You might also like
- Liquid Sensing Using Active Feedback Assisted Planar Microwave ResonatorDocument3 pagesLiquid Sensing Using Active Feedback Assisted Planar Microwave ResonatorhesoyamyecgaaaNo ratings yet
- Saket Udar 18BEC0760: Definition: Measuring Devices Temperature, Displacement, Vibration EtcDocument6 pagesSaket Udar 18BEC0760: Definition: Measuring Devices Temperature, Displacement, Vibration EtcAlexzander PatelNo ratings yet
- Void Fraction AmitDocument10 pagesVoid Fraction AmitAnonymous 5AmJ13mLkNo ratings yet
- Monitoring Solid Particle Deposition in Lossy Medium Using Planar Resonator SensorDocument9 pagesMonitoring Solid Particle Deposition in Lossy Medium Using Planar Resonator SensorhesoyamyecgaaaNo ratings yet
- Current Sensors Using Magnetic MaterialsDocument7 pagesCurrent Sensors Using Magnetic MaterialsSuttisak SuriyachanhomNo ratings yet
- Frequency Detection in Vortex Flowmeter For Low Reynolds Number Using Piezoelectric Sensor and Installation EffectsDocument9 pagesFrequency Detection in Vortex Flowmeter For Low Reynolds Number Using Piezoelectric Sensor and Installation EffectsBurak YalımNo ratings yet
- Conductivity Effect On The Capacitance Measurement of A Parallel-Plate Capacitive Sensor SystemDocument8 pagesConductivity Effect On The Capacitance Measurement of A Parallel-Plate Capacitive Sensor SystemKrisna SinghNo ratings yet
- Samant 2021Document8 pagesSamant 2021Miguel Angel Cama IriarteNo ratings yet
- LPR Monitoring Provides Instant Corrosion Rate FeedbackDocument2 pagesLPR Monitoring Provides Instant Corrosion Rate FeedbackLilibeth María Cañas MercadoNo ratings yet
- Pressure sensorDocument9 pagesPressure sensorduong nguyenNo ratings yet
- Sensors: Frequency-Switchable Metamaterial Absorber Injecting Eutectic Gallium-Indium (Egain) Liquid Metal AlloyDocument12 pagesSensors: Frequency-Switchable Metamaterial Absorber Injecting Eutectic Gallium-Indium (Egain) Liquid Metal AlloySiscaDinaNo ratings yet
- Electrochimica ActaDocument8 pagesElectrochimica Acta18015 Asfia RifaNo ratings yet
- Sensor de Conductividad en Calidad Del AguaDocument7 pagesSensor de Conductividad en Calidad Del AguaCesar BuitragoNo ratings yet
- Wireless Communication in Feedback-Assisted Active SensorsDocument7 pagesWireless Communication in Feedback-Assisted Active SensorshesoyamyecgaaaNo ratings yet
- i Ccs Se Beijing PaperDocument5 pagesi Ccs Se Beijing PaperAfri YudamsonNo ratings yet
- Carrat 2019Document11 pagesCarrat 2019pallav sahuNo ratings yet
- A Novel Power Stability Drive System of SemiconducDocument11 pagesA Novel Power Stability Drive System of SemiconducThya efeNo ratings yet
- Fabrication, Characterization and Electrochemical Simulation of Aln Gate Isfet PH SensorDocument12 pagesFabrication, Characterization and Electrochemical Simulation of Aln Gate Isfet PH SensorOussama ZeggaiNo ratings yet
- Silicon Photonics Biosensing - 2019 - Bulk Sensing and SurfaceDocument12 pagesSilicon Photonics Biosensing - 2019 - Bulk Sensing and SurfaceLucas EduardoNo ratings yet
- Interdigitated Electrode Sensors: Design, Efficiency and ApplicationsDocument62 pagesInterdigitated Electrode Sensors: Design, Efficiency and ApplicationsAshutosh PandeyNo ratings yet
- A Flexible Ionic Liquid-Polyurethane Sponge Capacitive Pressure Sensor - Yang Et Al. - 2019-AnnotatedDocument6 pagesA Flexible Ionic Liquid-Polyurethane Sponge Capacitive Pressure Sensor - Yang Et Al. - 2019-AnnotatedGaurav RawalNo ratings yet
- Ultrasonic Water Level Indicator and Identification Using AVR MicrocontrollerDocument22 pagesUltrasonic Water Level Indicator and Identification Using AVR MicrocontrollerAjmal AjuNo ratings yet
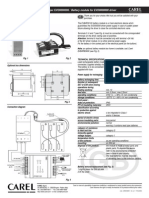
- Ti12d07g03 00en PDocument21 pagesTi12d07g03 00en PMay Rodyn Cuba de la CruzNo ratings yet
- Ultrasonic Water Level Indicator and Controller Using AvrDocument22 pagesUltrasonic Water Level Indicator and Controller Using AvrAjmal Aju100% (1)
- Low-Cost Multi Electrode Resistivity Meter Based oDocument7 pagesLow-Cost Multi Electrode Resistivity Meter Based ojaimemanNo ratings yet
- Hardwarex: Rémi Clement, Yannick Fargier, Vivien Dubois, Julien Gance, Emile Gros, Nicolas ForquetDocument23 pagesHardwarex: Rémi Clement, Yannick Fargier, Vivien Dubois, Julien Gance, Emile Gros, Nicolas ForquetjaimemanNo ratings yet
- Biosensors and Bioelectronics: N.Y. Kim, R. Dhakal, K.K. Adhikari, E.S. Kim, C. WangDocument7 pagesBiosensors and Bioelectronics: N.Y. Kim, R. Dhakal, K.K. Adhikari, E.S. Kim, C. Wangkishor adhikariNo ratings yet
- Separations 03 00002 v3Document12 pagesSeparations 03 00002 v3Csaba AndrásNo ratings yet
- Types of RunoutDocument7 pagesTypes of RunoutMaurizio SciancaleporeNo ratings yet
- Double Sided Drift Method Reduces The Effect of Crystals' Inhomogeneity To Si (Li) Detector's ElectroPysicsal CharacteristicsDocument4 pagesDouble Sided Drift Method Reduces The Effect of Crystals' Inhomogeneity To Si (Li) Detector's ElectroPysicsal CharacteristicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Eddycurrentsensor PCB SENSOR 2010Document8 pagesEddycurrentsensor PCB SENSOR 2010Siphesihle NkosiNo ratings yet
- Energy Dissipation in Microfluidic Beam ResonatorsDocument15 pagesEnergy Dissipation in Microfluidic Beam ResonatorsRama KrishnaNo ratings yet
- Determine Sugar Content Using Capacitor SensorDocument7 pagesDetermine Sugar Content Using Capacitor Sensortheppanom kongpramoolNo ratings yet
- J Optlastec 2016 02 015Document6 pagesJ Optlastec 2016 02 015EDO SUNARDINo ratings yet
- Measurement of Dielectric Material PropertiesDocument36 pagesMeasurement of Dielectric Material PropertiesPho Duc NamNo ratings yet
- Current Sensors Using Magnetic Materials: Invited PaperDocument6 pagesCurrent Sensors Using Magnetic Materials: Invited PaperQuan LinhNo ratings yet
- Features of Calibration of Precision LCR Meters: December 2019Document8 pagesFeatures of Calibration of Precision LCR Meters: December 2019pankrasius herbudiNo ratings yet
- Fishing With MultiphysicsDocument3 pagesFishing With MultiphysicsRaj KumarNo ratings yet
- Sensors 15 24318Document25 pagesSensors 15 24318skalanidhiNo ratings yet
- Nuclear Engineering and Technology: Jeong Ho Kim, Ki Hyun Park, Koan Sik JooDocument5 pagesNuclear Engineering and Technology: Jeong Ho Kim, Ki Hyun Park, Koan Sik JooGabriela MirandaNo ratings yet
- Python GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Document6 pagesPython GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Tomás de AlmeidaNo ratings yet
- Question Bank - Unit VDocument5 pagesQuestion Bank - Unit Vjames RNo ratings yet
- Microstrip Inductor Design and ImplementationDocument5 pagesMicrostrip Inductor Design and Implementationp.mallikarjunaNo ratings yet
- Structural Design For Microaccelerometer: SciencedirectDocument12 pagesStructural Design For Microaccelerometer: SciencedirectsachinNo ratings yet
- A Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2Document8 pagesA Novel Technique For Optical Fiber PH Sensing Based On Methylene Blue Adsorption-2liton_kabirNo ratings yet
- Sensors: Development of Miniaturized Water Quality Monitoring System Using Wireless CommunicationDocument14 pagesSensors: Development of Miniaturized Water Quality Monitoring System Using Wireless CommunicationHat HackersNo ratings yet
- Kato Et Al., 2017Document8 pagesKato Et Al., 2017ANA MARIA VILLA OSORIONo ratings yet
- Intro to Biomedical Engineering TransducersDocument37 pagesIntro to Biomedical Engineering TransducersZhafir Naufal0% (1)
- Constant Phase ElementDocument7 pagesConstant Phase Elementlok171962No ratings yet
- Level - 3: Department: Instrumentation and Controls DesignDocument15 pagesLevel - 3: Department: Instrumentation and Controls DesignSathish KumarNo ratings yet
- A Novel Ferrofluids Based Hign Tuning Solenoid 07394059Document4 pagesA Novel Ferrofluids Based Hign Tuning Solenoid 07394059RafaelflegmaNo ratings yet
- Analysis of Electrical Resonance Distortion For inDocument8 pagesAnalysis of Electrical Resonance Distortion For inخالدمحمدNo ratings yet
- Performance Study of Optical ModulatorDocument10 pagesPerformance Study of Optical ModulatorAbu SalmanNo ratings yet
- Galvanic Cell 4Document7 pagesGalvanic Cell 4Khang Ni 康妮 FooNo ratings yet
- Design and Demodulation Stability Analysis of Cascaded Photonic CrystalDocument7 pagesDesign and Demodulation Stability Analysis of Cascaded Photonic Crystalren hongliangNo ratings yet
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- Review DC CurrentDocument6 pagesReview DC Currentrajagopal gNo ratings yet
- Cascade PDFDocument13 pagesCascade PDFhewitt isaacNo ratings yet
- RPC21-Outdoor Field Experience With Autonomous RPC Based StationsDocument11 pagesRPC21-Outdoor Field Experience With Autonomous RPC Based StationsAndré MoraisNo ratings yet
- Recovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationDocument4 pagesRecovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationYesid Tapiero MartínezNo ratings yet
- Seplite MC295Document2 pagesSeplite MC295Yesid Tapiero MartínezNo ratings yet
- Seplite LSC 106plus: Seplite For Removal of Nitrate From Water and Other SolutionsDocument2 pagesSeplite LSC 106plus: Seplite For Removal of Nitrate From Water and Other SolutionsYesid Tapiero MartínezNo ratings yet
- Recovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationDocument4 pagesRecovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationYesid Tapiero MartínezNo ratings yet
- Electrolytes ReviewDocument20 pagesElectrolytes ReviewLỢI NGUYỄN CÔNGNo ratings yet
- Recovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationDocument4 pagesRecovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationYesid Tapiero MartínezNo ratings yet
- Determination of Alkalinity by Titration Short MethodDocument4 pagesDetermination of Alkalinity by Titration Short MethodSatyabrat GaanNo ratings yet
- Al-Khafaji 2019 IOP Conf. Ser. Mater. Sci. Eng. 518 062007Document12 pagesAl-Khafaji 2019 IOP Conf. Ser. Mater. Sci. Eng. 518 062007Yesid Tapiero MartínezNo ratings yet
- Recovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationDocument4 pagesRecovery of Water From Concentration of Copper Mining Effluents Using Direct Contact Membrane DistillationYesid Tapiero MartínezNo ratings yet
- Conversion Expressions For Electrochemical Reactors Which Operate Under Mass Transport Controlled Reaction Conditions, Part II Batch Recycle, Casacade and Recycle Loop ReactorsDocument12 pagesConversion Expressions For Electrochemical Reactors Which Operate Under Mass Transport Controlled Reaction Conditions, Part II Batch Recycle, Casacade and Recycle Loop ReactorsYesid Tapiero MartínezNo ratings yet
- Treatment of Saline Aqueous Solutions Using Direct Contact Membrane DistillationDocument9 pagesTreatment of Saline Aqueous Solutions Using Direct Contact Membrane DistillationYesid Tapiero MartínezNo ratings yet
- Turbidity IntroductionDocument2 pagesTurbidity IntroductionYesid Tapiero MartínezNo ratings yet
- Response Surface Modeling and Optimization of Direct Contact Membrane Distillation For Water DesalinationDocument15 pagesResponse Surface Modeling and Optimization of Direct Contact Membrane Distillation For Water DesalinationYesid Tapiero MartínezNo ratings yet
- Fluid Phase EquilibriaDocument11 pagesFluid Phase EquilibriaYesid Tapiero MartínezNo ratings yet
- Heat Exchangers UsingDocument13 pagesHeat Exchangers UsingYesid Tapiero MartínezNo ratings yet
- Process For Producing 1 4 Butanediol andDocument5 pagesProcess For Producing 1 4 Butanediol andYesid Tapiero MartínezNo ratings yet
- Multipasos Heat ExchangersDocument8 pagesMultipasos Heat ExchangersYesid Tapiero MartínezNo ratings yet
- Modeling Viscosity of Concentrated and Mixed Solvent Electrolyte SystemsDocument12 pagesModeling Viscosity of Concentrated and Mixed Solvent Electrolyte SystemsYesid Tapiero MartínezNo ratings yet
- Desalination: Aamer Ali, Cejna Anna Quist-Jensen, Enrico Drioli, Francesca MacedonioDocument8 pagesDesalination: Aamer Ali, Cejna Anna Quist-Jensen, Enrico Drioli, Francesca MacedonioYesid Tapiero MartínezNo ratings yet
- Lithium Recovery From Artificial Brine Using Energyefficient Membrane Distillation and Nanofiltration2020Journal of Membrane ScienceDocument7 pagesLithium Recovery From Artificial Brine Using Energyefficient Membrane Distillation and Nanofiltration2020Journal of Membrane ScienceYesid Tapiero MartínezNo ratings yet
- Lithium Recovery From Artificial Brine Using Energyefficient Membrane Distillation and Nanofiltration2020Journal of Membrane ScienceDocument7 pagesLithium Recovery From Artificial Brine Using Energyefficient Membrane Distillation and Nanofiltration2020Journal of Membrane ScienceYesid Tapiero MartínezNo ratings yet
- Membrane-Assisted Crystallization A Molecular View of NaCl Nucleation and GrowthDocument17 pagesMembrane-Assisted Crystallization A Molecular View of NaCl Nucleation and GrowthYesid Tapiero MartínezNo ratings yet
- A Speciation Based Model For Mixed Solvent Electrolyte SystemsDocument36 pagesA Speciation Based Model For Mixed Solvent Electrolyte SystemsYesid Tapiero MartínezNo ratings yet
- Steady-State Nonisothermal Reactor Design Energy BalanceDocument130 pagesSteady-State Nonisothermal Reactor Design Energy BalanceYesid Tapiero MartínezNo ratings yet
- Volumetric Properties of Single Aqueous Electrolytes From Zero To Saturation Concentration at 298K Represented by Pitzers Ion Interaction Equations PDFDocument28 pagesVolumetric Properties of Single Aqueous Electrolytes From Zero To Saturation Concentration at 298K Represented by Pitzers Ion Interaction Equations PDFYesid Tapiero MartínezNo ratings yet
- Review of the Common-ion Effect and its Applications in ChemistryDocument7 pagesReview of the Common-ion Effect and its Applications in ChemistryYesid Tapiero MartínezNo ratings yet
- Model Calculates Heat Capacity of Complex Aqueous SolutionsDocument36 pagesModel Calculates Heat Capacity of Complex Aqueous SolutionsYesid Tapiero Martínez100% (1)
- Electrokinetic Potential of Particles in SuspensionsDocument5 pagesElectrokinetic Potential of Particles in SuspensionsYesid Tapiero MartínezNo ratings yet
- Separation Science and TechnologyDocument18 pagesSeparation Science and TechnologyYesid Tapiero MartínezNo ratings yet
- Iocl Section 1 - Process SpecficationDocument73 pagesIocl Section 1 - Process SpecficationYogi173No ratings yet
- Format Bahasa Inggeris UPSR 2016 ENGLISH (013) Section ADocument33 pagesFormat Bahasa Inggeris UPSR 2016 ENGLISH (013) Section AVINOTININo ratings yet
- People Magazine Ronnie Van Zant 4Document1 pagePeople Magazine Ronnie Van Zant 4Randy CarterNo ratings yet
- A Review of Drug-Induced Acute Angle Closure Glaucoma For Non-Ophthalmologists PDFDocument8 pagesA Review of Drug-Induced Acute Angle Closure Glaucoma For Non-Ophthalmologists PDFMeida Putri UtamiNo ratings yet
- Include The Following in Your RTI ApplicationDocument4 pagesInclude The Following in Your RTI ApplicationRam LoharNo ratings yet
- Acromegaly: Excess Growth Hormone SecretionDocument4 pagesAcromegaly: Excess Growth Hormone SecretionKavita PathakNo ratings yet
- WHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)Document3 pagesWHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)114912No ratings yet
- EVBAT00100 Batterij ModuleDocument1 pageEVBAT00100 Batterij ModuleSaptCahbaguzNo ratings yet
- ResiboDocument1 pageResiboAlex RespicioNo ratings yet
- Pharm.D 2nd Year SyllabusDocument21 pagesPharm.D 2nd Year Syllabus12 E 36 Yatri PatelNo ratings yet
- Adult Assessment: Head To Toe Assessment Is The Baseline and Ongoing Data That Is Needed OnDocument2 pagesAdult Assessment: Head To Toe Assessment Is The Baseline and Ongoing Data That Is Needed OnAldrin NavarroNo ratings yet
- Complete Dummy's Guide to a Diffusion Pumped Vacuum SystemDocument4 pagesComplete Dummy's Guide to a Diffusion Pumped Vacuum Systemjokerbuddy01No ratings yet
- Cs Varnavrat Land SlideDocument7 pagesCs Varnavrat Land SlideBIJAY KRISHNA DASNo ratings yet
- Dezurik Balancing Valves Flow Curve 12quot 300mm 12-30-1jDocument1 pageDezurik Balancing Valves Flow Curve 12quot 300mm 12-30-1jgm_revankar3942No ratings yet
- Physical Properties of Groups 1, 17 and 18 ElementsDocument5 pagesPhysical Properties of Groups 1, 17 and 18 ElementslenovosubaNo ratings yet
- SOP - APS - PUR - 02A - Flow Chart For PurchaseDocument2 pagesSOP - APS - PUR - 02A - Flow Chart For Purchaseprakash patelNo ratings yet
- 08 Ergonomics - 01Document35 pages08 Ergonomics - 01Cholan PillaiNo ratings yet
- Renub Research: Singapore Medical Tourist Arrivals, Medical Tourism Market & Forecast To 2015Document13 pagesRenub Research: Singapore Medical Tourist Arrivals, Medical Tourism Market & Forecast To 2015api-114525849No ratings yet
- Amul - BCG MatrixDocument9 pagesAmul - BCG MatrixBaidhani Mandal100% (1)
- Inas Faiqah BT Mohd Helmi (An Infant Suing Through Her Father and Next Friend, Mohd Helmi Bin Abdul Aziz) V Kerajaan Malaysia & OrsDocument15 pagesInas Faiqah BT Mohd Helmi (An Infant Suing Through Her Father and Next Friend, Mohd Helmi Bin Abdul Aziz) V Kerajaan Malaysia & Orsshukri77No ratings yet
- Exercise 5 - Journalizing TransactionsDocument10 pagesExercise 5 - Journalizing TransactionsMichael DiputadoNo ratings yet
- Bone Tumours and MalignanciesDocument55 pagesBone Tumours and MalignanciesFreeburn SimunchembuNo ratings yet
- Demand, Supply, and Market Equilibrium: Mcgraw-Hill/IrwinDocument34 pagesDemand, Supply, and Market Equilibrium: Mcgraw-Hill/IrwinLillian KobusingyeNo ratings yet
- By Pass System in The Dry ProcessDocument34 pagesBy Pass System in The Dry Processfaheemqc100% (1)
- RUPEX Coupling RWNDocument26 pagesRUPEX Coupling RWNWaris La Joi WakatobiNo ratings yet
- Viom Networks Becomes The First Indian Telecom Infrastructure Company To Receive ISO 14001 & OHSAS 18001 CertificationDocument2 pagesViom Networks Becomes The First Indian Telecom Infrastructure Company To Receive ISO 14001 & OHSAS 18001 CertificationViom NetworksNo ratings yet
- How to Compost at Home: A Guide to the BasicsDocument10 pagesHow to Compost at Home: A Guide to the BasicsYeo Choon SengNo ratings yet
- Sect 5Document25 pagesSect 5PuneetNo ratings yet
- Principle of Economics Consolidated Assignements-2 - 10th February 22Document27 pagesPrinciple of Economics Consolidated Assignements-2 - 10th February 22Mani Bhushan SinghNo ratings yet
- Contracts Summary: 601 Totaling $4.76 BillionDocument186 pagesContracts Summary: 601 Totaling $4.76 BillionJAGUAR GAMINGNo ratings yet