Capacity Analysis & Signal TimingLastri PasaribuNo ratings yet
- Clock Distribution Networks in Processors and Clock Skew: Aayush Goel, 2010CS10201, IIT DelhiDocument4 pagesClock Distribution Networks in Processors and Clock Skew: Aayush Goel, 2010CS10201, IIT DelhiAayush GoelNo ratings yet
- Design of Clock Distribution Networks-Case StudyDocument3 pagesDesign of Clock Distribution Networks-Case StudyPino Watson PisoloNo ratings yet
- Time Borrowing and Time StealingDocument9 pagesTime Borrowing and Time StealingPradeep JagathratchaganNo ratings yet
- Computer Design Supervision 1Document8 pagesComputer Design Supervision 1Tom PattersonNo ratings yet
- Timer Wheel PDFDocument24 pagesTimer Wheel PDFSarah ColemanNo ratings yet
- Adaptive Pipeline Depth Control For Processor Power ManagementDocument4 pagesAdaptive Pipeline Depth Control For Processor Power ManagementPhuc HoangNo ratings yet
- An Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignDocument6 pagesAn Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignRaghul RamasamyNo ratings yet
- Analysis and Optimization of Sequential Circuit Elements To Combat Single-Event Timing UpsetsDocument4 pagesAnalysis and Optimization of Sequential Circuit Elements To Combat Single-Event Timing UpsetsIlango KaruppasamyNo ratings yet
- Asc 01161r0P80Document23 pagesAsc 01161r0P80goodshanmugamNo ratings yet
- Low Power Techniques For VLSI DesignDocument6 pagesLow Power Techniques For VLSI DesignjainatinNo ratings yet
- 14 Ref ImportDocument10 pages14 Ref Importsaira1qauNo ratings yet
- Methods For Electronic System Design and Verification Lab Report DAT110Document3 pagesMethods For Electronic System Design and Verification Lab Report DAT110HakimNo ratings yet
- Timer WheelDocument13 pagesTimer WheelSanjay KrishnanNo ratings yet
- Power-Aware Placement: Yongseok Cheon, Pei-Hsin Ho, Andrew B. Kahng, Sherief Reda, Qinke WangDocument6 pagesPower-Aware Placement: Yongseok Cheon, Pei-Hsin Ho, Andrew B. Kahng, Sherief Reda, Qinke WangNadella SreedharNo ratings yet
- Elastic Systems: Fig. 1. (A) Non-Elastic Behavior, (B) Elastic BehaviorDocument10 pagesElastic Systems: Fig. 1. (A) Non-Elastic Behavior, (B) Elastic BehaviorAna LavaNo ratings yet
- Clock Tree Synthesis and Optimization of Socs Under Low VoltageDocument5 pagesClock Tree Synthesis and Optimization of Socs Under Low VoltagemanojkumarNo ratings yet
- The Basic Calculation of Transmission Line ProtectionDocument9 pagesThe Basic Calculation of Transmission Line ProtectionManuel Henríquez SantanaNo ratings yet
- Evaluation of Different TCP Congestion Control Algorithms Using NS-2Document21 pagesEvaluation of Different TCP Congestion Control Algorithms Using NS-2anthony81212No ratings yet
- Pipe LiningDocument32 pagesPipe LiningveerendrasettyNo ratings yet
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- Serial Standards Quick Reference Guide: A Breadth of 40-nm High-Speed Transceiver SolutionsDocument2 pagesSerial Standards Quick Reference Guide: A Breadth of 40-nm High-Speed Transceiver SolutionsarunsrlNo ratings yet
- MargabandhuDocument322 pagesMargabandhuShivam S NaarayanNo ratings yet
- Verification Testbench: Nagesh Loke ARM CPU Verification Lead/ManagerDocument20 pagesVerification Testbench: Nagesh Loke ARM CPU Verification Lead/ManagerarunsrlNo ratings yet
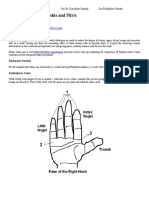
- Tarpana For Devas, Rishis and Pitris: Simplest ProcedureDocument2 pagesTarpana For Devas, Rishis and Pitris: Simplest ProcedureAnand AbheyNo ratings yet
- Verification Testbench: Nagesh Loke ARM CPU Verification Lead/ManagerDocument20 pagesVerification Testbench: Nagesh Loke ARM CPU Verification Lead/ManagerarunsrlNo ratings yet
- Power Aware CLK Tree PlanningDocument8 pagesPower Aware CLK Tree PlanningarunsrlNo ratings yet
- House Wiring Diagram of A Typical CircuitDocument5 pagesHouse Wiring Diagram of A Typical CircuitarunsrlNo ratings yet
- Verification Testbench: Nagesh Loke ARM CPU Verification Lead/ManagerDocument20 pagesVerification Testbench: Nagesh Loke ARM CPU Verification Lead/ManagerarunsrlNo ratings yet
- Output Constraints From FPGA Spec: Target Fpga Other DeviceDocument2 pagesOutput Constraints From FPGA Spec: Target Fpga Other DevicearunsrlNo ratings yet
- In-Datacenter Performance Analysis of A Tensor Processing UnitDocument17 pagesIn-Datacenter Performance Analysis of A Tensor Processing UnitarunsrlNo ratings yet
- Analyzing Clock Trees: Jeff ShabelDocument28 pagesAnalyzing Clock Trees: Jeff ShabelarunsrlNo ratings yet
- Indias RebirthDocument175 pagesIndias RebirthNalini100% (2)
- Clock Domain Crossing Design and ValidationDocument12 pagesClock Domain Crossing Design and Validationarunsrl100% (1)
- Standard Test Interface Language (STIL) A New Language For Patterns and WaveformsDocument6 pagesStandard Test Interface Language (STIL) A New Language For Patterns and WaveformsarunsrlNo ratings yet
- Parallel Computer Architecture A Hardware / Software ApproachDocument877 pagesParallel Computer Architecture A Hardware / Software ApproachTarek Jabre100% (1)
- Debugging Techniques for Mixed-Signal AMS SimulationsDocument28 pagesDebugging Techniques for Mixed-Signal AMS SimulationsarunsrlNo ratings yet
- Eye Diagram AnatomyDocument9 pagesEye Diagram AnatomyarunsrlNo ratings yet
- Stewart - Atkinson - Basic Analogue ComputerTechniques 1967Document117 pagesStewart - Atkinson - Basic Analogue ComputerTechniques 1967arunsrlNo ratings yet
- Why Are My CMOS Logic Ckts Burning UpDocument5 pagesWhy Are My CMOS Logic Ckts Burning UparunsrlNo ratings yet
- Parallel Computer Architecture A Hardware / Software ApproachDocument877 pagesParallel Computer Architecture A Hardware / Software ApproachTarek Jabre100% (1)
- Designware Non-Volatile MemoryDocument3 pagesDesignware Non-Volatile MemoryarunsrlNo ratings yet
- Appnote PCB FPGA Power Architectures 1Document2 pagesAppnote PCB FPGA Power Architectures 1arunsrlNo ratings yet
- 74LS373Document8 pages74LS373api-3697683No ratings yet
- Dlda May19 SolutionDocument23 pagesDlda May19 Solutionpanigrahysagar7No ratings yet
- Dual LFO oscillator manual and specsDocument1 pageDual LFO oscillator manual and specsinformagicNo ratings yet
- STP STP STP Stp4 4 4 44 4 4 407 07 07 07Document6 pagesSTP STP STP Stp4 4 4 44 4 4 407 07 07 07PandaCellNo ratings yet
- Clipping and Clamping Circuits PDFDocument3 pagesClipping and Clamping Circuits PDFKaustubh MallikNo ratings yet
- DAP024 / DAP024L Highly Integrated Green-Mode PWM ControllerDocument16 pagesDAP024 / DAP024L Highly Integrated Green-Mode PWM ControllerAugusto PereiraNo ratings yet
- ANALOG ELECTRONIC CIRCUITS IC BIASING & AMPLIFIERSDocument4 pagesANALOG ELECTRONIC CIRCUITS IC BIASING & AMPLIFIERSUttam NeelapureddyNo ratings yet
- CSC 209 Notes SplitDocument57 pagesCSC 209 Notes SplitBello TaiwoNo ratings yet
- NOT AND Nand OR NOR Ex-Or Ex-Nor: True FalseDocument8 pagesNOT AND Nand OR NOR Ex-Or Ex-Nor: True FalseAdeeb ArsadNo ratings yet
- Assignment 1Document6 pagesAssignment 1Kavinesh Ananthan100% (1)
- 74LS05Document6 pages74LS05Tammy WashingtonNo ratings yet
- Ka5S-Series: KA5S0765C/KA5S0965/KA5S12656/KA5S1265 Fairchild Power Switch (FPS)Document16 pagesKa5S-Series: KA5S0765C/KA5S0965/KA5S12656/KA5S1265 Fairchild Power Switch (FPS)Arte Y MecatrónicaNo ratings yet
- ECE465: Lecture #12 Digital Circuit Testing: Shantanu Dutt UICDocument21 pagesECE465: Lecture #12 Digital Circuit Testing: Shantanu Dutt UICRamanathanNo ratings yet
- A) Explain The Different Types of RAM and ROMDocument2 pagesA) Explain The Different Types of RAM and ROMawadii AwadiNo ratings yet
- T Con Boards - ZH-CN - enDocument51 pagesT Con Boards - ZH-CN - enALEXISNo ratings yet
- Vadodara Institute of Engineering: Basic Electronics (3110016) Experiment 8Document3 pagesVadodara Institute of Engineering: Basic Electronics (3110016) Experiment 8Hema JoshiNo ratings yet
- Lecture 13Document23 pagesLecture 13TeejayNo ratings yet
- M.Tech-VLSISD - R18 - SyllabusDocument57 pagesM.Tech-VLSISD - R18 - SyllabusPanku RangareeNo ratings yet
- LM748 Operational Amplifier Specifications and ApplicationsDocument7 pagesLM748 Operational Amplifier Specifications and ApplicationsjoelpalzaNo ratings yet
- 18ECC203J - Unit 3 Session 1 - 3Document55 pages18ECC203J - Unit 3 Session 1 - 3Ankur JhaNo ratings yet
- PIC16F870Document1 pagePIC16F870Diego VolpiniNo ratings yet
- 05 Behavioral VerilogDocument57 pages05 Behavioral Verilogjava beanNo ratings yet
- Vestel TV chassis issues troubleshooting guideDocument2 pagesVestel TV chassis issues troubleshooting guidevalidaeNo ratings yet
- High-Speed Digital Design Black MagicDocument89 pagesHigh-Speed Digital Design Black Magicapi-26444461No ratings yet
- AcknowledgementDocument6 pagesAcknowledgementMelvin Mathew VargheseNo ratings yet
- Datasheet NAND HCF 4011 B PDFDocument12 pagesDatasheet NAND HCF 4011 B PDFsed56No ratings yet
- Tiu 2 AunDocument5 pagesTiu 2 Aunjose teixeira100% (1)
- AN-607 Application Note: Selecting A Low Bandwidth ( 15 KSPS) Sigma-Delta ADCDocument2 pagesAN-607 Application Note: Selecting A Low Bandwidth ( 15 KSPS) Sigma-Delta ADCwsurferwNo ratings yet
- 4093 CircuitsDocument1 page4093 CircuitsKostas FoutrisNo ratings yet