You might also like
- Newapps HughesDocument14 pagesNewapps HughesXa MauNo ratings yet
- Design Considerations For III Dynamically Positioned VesselsDocument22 pagesDesign Considerations For III Dynamically Positioned VesselsSHARATHNo ratings yet
- Underwater Rov ThesisDocument4 pagesUnderwater Rov Thesisafcmayfzq100% (1)
- Omae2015 41020 2Document8 pagesOmae2015 41020 2Arun Kumar PancharajNo ratings yet
- FlatFish - A Compact Subsea-Resident Inspection AUVDocument9 pagesFlatFish - A Compact Subsea-Resident Inspection AUVAlberto RuizNo ratings yet
- NMF Technology Roadmap 1920 V3 PDFDocument32 pagesNMF Technology Roadmap 1920 V3 PDFAl-Razzaq Al-WahhabNo ratings yet
- Dynamic Positioning ThesisDocument7 pagesDynamic Positioning ThesisMaria Perkins100% (2)
- Dynamic PositioningDocument31 pagesDynamic PositioningU Zaw Aung100% (3)
- RR 307Document58 pagesRR 307sere55No ratings yet
- PLET Installation in Deepwater Based On Tension Control and Length ControlDocument13 pagesPLET Installation in Deepwater Based On Tension Control and Length Controlatish_g4100% (1)
- Design ArgallDocument15 pagesDesign ArgallXa MauNo ratings yet
- Seaside Operations in Container Terminals Literature Overview Trends and Research DirectionsDocument46 pagesSeaside Operations in Container Terminals Literature Overview Trends and Research DirectionsHậu PhạmNo ratings yet
- Shuttle GustavsenDocument41 pagesShuttle GustavsenXa MauNo ratings yet
- Development and Classification of Heave Compensation TechnologyDocument7 pagesDevelopment and Classification of Heave Compensation TechnologyYuhNo ratings yet
- Ukc Final Tcs ReportDocument110 pagesUkc Final Tcs ReportScribd1427No ratings yet
- Experiments PicoSatellite MaritimeSecurityDocument11 pagesExperiments PicoSatellite MaritimeSecuritymarcomansoNo ratings yet
- Green Line TelemetryDocument18 pagesGreen Line Telemetryshadow_x3xNo ratings yet
- BMTDSL Designing SSKs Vidar Confpaper UDTPacific Oct08Document17 pagesBMTDSL Designing SSKs Vidar Confpaper UDTPacific Oct08DUNCAN0420No ratings yet
- Plug and Abandonment Campaigns From A Riserless Light Well Intervention Vessel Provide Cost Savings For Subsea Well AbandonmentsDocument19 pagesPlug and Abandonment Campaigns From A Riserless Light Well Intervention Vessel Provide Cost Savings For Subsea Well Abandonmentserdal aydinNo ratings yet
- Further Developments of Multi-Purpose Underwater Data Collection Devices Deployed With ROVDocument6 pagesFurther Developments of Multi-Purpose Underwater Data Collection Devices Deployed With ROVmccatysNo ratings yet
- Mooring PublicationDocument11 pagesMooring PublicationNinad Anil Bhaskarwar oe21m012No ratings yet
- Container Terminal Operation - Current Trends and Future ChallengesDocument32 pagesContainer Terminal Operation - Current Trends and Future ChallengesAkram Faisal100% (2)
- Maritime Domain Awareness: HF-Radar ComponentDocument40 pagesMaritime Domain Awareness: HF-Radar ComponentRUCOOLNo ratings yet
- WO0114 Shell HalliburtonDocument4 pagesWO0114 Shell HalliburtonLoganBohannonNo ratings yet
- The Influence of The Bow Shape On The Operability of A Fast Ship in A Seaway - Keuning, Gelling 2006Document16 pagesThe Influence of The Bow Shape On The Operability of A Fast Ship in A Seaway - Keuning, Gelling 2006haujesNo ratings yet
- Optimal Policies For Maintaining A Supply Service in The Norwegian SeaDocument7 pagesOptimal Policies For Maintaining A Supply Service in The Norwegian SeaAlexandraNo ratings yet
- Active Pendulation Control System (APCS)Document101 pagesActive Pendulation Control System (APCS)mario InzaghiNo ratings yet
- 2015 Naval Strategy Final Web - AshxDocument56 pages2015 Naval Strategy Final Web - AshxsamlagroneNo ratings yet
- The Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed TechnologyDocument5 pagesThe Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed Technologyaarthi devNo ratings yet
- Design of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)Document11 pagesDesign of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)leokareyxoxoersNo ratings yet
- Using online data to estimate container terminal demandDocument26 pagesUsing online data to estimate container terminal demandErkinNo ratings yet
- Submarine Power and Propulsion BMT Defence 2008Document17 pagesSubmarine Power and Propulsion BMT Defence 2008Álvaro Conti Filho100% (1)
- Trends and Challenges in Unmanned Surface Vehicles (USV) - From Survey To ShippingDocument8 pagesTrends and Challenges in Unmanned Surface Vehicles (USV) - From Survey To ShippingVORTICE ENGINEERING AND CONSTRUCTIONNo ratings yet
- Naval Operations in An Ice Free ArcticDocument70 pagesNaval Operations in An Ice Free Arctic420No ratings yet
- BMTDSL Landing Craft Conpaper MAST Nov08 PDFDocument11 pagesBMTDSL Landing Craft Conpaper MAST Nov08 PDFJOSE PRASOBH..J100% (1)
- Access and EgressDocument13 pagesAccess and EgressVan LianNo ratings yet
- Uptime Helideck - Active Roll Compensated Helideck Ensure Safe and Effective Crew-Change On Offshore VesselsDocument13 pagesUptime Helideck - Active Roll Compensated Helideck Ensure Safe and Effective Crew-Change On Offshore VesselsprobakarNo ratings yet
- Bubble WakeDocument6 pagesBubble WakehelloyvnNo ratings yet
- c1Document32 pagesc1Andreea BurceaNo ratings yet
- FPSO Turret Safety AssessmentDocument29 pagesFPSO Turret Safety AssessmentRenato BenintendiNo ratings yet
- Design Modelling and Analysis of A Large FloatingDocument29 pagesDesign Modelling and Analysis of A Large FloatingAdrNo ratings yet
- MARIN's New Seakeeping and Manoeuvring Basin for Hydrodynamic ResearchDocument12 pagesMARIN's New Seakeeping and Manoeuvring Basin for Hydrodynamic ResearchibadurrahmanNo ratings yet
- PEO Maritime Portfolio OverviewDocument22 pagesPEO Maritime Portfolio OverviewlvcsysNo ratings yet
- Imarest Rina KL MJB 8 Mar 13 ActualDocument19 pagesImarest Rina KL MJB 8 Mar 13 ActualalyshahNo ratings yet
- NSTL ReportDocument22 pagesNSTL ReportAbel EbinNo ratings yet
- SPE-173659-MS Performing Riserless Subsea Operations Utilizing Coiled Tubing in Open WaterDocument9 pagesSPE-173659-MS Performing Riserless Subsea Operations Utilizing Coiled Tubing in Open WaterLawrence MbahNo ratings yet
- Frederike Nugteren - Final Report Graduation 12.05 2Document142 pagesFrederike Nugteren - Final Report Graduation 12.05 2Kok Jin OoiNo ratings yet
- Applied Mathematical Modelling: Gyoungwoo Lee, S. Surendran, Sang-Hyun KimDocument17 pagesApplied Mathematical Modelling: Gyoungwoo Lee, S. Surendran, Sang-Hyun KimAhmad HajivandNo ratings yet
- Drifters As Preliminary Site Assessment Tool For Ocean Current-Based Renewable Energy PDFDocument5 pagesDrifters As Preliminary Site Assessment Tool For Ocean Current-Based Renewable Energy PDFMariana Quintero LondoñoNo ratings yet
- Applied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenDocument13 pagesApplied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenMilton AlvaradoNo ratings yet
- Helicopter Operations for Offshore Ships Final JIP ProposalDocument18 pagesHelicopter Operations for Offshore Ships Final JIP ProposalnsureshbabuNo ratings yet
- Stability Committee Report on Capsizing ResearchDocument39 pagesStability Committee Report on Capsizing ResearchpawtarlayNo ratings yet
- OTC19073 Float-Overs Offshore West AfricaDocument10 pagesOTC19073 Float-Overs Offshore West AfricaCees van ZandvlietNo ratings yet
- Multi-Tiered SHM for Monitoring Ship StructuresDocument20 pagesMulti-Tiered SHM for Monitoring Ship StructuresJanatan ChoiNo ratings yet
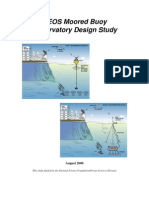
- Buoy DesignDocument97 pagesBuoy DesignHollanda CocobearNo ratings yet
- UDT 2012 Conference Programme 16 05 12Document3 pagesUDT 2012 Conference Programme 16 05 12alexandre_motta_3No ratings yet
- 4.PMW 770 - NDIA Fall Forum 2016 Brief - OCT16Document20 pages4.PMW 770 - NDIA Fall Forum 2016 Brief - OCT16spmtawi lsmaipawiNo ratings yet
- Wave LengthhDocument20 pagesWave Lengthhmabm89No ratings yet
- LNG Terminal Engineering and Maintenance Standards (LNGTEMS)Document7 pagesLNG Terminal Engineering and Maintenance Standards (LNGTEMS)Alexander MaksaevNo ratings yet
- Fender Systems Ver3 - 9Document5 pagesFender Systems Ver3 - 9aandueza_1No ratings yet
- AG 18420 Penguard Pro GF Euk GBDocument12 pagesAG 18420 Penguard Pro GF Euk GBaandueza_1No ratings yet
- XLF60 Owners Manual 1Document78 pagesXLF60 Owners Manual 1aandueza_1No ratings yet
- TLE2015 05TekmarineCatalogueR001cDocument18 pagesTLE2015 05TekmarineCatalogueR001caandueza_1No ratings yet
- Fender Systems Ver3 - 9Document5 pagesFender Systems Ver3 - 9aandueza_1No ratings yet
- XLF60 Service Manual 1Document18 pagesXLF60 Service Manual 1aandueza_1No ratings yet
- TLE2015 05TekmarineCatalogueR001cDocument18 pagesTLE2015 05TekmarineCatalogueR001caandueza_1No ratings yet
- Drafts - Concrete - Nov 24, 2021Document8 pagesDrafts - Concrete - Nov 24, 2021aandueza_1No ratings yet
- QVF by 9 JDocument1 pageQVF by 9 Jaandueza_1No ratings yet
- 68 PNCQ ODocument1 page68 PNCQ Oaandueza_1No ratings yet
- 190924-N-BI924-9813 USNS GillilandDocument1 page190924-N-BI924-9813 USNS Gillilandaandueza_1No ratings yet
- Ku 6 y NPXDocument1 pageKu 6 y NPXaandueza_1No ratings yet
- Product Manual enDocument122 pagesProduct Manual enadacostNo ratings yet
- 5 1Document12 pages5 1mahakNo ratings yet
- GD-APS FutureWaves Oceans2016Document9 pagesGD-APS FutureWaves Oceans2016aandueza_1No ratings yet
- USNS Bob Hope Class in BremertonDocument1 pageUSNS Bob Hope Class in Bremertonaandueza_1No ratings yet
- Matias Bedroom: Designed by Maiya Rojas - Dec 1, 2021 Made For AndresDocument4 pagesMatias Bedroom: Designed by Maiya Rojas - Dec 1, 2021 Made For Andresaandueza_1No ratings yet
- ABS RECORD, The Online Database For ABS Vessel Records, Lists All Vessels and Offshore Installations in Class With ABS, Including Class NotationsDocument3 pagesABS RECORD, The Online Database For ABS Vessel Records, Lists All Vessels and Offshore Installations in Class With ABS, Including Class Notationsaandueza_1No ratings yet
- Newapps HughesDocument16 pagesNewapps Hughesaandueza_1No ratings yet
- SAP2000 Pipe Rack Modeling GuideDocument92 pagesSAP2000 Pipe Rack Modeling Guideagvelazquez100% (9)
- TAKR-300 USNS Bob HopeDocument2 pagesTAKR-300 USNS Bob Hopeaandueza_1No ratings yet
- Wheel Loader: Engine (Tier 4) Engine (Tier 2)Document28 pagesWheel Loader: Engine (Tier 4) Engine (Tier 2)Chenna VijayNo ratings yet
- HILTI PROFIS Anchor Design GuideDocument362 pagesHILTI PROFIS Anchor Design Guidearun_angshu100% (2)
- Pandas PDFDocument3,071 pagesPandas PDFJoemon JoseNo ratings yet
- Beginners Python Cheat Sheet PCC All PDFDocument26 pagesBeginners Python Cheat Sheet PCC All PDFName100% (1)
- Evaluate The Cylindrical Rubber Fender Response Under Dynamic LoadDocument5 pagesEvaluate The Cylindrical Rubber Fender Response Under Dynamic Loadaandueza_1No ratings yet
- NWSA Slide Deck For USNS Bob HopeDocument5 pagesNWSA Slide Deck For USNS Bob HopeWestSeattleBlogNo ratings yet
- Fender Design Test GuidelineDocument135 pagesFender Design Test GuidelineAleksa CavicNo ratings yet
- Beginners Python Cheat Sheet PCC All PDFDocument26 pagesBeginners Python Cheat Sheet PCC All PDFName100% (1)
- Pandas PDFDocument3,071 pagesPandas PDFJoemon JoseNo ratings yet
- PHD Thesis - Federico GaggiottiDocument212 pagesPHD Thesis - Federico GaggiottiadeshinexxNo ratings yet
- DNV Class NotationDocument31 pagesDNV Class Notationerudite_0206No ratings yet
- How to eliminate DP risks from jamming and spoofingDocument29 pagesHow to eliminate DP risks from jamming and spoofingDarwin PonteNo ratings yet
- System Modes K POS InterfaceDocument27 pagesSystem Modes K POS InterfaceIvaylo IvanovNo ratings yet
- DP TrainingDocument22 pagesDP TrainingAhmad ImranNo ratings yet
- Brochure OOS Gretha REV2.1 PDFDocument4 pagesBrochure OOS Gretha REV2.1 PDFVovchenko AlexandrNo ratings yet
- Career On Drilling RigDocument12 pagesCareer On Drilling RigAhmed BalochNo ratings yet
- DP familiarization course knowledgeDocument12 pagesDP familiarization course knowledgeKarina MirandaNo ratings yet
- FusionDocument20 pagesFusionelshadNo ratings yet
- Marksman Dp-Ins: Dynamic Positioning Inertial Reference SystemDocument6 pagesMarksman Dp-Ins: Dynamic Positioning Inertial Reference SystemrainNo ratings yet
- Lewek InspectorDocument4 pagesLewek InspectorDave M MichaelNo ratings yet
- Final Trex 52658Document26 pagesFinal Trex 52658OSDocs2012No ratings yet
- 153A DP System Icon - DNV CertificateDocument3 pages153A DP System Icon - DNV CertificateJosephNo ratings yet
- Structural Design: Norsok StandardDocument33 pagesStructural Design: Norsok Standardpremasiri karunarathneNo ratings yet
- Nist CSF 2020Document67 pagesNist CSF 2020jamssuperNo ratings yet
- Distributed Power Management System For Award Winner: UlsteinDocument2 pagesDistributed Power Management System For Award Winner: UlsteinLUATNo ratings yet
- HD11 - Ship SpecificationDocument1 pageHD11 - Ship SpecificationLuu Quang HoaNo ratings yet
- DP Operation and DP ModesDocument13 pagesDP Operation and DP Modesnancy domimguez moralesNo ratings yet
- DP Test AnswersDocument7 pagesDP Test AnswersАндрей Питкевич75% (4)
- Dynamic Positioning System OverviewDocument50 pagesDynamic Positioning System Overviewpraveen_meo1No ratings yet
- Fuzzy Controller Design For Dynamic Positioning of Unmanned Surface VehicleDocument6 pagesFuzzy Controller Design For Dynamic Positioning of Unmanned Surface VehicleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Kongsberg K-Pos DP Operator Manual 7.1.14Document374 pagesKongsberg K-Pos DP Operator Manual 7.1.14İlker Doğruok100% (1)
- 96 14saDocument233 pages96 14saiomerko100% (1)
- Toisa PolarisDocument4 pagesToisa PolarisssmedsNo ratings yet
- Corp BRCH Ds-8 RGB MasterDocument11 pagesCorp BRCH Ds-8 RGB MasterQingming Ma100% (1)
- Activity Specific Operating GuidelinesDocument18 pagesActivity Specific Operating Guidelinesnidhink18No ratings yet
- Rig Selection 3Document59 pagesRig Selection 3okeynaijaNo ratings yet
- DP NotationsDocument5 pagesDP NotationssandeepNo ratings yet
- DP3 Multi-Purpose Offshore Construction Vessel: Toisa ProteusDocument2 pagesDP3 Multi-Purpose Offshore Construction Vessel: Toisa Proteuslmorsal01No ratings yet
- Construction Vessel Guideline For The Offshore Renewables Industry (Published)Document39 pagesConstruction Vessel Guideline For The Offshore Renewables Industry (Published)christianford9793100% (1)