You might also like
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Solution Problem 5Document5 pagesSolution Problem 5DeVillersSeciNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Signals and Systems (Practice Questions - Laplace Transform)Document26 pagesSignals and Systems (Practice Questions - Laplace Transform)madivala nagaraja0% (1)
- Course Project 2023-2024 Group 2Document8 pagesCourse Project 2023-2024 Group 2elkjgNo ratings yet
- Course Project 2023-2024 Group 1Document8 pagesCourse Project 2023-2024 Group 1elkjgNo ratings yet
- Chapter 4. Solutions: Yk Yk Yk Uk Uk K Yk Yk Yk Uk Uk K Yk Yk Yk Uk KDocument27 pagesChapter 4. Solutions: Yk Yk Yk Uk Uk K Yk Yk Yk Uk Uk K Yk Yk Yk Uk KMichaelNo ratings yet
- On Frequency Domain Criterion of FiniteDocument8 pagesOn Frequency Domain Criterion of FiniteAlexander VoltaNo ratings yet
- Lec.3 ZtransformDocument25 pagesLec.3 ZtransformyfmihweasaNo ratings yet
- Ch16_Laplace Transforms IIDocument38 pagesCh16_Laplace Transforms IIdadsdNo ratings yet
- Transformada ZDocument17 pagesTransformada Znikika1No ratings yet
- MOOC Assignment-3 Answers PDFDocument15 pagesMOOC Assignment-3 Answers PDFvamshiNo ratings yet
- Jacobians and Manipulator SingularitiesDocument35 pagesJacobians and Manipulator SingularitiessivaeeinfoNo ratings yet
- Discrete Approximation of Continuous Systems: CSE 421 Digital ControlDocument15 pagesDiscrete Approximation of Continuous Systems: CSE 421 Digital ControlAhmed YounisNo ratings yet
- Root Locues PDFDocument32 pagesRoot Locues PDFnoor deenNo ratings yet
- PWM Current Source ConvertersDocument21 pagesPWM Current Source ConvertersJordi El MariachetNo ratings yet
- Tutorial 3 - Time Response PDFDocument3 pagesTutorial 3 - Time Response PDFAmylia NatashaNo ratings yet
- NTF - Design - For - Coeffiecents - in Practical - OTA - Systematic - Design - Centering - of - Continuous - Time - Oversampling - ConvertersDocument5 pagesNTF - Design - For - Coeffiecents - in Practical - OTA - Systematic - Design - Centering - of - Continuous - Time - Oversampling - Convertersbhargav nagarajuNo ratings yet
- NCB 10103: Mathematics For Engineers 1 Complex Number Tutorial 5Document5 pagesNCB 10103: Mathematics For Engineers 1 Complex Number Tutorial 5aNo ratings yet
- Mathematical Modeling Techniques in Control SystemsDocument20 pagesMathematical Modeling Techniques in Control SystemsMouadh WahraniNo ratings yet
- TIFR-2010: 1 X For X 0 1 X For X 0Document7 pagesTIFR-2010: 1 X For X 0 1 X For X 0Shubham JangidNo ratings yet
- Impulse Invariance and BilinearDocument8 pagesImpulse Invariance and BilinearAnang MarufNo ratings yet
- Lecture-3 Diff and SS EquationsDocument19 pagesLecture-3 Diff and SS EquationsZeeshan RafiqNo ratings yet
- Toturial 1 Haibo Faradays LawDocument4 pagesToturial 1 Haibo Faradays LawShoaib Ur RehmanNo ratings yet
- DCS 2Document20 pagesDCS 2Anna BrookeNo ratings yet
- Airways - Multilateration Phase I Gen PDFDocument18 pagesAirways - Multilateration Phase I Gen PDFmavv5455No ratings yet
- hw2 SoluDocument9 pageshw2 SoluRegner Muñoz SantillanNo ratings yet
- Introduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridDocument25 pagesIntroduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridTiliksew Wudie AssabeNo ratings yet
- Chapter IIDocument30 pagesChapter IISwarndevi KmNo ratings yet
- Slide 1 - Slide 1Document52 pagesSlide 1 - Slide 1maketoNo ratings yet
- Exercise 3 LinearDocument5 pagesExercise 3 LinearWajih AbboudNo ratings yet
- DTState SpaceDocument11 pagesDTState SpaceWonbae ChoiNo ratings yet
- Time Series hw5Document4 pagesTime Series hw5euler96100% (2)
- Root Locus Analysis of Three-Pole SystemsDocument8 pagesRoot Locus Analysis of Three-Pole SystemsTam PhamNo ratings yet
- Lecture 13 Signal Flow Graphs and Mason, S RuleDocument27 pagesLecture 13 Signal Flow Graphs and Mason, S RuleHamza KhanNo ratings yet
- Control PDFDocument26 pagesControl PDFFlat MateNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument26 pagesControl Systems: GATE Objective & Numerical Type SolutionsFlat Mate67% (3)
- Kendali Digital 6Document9 pagesKendali Digital 6SutantoNo ratings yet
- EP 5511 - Lecture 09Document23 pagesEP 5511 - Lecture 09Solomon Tadesse AthlawNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityAditya JadejaNo ratings yet
- Solution End Sem 2022-23Document12 pagesSolution End Sem 2022-23Prasann KatiyarNo ratings yet
- Time Response PDFDocument104 pagesTime Response PDFMeshach KumarNo ratings yet
- Control System 2 (Cont of 1)Document13 pagesControl System 2 (Cont of 1)K.Magenthran (UTHM)No ratings yet
- Homework solutions for fluid dynamics chapters 5 and 6Document6 pagesHomework solutions for fluid dynamics chapters 5 and 6丁偉庭No ratings yet
- Electrical Engg 2005Document20 pagesElectrical Engg 2005chandrakanthNo ratings yet
- 2 Design of Discrete Control Systems - RootLocusDocument17 pages2 Design of Discrete Control Systems - RootLocusYang YingNo ratings yet
- Jest 2014 PhysicsDocument7 pagesJest 2014 PhysicsKritiraj KalitaNo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document3 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- Control System AssignmentsDocument75 pagesControl System AssignmentsSrijan DwivediNo ratings yet
- Kendali Digital-5 - Discrete Control Design 2Document21 pagesKendali Digital-5 - Discrete Control Design 2Chinta WulandariNo ratings yet
- Principal CoordinatesDocument6 pagesPrincipal CoordinatesDanielNo ratings yet
- Robotics 150722060709 Lva1 App6891Document26 pagesRobotics 150722060709 Lva1 App6891Samuel AdenijiNo ratings yet
- Guest 5Document68 pagesGuest 5api-3697260No ratings yet
- Iit Jam Physics 2009Document6 pagesIit Jam Physics 2009Subha NayakNo ratings yet
- Dr. Engy Aly Maher: Winter 2021Document66 pagesDr. Engy Aly Maher: Winter 2021ngmaherNo ratings yet
- GTU BE Semester VII Digital Signal Processing Exam QuestionsDocument2 pagesGTU BE Semester VII Digital Signal Processing Exam QuestionsM.k. PrajapatNo ratings yet
- Sistemas de Control para Ingenieria 3 EdDocument73 pagesSistemas de Control para Ingenieria 3 EdNieves Rubi Lopez QuistianNo ratings yet
- 25SMC Tutorial 2Document6 pages25SMC Tutorial 2DIABLONo ratings yet
- LinearDocument2 pagesLinearYee Jing TanNo ratings yet
- VL2022230502064 Da02Document2 pagesVL2022230502064 Da02Asmit Anand Singh 21BEE0130No ratings yet
- 08 COMPACT Prekidaci 80-3200ADocument469 pages08 COMPACT Prekidaci 80-3200AThông NguyễnNo ratings yet
- DWG & Spec of DTFR - Cuon KhangDocument1 pageDWG & Spec of DTFR - Cuon KhangThông NguyễnNo ratings yet
- Link Cài Đặt Thư Viện Arduino Và LabviewDocument1 pageLink Cài Đặt Thư Viện Arduino Và LabviewThông NguyễnNo ratings yet
- XXXDocument1 pageXXXThông NguyễnNo ratings yet
- Bang Tieu Chuan Thanh CaiDocument2 pagesBang Tieu Chuan Thanh CaiThông NguyễnNo ratings yet
- Catalogo Transferencias Schneider PDFDocument110 pagesCatalogo Transferencias Schneider PDFOscar CastroNo ratings yet
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNo ratings yet
- Wireless Notice-Board Using Node MCUDocument4 pagesWireless Notice-Board Using Node MCURahul SharmaNo ratings yet
- ComutatoareDocument94 pagesComutatoaremchisNo ratings yet
- Moeller CatalogDocument659 pagesMoeller CatalogGregg JamesNo ratings yet
- LM 1117Document38 pagesLM 1117taytaboogiemanNo ratings yet
- MCCB and ELCB Technical NotesDocument183 pagesMCCB and ELCB Technical NotesdewiNo ratings yet
- Micro800 Architecture For Powerflex Drives Communication On Ethernet/IpDocument5 pagesMicro800 Architecture For Powerflex Drives Communication On Ethernet/IpThông NguyễnNo ratings yet
- Micro800 Architecture For Powerflex Drives Communication On Ethernet/IpDocument5 pagesMicro800 Architecture For Powerflex Drives Communication On Ethernet/IpThông NguyễnNo ratings yet
- Micro 830 & 850 User ManualDocument360 pagesMicro 830 & 850 User Manualryanmalsem50% (2)
- USB To Serial Chip CH340: The Datasheet of Ch340 (The First) 1Document11 pagesUSB To Serial Chip CH340: The Datasheet of Ch340 (The First) 1Thông NguyễnNo ratings yet
- 1 - Allen Bradley NetworkDocument117 pages1 - Allen Bradley NetworkThông Nguyễn100% (1)
- 520-Um001 - PowerFlex 525 Adjustable Frequency AC Drive User Manual PDFDocument240 pages520-Um001 - PowerFlex 525 Adjustable Frequency AC Drive User Manual PDFThông NguyễnNo ratings yet
- 2080 rm001 - en eDocument752 pages2080 rm001 - en eCuong PhamNo ratings yet
- 1783-Um007 Stratix 800 - En-PDocument438 pages1783-Um007 Stratix 800 - En-PGian AlvesNo ratings yet
- E32 Series: SX1278 Wireless ModuleDocument24 pagesE32 Series: SX1278 Wireless ModuleThông NguyễnNo ratings yet
- 2080 Um002 - en e PDFDocument354 pages2080 Um002 - en e PDFswarupkumarnayakNo ratings yet
- Customized Function Blocks For DatasiteDocument120 pagesCustomized Function Blocks For DatasiteThông NguyễnNo ratings yet
- Rockwell Automation Documents - New - VersionDocument174 pagesRockwell Automation Documents - New - VersionThông NguyễnNo ratings yet
- Read The Passage and Answer The Questions Below: I. Reading Comprehension (2, 5 Marks)Document2 pagesRead The Passage and Answer The Questions Below: I. Reading Comprehension (2, 5 Marks)Thông NguyễnNo ratings yet
- 2080 pp003 - en P PDFDocument2 pages2080 pp003 - en P PDFFranciscus Xaverius IrawanNo ratings yet
- Micro800 Serie PDFDocument50 pagesMicro800 Serie PDFRodney PimentaNo ratings yet
- 520-Um001 - PowerFlex 525 Adjustable Frequency AC Drive User Manual PDFDocument240 pages520-Um001 - PowerFlex 525 Adjustable Frequency AC Drive User Manual PDFThông NguyễnNo ratings yet
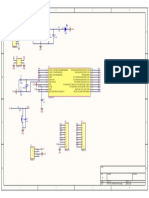
- STM8S103F3P6 Schematic DiagramDocument1 pageSTM8S103F3P6 Schematic DiagramMoshkan Miraghazadeh100% (1)
- Understanding The American Education SystemDocument6 pagesUnderstanding The American Education SystemCastor JavierNo ratings yet
- Static GK For Iift Snap and XatDocument19 pagesStatic GK For Iift Snap and XatnavinkumargNo ratings yet
- LeCroy 1996 Catalog (Reduced Size) PDFDocument196 pagesLeCroy 1996 Catalog (Reduced Size) PDFpetrocelliNo ratings yet
- Datasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Document5 pagesDatasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Gherel TocasNo ratings yet
- Battery Calculations For Fire Alarm and Signaling SystemsDocument7 pagesBattery Calculations For Fire Alarm and Signaling Systemsleland macasinag100% (1)
- Community Development and Umbrella BodiesDocument20 pagesCommunity Development and Umbrella Bodiesmoi5566No ratings yet
- Template Research ProjectDocument13 pagesTemplate Research ProjectTuấn Anh Đoàn CôngNo ratings yet
- Price List 2014: Valid From 01.04.2014, Prices in Euro, Excluding VAT. Previous Price Lists Will Become InvalidDocument106 pagesPrice List 2014: Valid From 01.04.2014, Prices in Euro, Excluding VAT. Previous Price Lists Will Become InvalidarifNo ratings yet
- 3 Kinds of de Facto Government:: CharacteristicsDocument10 pages3 Kinds of de Facto Government:: CharacteristicsAbigael SeverinoNo ratings yet
- Event Management Study Material Free PDFDocument2 pagesEvent Management Study Material Free PDFKim0% (1)
- 04 Greeting Card Activity RubricDocument1 page04 Greeting Card Activity RubricJon Jon Marcos100% (2)
- World of Steel® - Material Grade PDFDocument35 pagesWorld of Steel® - Material Grade PDFNugraha BintangNo ratings yet
- Proposed Rule: Employment: Adverse ActionsDocument4 pagesProposed Rule: Employment: Adverse ActionsJustia.comNo ratings yet
- Court Invalidates Mortgage Due to Bank's Lack of DiligenceDocument10 pagesCourt Invalidates Mortgage Due to Bank's Lack of DiligenceTokie TokiNo ratings yet
- Excel - Bachelorprojekt - Bertil Theis JørgensenDocument944 pagesExcel - Bachelorprojekt - Bertil Theis JørgensenBertil JørgensenNo ratings yet
- Aclu List Research Export 20160810050210Document2 pagesAclu List Research Export 20160810050210api-285701682100% (1)
- CW3 - 4Document2 pagesCW3 - 4Rigel Zabate100% (1)
- JKM320PP-72 305-320 Watt Poly Crystalline Solar Module Technical SpecificationsDocument2 pagesJKM320PP-72 305-320 Watt Poly Crystalline Solar Module Technical SpecificationsRonal100% (1)
- People v. ChuaDocument1 pagePeople v. ChuaErnie Gultiano100% (1)
- TABS 6SellSheetDocument4 pagesTABS 6SellSheetHernando MontenegroNo ratings yet
- ERecon Software Development at Hospital Corporation of America-1553395398 PDFDocument11 pagesERecon Software Development at Hospital Corporation of America-1553395398 PDFKaren CarranzaNo ratings yet
- Contradictions That Drive Toyota's SuccessDocument7 pagesContradictions That Drive Toyota's SuccesskidurexNo ratings yet
- Filling Out Forms Detailed Lesson Plan in English VDocument9 pagesFilling Out Forms Detailed Lesson Plan in English VAIAN CALIBAYAN0% (1)
- TD2Document4 pagesTD2Terry ChoiNo ratings yet
- Due Diligence InvestmentsDocument6 pagesDue Diligence InvestmentselinzolaNo ratings yet
- Appendix 2 Overview On HRM Defintions Contribution and Avenues For Future ResearchDocument6 pagesAppendix 2 Overview On HRM Defintions Contribution and Avenues For Future ResearchBarun Kumar SinghNo ratings yet
- Market Segmentation Targeting Strategy and Positioning Strategy Performance Effects To The Tourists Satisfaction Research in Pangandaran Beach Pangandaran DistrictDocument10 pagesMarket Segmentation Targeting Strategy and Positioning Strategy Performance Effects To The Tourists Satisfaction Research in Pangandaran Beach Pangandaran DistrictRizki Kurnia husainNo ratings yet
- Trace Log 20131229152625Document3 pagesTrace Log 20131229152625Razvan PaleaNo ratings yet
- Nikita Rajput: Anchor/Host/Master of CeremoniesDocument21 pagesNikita Rajput: Anchor/Host/Master of CeremoniesnamanNo ratings yet
- How To Install Blue PrismDocument2 pagesHow To Install Blue PrismRanjith NarayanNo ratings yet