You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Setting Calculation P443Document27 pagesSetting Calculation P443Noptana Tummasit75% (4)
- Setting Calculation P443Document27 pagesSetting Calculation P443Noptana Tummasit75% (4)
- Setting Calculation 7SD522Document19 pagesSetting Calculation 7SD522Noptana TummasitNo ratings yet
- DIGSI4 Process Data AnalysisDocument27 pagesDIGSI4 Process Data Analysismohammed youisfNo ratings yet
- 06 - Disturbance Recording and Handling PDFDocument62 pages06 - Disturbance Recording and Handling PDFAnonymous fM2c6BNo ratings yet
- ZenonDocument221 pagesZenonRobertoNo ratings yet
- Introduction To Atp - May 16 2011v8Document110 pagesIntroduction To Atp - May 16 2011v8karlTronxoNo ratings yet
- Relay - Setting - P443 REV.3Document29 pagesRelay - Setting - P443 REV.3Noptana Tummasit100% (2)
- The Effect of Inrush Current On Transformer ProtectionDocument9 pagesThe Effect of Inrush Current On Transformer Protectionbigsteve9088No ratings yet
- Comtrade Format Recording Data Display - Programmer SoughtDocument17 pagesComtrade Format Recording Data Display - Programmer SoughtaaaaNo ratings yet
- Inter Trip Ki Surin 14july2022 r1 ModelDocument1 pageInter Trip Ki Surin 14july2022 r1 ModelNoptana TummasitNo ratings yet
- Ikss:A 1.250 Ka Ikss:B 0.000 Ka Ikss:C 0.000 Ka R0 10.469 Ohm X0 67.470 Ohm Z0 68.277 Ohm R1 12.013 Ohm X1 44.029 Ohm Z1 45.638 OhmDocument1 pageIkss:A 1.250 Ka Ikss:B 0.000 Ka Ikss:C 0.000 Ka R0 10.469 Ohm X0 67.470 Ohm Z0 68.277 Ohm R1 12.013 Ohm X1 44.029 Ohm Z1 45.638 OhmNoptana TummasitNo ratings yet
- Skss 289.8 MVA Ikss 1.455 Ka Ip 2.988 KaDocument1 pageSkss 289.8 MVA Ikss 1.455 Ka Ip 2.988 KaNoptana TummasitNo ratings yet
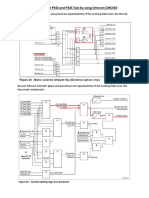
- Evolving Fault P543 and P443 Test by Using Omicron CMC356Document3 pagesEvolving Fault P543 and P443 Test by Using Omicron CMC356Noptana TummasitNo ratings yet
- Evolving Fault P543 and P443 Test by Using Omicron CMC356Document3 pagesEvolving Fault P543 and P443 Test by Using Omicron CMC356Noptana TummasitNo ratings yet
- Settings SGADocument12 pagesSettings SGANoptana TummasitNo ratings yet
- Settings LNBDocument18 pagesSettings LNBNoptana TummasitNo ratings yet
- Settings LNCDocument24 pagesSettings LNCNoptana TummasitNo ratings yet
- Settings PASDocument12 pagesSettings PASNoptana TummasitNo ratings yet
- Siemens 87L - Compatibility ModeDocument46 pagesSiemens 87L - Compatibility ModeNoptana TummasitNo ratings yet
- Mipower Ver 10 01Document4 pagesMipower Ver 10 01Nokhwrang BrahmaNo ratings yet
- Technical Guide No 7Document20 pagesTechnical Guide No 7peloduro1010No ratings yet
- Micom P40 Agile: Ge Grid SolutionsDocument21 pagesMicom P40 Agile: Ge Grid Solutionssirovic90No ratings yet
- Wavewin Sniffer Training ClassDocument2 pagesWavewin Sniffer Training ClassBra BicabaNo ratings yet
- ATP PlotDocument7 pagesATP PlotFelipe Mafioletti SchuartzNo ratings yet
- Bro IbaAnalyzePostprocess v1.5 enDocument24 pagesBro IbaAnalyzePostprocess v1.5 enshahidmb9431No ratings yet
- Basler DECS-400 Instruction ManualDocument227 pagesBasler DECS-400 Instruction ManualTurnerNo ratings yet
- Final Report Wg-3Document60 pagesFinal Report Wg-3Akshaya kumar mohantyNo ratings yet
- 01 - MiCOM General & Px2xDocument43 pages01 - MiCOM General & Px2xahmedNo ratings yet
- Technical Requirements For Power Generating Plants Connected To MV and HV GridDocument119 pagesTechnical Requirements For Power Generating Plants Connected To MV and HV GridAlejandro Solis GomezNo ratings yet
- Sepam Range Presentation - 2013Document40 pagesSepam Range Presentation - 2013Nasser Abdel RaoufNo ratings yet
- ibaAnalyzer-DAT-Extractor v1.0 enDocument35 pagesibaAnalyzer-DAT-Extractor v1.0 enJuan CarlosNo ratings yet
- Transformer Protection RET650: Product GuideDocument80 pagesTransformer Protection RET650: Product GuideShahir IbrahimiNo ratings yet
- Using COMTRADE Files For Relay Testing PDFDocument1 pageUsing COMTRADE Files For Relay Testing PDFtrankus01No ratings yet
- Generic IEC61850 IED ConnPack ReleaseNotes - v2 - 4 - 3Document7 pagesGeneric IEC61850 IED ConnPack ReleaseNotes - v2 - 4 - 3Hoàng Thái HưngNo ratings yet
- Test Universe AppNote TransView Fault Location 2010 ENUDocument11 pagesTest Universe AppNote TransView Fault Location 2010 ENUPanu Mark IINo ratings yet
- SICAM Q100 - DescriptionDocument14 pagesSICAM Q100 - DescriptionsparkCENo ratings yet
- 1MRK511191-BEN A en BuyerAs Guide Bay Control IED REC 670 Customized 1.1Document54 pages1MRK511191-BEN A en BuyerAs Guide Bay Control IED REC 670 Customized 1.1joakim_ÖgrenNo ratings yet
- Atp ComtradeDocument8 pagesAtp ComtradeJorge VascoNo ratings yet
- Ultra-Portable Protection Test Set and CalibratorDocument16 pagesUltra-Portable Protection Test Set and CalibratorAsdera CodigoNo ratings yet
- Event Reports - SEL 5601Document40 pagesEvent Reports - SEL 5601Jed Tedor100% (3)
- Fromato de Archivos ComtradeDocument4 pagesFromato de Archivos ComtrademarcospowerNo ratings yet
- Lecture 22 Small Signal StabilityDocument24 pagesLecture 22 Small Signal StabilityManuelNo ratings yet
- Advanced - Protection OMICRONDocument210 pagesAdvanced - Protection OMICRONJorge TorresNo ratings yet