You might also like
- 10ijss DraftDocument25 pages10ijss DraftSuresh PatilNo ratings yet
- VIsVAP Mei-Et-Al-2018-Simulation-Analysis-Of-Traffic-Signal-Control-And-Transit-Signal-Priority-Strategies-Under-ArterialDocument14 pagesVIsVAP Mei-Et-Al-2018-Simulation-Analysis-Of-Traffic-Signal-Control-And-Transit-Signal-Priority-Strategies-Under-ArterialDes AzharNo ratings yet
- Pressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular NetworksDocument10 pagesPressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular Networksnaumanhaider007No ratings yet
- A Deterministic and Stochastic Petri Net Model For Traffic-Responsive Signaling Control in Urban AreasDocument15 pagesA Deterministic and Stochastic Petri Net Model For Traffic-Responsive Signaling Control in Urban Areasnaumanhaider007No ratings yet
- An Approach For Condition Monitoring of Rolling Stock Sub-SystemsDocument12 pagesAn Approach For Condition Monitoring of Rolling Stock Sub-SystemsDamigo DiegoNo ratings yet
- A Hybrid Method For Automatic Traffic Control MechanismDocument7 pagesA Hybrid Method For Automatic Traffic Control MechanismiirNo ratings yet
- A Linear Time and Space Algorithm For Optimal Traffic-Signal Duration at An IntersectionDocument9 pagesA Linear Time and Space Algorithm For Optimal Traffic-Signal Duration at An Intersectionnaumanhaider007No ratings yet
- 190 460 1 PBDocument9 pages190 460 1 PBAndra LuisNo ratings yet
- Traffic SimultaionDocument12 pagesTraffic SimultaionYessyNo ratings yet
- Evolutionary techniques forecast Egypt's medium-term power loadDocument8 pagesEvolutionary techniques forecast Egypt's medium-term power loadMohamed SakrNo ratings yet
- Genetic Algorithm - Hill Climbing Optimization for Traffic SignalsDocument40 pagesGenetic Algorithm - Hill Climbing Optimization for Traffic Signalsفخرالدين محمد باقر فخرالدينNo ratings yet
- A Hybrid Method For Automatic Traffic Control MechanismDocument8 pagesA Hybrid Method For Automatic Traffic Control MechanismIntegrated Intelligent ResearchNo ratings yet
- Optimizing Signal Timing Control For Large Urban Traffic Networks Using An Adaptive Linear Quadratic Regulator Control StrategyDocument12 pagesOptimizing Signal Timing Control For Large Urban Traffic Networks Using An Adaptive Linear Quadratic Regulator Control StrategyAdriano MedeirosNo ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document11 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNo ratings yet
- A Traffic Light Control Method Based On Multi Agent Deep Reinforcement Learning AlgorithmDocument11 pagesA Traffic Light Control Method Based On Multi Agent Deep Reinforcement Learning Algorithmhanane eddahoumiNo ratings yet
- 1 s2.0 S0968090X22003680 MainDocument25 pages1 s2.0 S0968090X22003680 Mainwhiteyaksha24No ratings yet
- 190 911 1 PB PDFDocument9 pages190 911 1 PB PDFPutri CatolinNo ratings yet
- CIVE580 Mamalashvili Omari Research PaperDocument11 pagesCIVE580 Mamalashvili Omari Research PaperOmari MamalashviliNo ratings yet
- Multiple-Phase Train Trajectory Optimization With Signalling and Operational ConstraintsDocument21 pagesMultiple-Phase Train Trajectory Optimization With Signalling and Operational ConstraintsAryorespati Xavier SastrowardoyoNo ratings yet
- Continuum Adapative ControlDocument14 pagesContinuum Adapative Controlabdelhamid.ghoul93No ratings yet
- Bicego2020 Article NonlinearModelPredictiveContro PDFDocument35 pagesBicego2020 Article NonlinearModelPredictiveContro PDFEddylson Aguilar CasquinoNo ratings yet
- TLC Using VHDLDocument30 pagesTLC Using VHDLnaren_cool05No ratings yet
- A Dynamic Trajectory Planning MethodDocument17 pagesA Dynamic Trajectory Planning Methodgo.thanachotstNo ratings yet
- Integrated Comfort Adaptive Cruise and Semi Active Suspension Control For An Autonomous Vehicle An LPV Approach PDFDocument25 pagesIntegrated Comfort Adaptive Cruise and Semi Active Suspension Control For An Autonomous Vehicle An LPV Approach PDFThanh Phong PhamNo ratings yet
- A Two Stage Fuzzy Logic Adaptive Traffic Signal Control For An Isolated Intersection Based On Real Data Using SUMO SimulatorDocument4 pagesA Two Stage Fuzzy Logic Adaptive Traffic Signal Control For An Isolated Intersection Based On Real Data Using SUMO SimulatorEditor IJTSRDNo ratings yet
- Model of Cellular AutomataDocument5 pagesModel of Cellular AutomatafitriarohimaatikaNo ratings yet
- Automated Metro - Ensuring Safety and Reliability With Minimum Human InterventionDocument10 pagesAutomated Metro - Ensuring Safety and Reliability With Minimum Human InterventionpoketupiNo ratings yet
- Modelling and Analysis of Oversaturated Intersections Using Jointly Hybrid Petri Net and Hybrid AutomataDocument13 pagesModelling and Analysis of Oversaturated Intersections Using Jointly Hybrid Petri Net and Hybrid Automatanaumanhaider007No ratings yet
- Multiplexed Model Predictive Control Solves Optimization Problems SequentiallyDocument31 pagesMultiplexed Model Predictive Control Solves Optimization Problems SequentiallyLuís FelipeNo ratings yet
- Neural Networks For Continuous Online Learning and ControlDocument21 pagesNeural Networks For Continuous Online Learning and ControlHamilton AnguetaNo ratings yet
- Robust Model Predictive Control ThesisDocument4 pagesRobust Model Predictive Control Thesisafhbgohob100% (2)
- Trajectory Planning1Document20 pagesTrajectory Planning1Ola SkeikNo ratings yet
- Iet-Cta 2021 BtsDocument13 pagesIet-Cta 2021 BtsNguyễn Đăng HưngNo ratings yet
- Its Application in Traffic and Transportation ManagementDocument9 pagesIts Application in Traffic and Transportation ManagementStark ArpitNo ratings yet
- Fast Flow Control Algorithm for Real-Time Emergency EvacuationDocument9 pagesFast Flow Control Algorithm for Real-Time Emergency EvacuationMusliminNo ratings yet
- Revue D'intelligence Artificielle: Received: 9 September 2021 Accepted: 15 October 2021Document8 pagesRevue D'intelligence Artificielle: Received: 9 September 2021 Accepted: 15 October 2021Abdelaali BakhoucheNo ratings yet
- TMC1 TrafficSignalControlDocument93 pagesTMC1 TrafficSignalControlpronab kumarNo ratings yet
- Nonstationary Control For TS Fuzzy Markovian Switching Systems With Variable Quantization DensityDocument11 pagesNonstationary Control For TS Fuzzy Markovian Switching Systems With Variable Quantization Densitycscscs.789456No ratings yet
- Dersin 2012 - IEEEDocument12 pagesDersin 2012 - IEEEOsvaldo M S NetoNo ratings yet
- International Journal of Engineering and Science Invention (IJESI)Document7 pagesInternational Journal of Engineering and Science Invention (IJESI)inventionjournalsNo ratings yet
- Sensors 20 00508 PDFDocument18 pagesSensors 20 00508 PDFRayan TiwariNo ratings yet
- Univariate and Multivariate Control Charts For Monitoring Dynamic-Behavior Processes: A Case StudyDocument35 pagesUnivariate and Multivariate Control Charts For Monitoring Dynamic-Behavior Processes: A Case StudyNugraha PutraNo ratings yet
- A Modified Reinforcement Learning Algorithm For Solving Coordinated Signalized NetworksDocument16 pagesA Modified Reinforcement Learning Algorithm For Solving Coordinated Signalized NetworksAnıl Akçakaya100% (1)
- Fuzzy Project FinalDocument32 pagesFuzzy Project FinalAhmed RazaNo ratings yet
- 42 Firb (EWGT2006)Document15 pages42 Firb (EWGT2006)guido gentileNo ratings yet
- Robust MPC for Discrete-Time MJLSs With Operation Mode DisorderingDocument13 pagesRobust MPC for Discrete-Time MJLSs With Operation Mode DisorderingnhatvpNo ratings yet
- Literature Review of Traffic Light ControllerDocument4 pagesLiterature Review of Traffic Light Controllerafdtbluwq100% (1)
- Effects of Signal Retiming on SafetyDocument9 pagesEffects of Signal Retiming on SafetyJdulia ClaireNo ratings yet
- Emergency Vehicle Priority System Using VANETDocument6 pagesEmergency Vehicle Priority System Using VANETVorya HosseniNo ratings yet
- 9 - Artigo A Predictive Controller For Autonomous Vehicle Path Tracking - RaffoDocument11 pages9 - Artigo A Predictive Controller For Autonomous Vehicle Path Tracking - RaffoRafael Monteiro SouzaNo ratings yet
- Multi ARLDocument10 pagesMulti ARLhanane eddahoumiNo ratings yet
- Prediction of Critical Clearing Time Using Artificial Neural NetworkDocument5 pagesPrediction of Critical Clearing Time Using Artificial Neural NetworkSaddam HussainNo ratings yet
- بحث2 PDFDocument5 pagesبحث2 PDFď èNo ratings yet
- Short Circuit Fault Classification and LDocument13 pagesShort Circuit Fault Classification and Lዛላው መናNo ratings yet
- Optimal Control of A Teleoperation System Via LMI - Based Robust PID ControllersDocument10 pagesOptimal Control of A Teleoperation System Via LMI - Based Robust PID ControllersidescitationNo ratings yet
- Integrated Longitudinal and Lateral Networked ContDocument25 pagesIntegrated Longitudinal and Lateral Networked ContJasNo ratings yet
- This Paper Has Been Mechanically Scanned. Some Errors May Have Been Inadvertently IntroducedDocument12 pagesThis Paper Has Been Mechanically Scanned. Some Errors May Have Been Inadvertently IntroducedOso OsoNo ratings yet
- Evaluation of Adaptive and Fixed Time Traffic Signal Strategies: Case Study of SkopjeDocument10 pagesEvaluation of Adaptive and Fixed Time Traffic Signal Strategies: Case Study of SkopjeDaniel GhitaNo ratings yet
- Simulation of Intelligent Traffic Control For Autonomous VehiclesDocument7 pagesSimulation of Intelligent Traffic Control For Autonomous Vehiclessivaharish.sc.2017.mechNo ratings yet
- Research Article: Control Strategy of Signal Transition After Emergency Vehicle Signal PreemptionDocument11 pagesResearch Article: Control Strategy of Signal Transition After Emergency Vehicle Signal PreemptionshazNo ratings yet
- FPR It332Document1 pageFPR It332shazNo ratings yet
- A Proposed Model For Traffic Signal Preemption Using Global Positioning System (GPS)Document8 pagesA Proposed Model For Traffic Signal Preemption Using Global Positioning System (GPS)CS & ITNo ratings yet
- ReadmeDocument7 pagesReadmeshazNo ratings yet
- Ijarcce5d PDFDocument3 pagesIjarcce5d PDFElamurugan PeriyasamyNo ratings yet
- Advanced Traffic Signal Control System For Emergency VehiclesDocument5 pagesAdvanced Traffic Signal Control System For Emergency VehiclesshazNo ratings yet
- A GPS Based Traffic Light Pre-Emption Control System For Emergency VehiclesDocument7 pagesA GPS Based Traffic Light Pre-Emption Control System For Emergency VehiclesshazNo ratings yet
- Emergency Vehicle Sensing Traffic Signals Using Android and Cloud ComputingDocument6 pagesEmergency Vehicle Sensing Traffic Signals Using Android and Cloud ComputingshazNo ratings yet
- Google Cloud Storage - A Simple Way To Store, Protect, and Share DataDocument2 pagesGoogle Cloud Storage - A Simple Way To Store, Protect, and Share DatafastchennaiNo ratings yet
- IOT Based Traffic Signal Control For Reducing TimeDocument3 pagesIOT Based Traffic Signal Control For Reducing TimeshazNo ratings yet
- Ijert Ijert: Traffic Light Priority Control For Emergency VehicleDocument3 pagesIjert Ijert: Traffic Light Priority Control For Emergency VehicleshazNo ratings yet
- An Efficient Monitoring of Real Time Traffic Clearance For An Emergency Service Vehicle Using IOTDocument28 pagesAn Efficient Monitoring of Real Time Traffic Clearance For An Emergency Service Vehicle Using IOTshazNo ratings yet
- A Mobile Application of A Geo-Map Informatics Blast For Emergency ResponseDocument8 pagesA Mobile Application of A Geo-Map Informatics Blast For Emergency ResponseshazNo ratings yet
- Automatic Traffic Signals in Smart CitiesDocument6 pagesAutomatic Traffic Signals in Smart CitiesshazNo ratings yet
- Mobile Scaffold Inspection ChecklistDocument3 pagesMobile Scaffold Inspection Checklistanthony murphyNo ratings yet
- Tesco AnalysisDocument12 pagesTesco Analysisdanny_wch7990No ratings yet
- Chapter 4 Duality and Post Optimal AnalysisDocument37 pagesChapter 4 Duality and Post Optimal AnalysisMir Md Mofachel HossainNo ratings yet
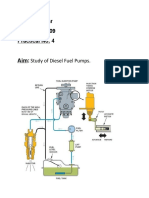
- Study of Diesel Fuel Pumps ComponentsDocument6 pagesStudy of Diesel Fuel Pumps ComponentsPro GamerssNo ratings yet
- Harvard Algorithms cs124 NotesDocument6 pagesHarvard Algorithms cs124 NotesYamini DasguptaNo ratings yet
- Modern Control Systems Linear Approximation Laplace TransformDocument3 pagesModern Control Systems Linear Approximation Laplace TransformramNo ratings yet
- Solutions Manual For Introduction To Management Accounting 16Th Edition Horngren Sundem Schatzberg Burgstahler 0133058786 9780133058789 Full Chapter PDFDocument36 pagesSolutions Manual For Introduction To Management Accounting 16Th Edition Horngren Sundem Schatzberg Burgstahler 0133058786 9780133058789 Full Chapter PDFdavid.rex111100% (10)
- Business Plan ForbesDocument4 pagesBusiness Plan ForbesMoiz AhmedNo ratings yet
- Intelligent Platform Management Bus Communications Protocol Specification v1.0Document43 pagesIntelligent Platform Management Bus Communications Protocol Specification v1.0alexchuahNo ratings yet
- Violence ADocument236 pagesViolence AEndry AbidinNo ratings yet
- Dasar Ubat Nasional 2012Document74 pagesDasar Ubat Nasional 2012reymee21No ratings yet
- Project Report ON: "Brand Preference of Onida Colour TV in Coastal OrissaDocument66 pagesProject Report ON: "Brand Preference of Onida Colour TV in Coastal OrissaApurba KhanduriNo ratings yet
- Dynamic Arc Recognition and TerminationDocument12 pagesDynamic Arc Recognition and TerminationArun BabuNo ratings yet
- Excel calendarDocument28 pagesExcel calendarThanh LêNo ratings yet
- Ha16 18PXDocument2 pagesHa16 18PXStefce PetrovNo ratings yet
- Multiculturalism Pros and ConsDocument2 pagesMulticulturalism Pros and ConsInês CastanheiraNo ratings yet
- Electrical design for proposed residential buildingDocument24 pagesElectrical design for proposed residential buildingMALABIKA MONDALNo ratings yet
- Crafted Furniture Business PlanDocument30 pagesCrafted Furniture Business PlanSufianNo ratings yet
- Optical Burst Switching (OBS)Document27 pagesOptical Burst Switching (OBS)adityaNo ratings yet
- Automotive Transmission-ShaftDocument7 pagesAutomotive Transmission-Shaftfileuse.fNo ratings yet
- Citroen C4 Picasso/Grand Picasso BilmetropolenDocument5 pagesCitroen C4 Picasso/Grand Picasso BilmetropolenAlberto Miglino100% (1)
- 10 - A TFT-LCD Source-Driver IC With Charge-Recycling TechniqueDocument11 pages10 - A TFT-LCD Source-Driver IC With Charge-Recycling Techniquematwan29No ratings yet
- CRM Vendors, Vendor SelectionDocument7 pagesCRM Vendors, Vendor SelectionsanamkmNo ratings yet
- ACR - Grolier Turn Over of Online ResourcesDocument4 pagesACR - Grolier Turn Over of Online ResourcesIreneo Aposacas Jr.No ratings yet
- University of The Cordilleras Process CostingDocument5 pagesUniversity of The Cordilleras Process CostingJane PadillaNo ratings yet
- Bill To / Ship To:: Qty Gross Amount Discount Other Charges Taxable Amount CGST SGST/ Ugst Igst Cess Total AmountDocument1 pageBill To / Ship To:: Qty Gross Amount Discount Other Charges Taxable Amount CGST SGST/ Ugst Igst Cess Total AmountAnkit SinghNo ratings yet
- Cortes Constitutional Foundations of Privacy in Emerging Trends in LawDocument3 pagesCortes Constitutional Foundations of Privacy in Emerging Trends in LawAce Reblora IINo ratings yet
- Hotel Reservation System: Hotel OAK-RAY, KandyDocument22 pagesHotel Reservation System: Hotel OAK-RAY, KandysaminaNo ratings yet
- UI UX Research DesignDocument7 pagesUI UX Research DesignSomya ShrivastavaNo ratings yet
- Motor Vehicles and Road Traffic Regulation 48.50Document411 pagesMotor Vehicles and Road Traffic Regulation 48.50Clayton AllenNo ratings yet