You might also like
- Service ManualDocument582 pagesService ManualBogdan Popescu100% (5)
- WebpdfDocument276 pagesWebpdfprateekvNo ratings yet
- Principal Hypotheses and Assumptions in Strength of MaterialsDocument9 pagesPrincipal Hypotheses and Assumptions in Strength of MaterialsJason Ross100% (1)
- ENIRAM - Guide To Dynamic Trim Optimization 280611 PDFDocument14 pagesENIRAM - Guide To Dynamic Trim Optimization 280611 PDFPhineas MagellanNo ratings yet
- CH4 FEM FOR TRUSSES - v2Document13 pagesCH4 FEM FOR TRUSSES - v2Eng.Hesham AL-HelaleeNo ratings yet
- Module 4 - Analysis of Beams Using Matrix Stiffness MethodDocument34 pagesModule 4 - Analysis of Beams Using Matrix Stiffness MethodVon TiosingNo ratings yet
- Finite Element MethodsDocument14 pagesFinite Element MethodspriyaankNo ratings yet
- Fundamental Principles of Mechanics: ME231: Solid Mechanics-IDocument14 pagesFundamental Principles of Mechanics: ME231: Solid Mechanics-IRohan sharmaNo ratings yet
- Chapter 5Document16 pagesChapter 5Usha GautamNo ratings yet
- Chapter 7Document44 pagesChapter 7Elmar CuellarNo ratings yet
- Beams On Elastic Foundation: 4.1 Beam TheoryDocument14 pagesBeams On Elastic Foundation: 4.1 Beam TheoryM YusupNo ratings yet
- 03b Direct Stiffness Method TrussDocument18 pages03b Direct Stiffness Method TrussAnamolNo ratings yet
- 4 Constitutive Equations: 4.1 ElasticityDocument24 pages4 Constitutive Equations: 4.1 ElasticityunastalavistaNo ratings yet
- 4 Traction and StressDocument16 pages4 Traction and Stressmuna222No ratings yet
- CHPT 4 - Development of Beams EquationsDocument46 pagesCHPT 4 - Development of Beams Equationsfatih reyhanNo ratings yet
- University of Nigeria, Nsukka: ME 431 - Theory of Elasticity IDocument14 pagesUniversity of Nigeria, Nsukka: ME 431 - Theory of Elasticity IEmmanuel JustinNo ratings yet
- 04 - Analysis of Beams Using Matrix Stiffness MethodDocument43 pages04 - Analysis of Beams Using Matrix Stiffness MethodRyiehmNo ratings yet
- FEM For FramesDocument12 pagesFEM For Framesrohit100% (1)
- PMP Dynamical Systems: Matrix EOM FormulationDocument11 pagesPMP Dynamical Systems: Matrix EOM FormulationAbdel DaaNo ratings yet
- 2 Finite Element MethodDocument25 pages2 Finite Element MethodShuhang ChenNo ratings yet
- Lec 5Document28 pagesLec 5prince francisNo ratings yet
- Force System and ResultantDocument20 pagesForce System and ResultantMyra GarciaNo ratings yet
- Mec412 Chap 2 Particle PDFDocument21 pagesMec412 Chap 2 Particle PDFhidayatullahNo ratings yet
- 1 - Matrix Method of Structural AnalysisDocument5 pages1 - Matrix Method of Structural AnalysistrixiaNo ratings yet
- Lesson Module 1 The Matrix Method of Structural AnalysisDocument14 pagesLesson Module 1 The Matrix Method of Structural AnalysisOtep TimusNo ratings yet
- 03 Equilibrio Cpo RigDocument8 pages03 Equilibrio Cpo RigAldo ArteagaNo ratings yet
- Chap 5Document28 pagesChap 5Mï XavierNo ratings yet
- Finite Element Method Chapter 4 - The DSMDocument17 pagesFinite Element Method Chapter 4 - The DSMsteven_gogNo ratings yet
- Experiment No 5: ObjectiveDocument4 pagesExperiment No 5: ObjectiveAhmed ImranNo ratings yet
- Node Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)Document32 pagesNode Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)KomarudinNo ratings yet
- 53 Engineering Mechanics: Oment of NertiaDocument6 pages53 Engineering Mechanics: Oment of NertiabertinNo ratings yet
- One-Dimensional Elements: Before 1960, The Field of Structural Analysis Was Restricted To One-Dimensional ElementsDocument15 pagesOne-Dimensional Elements: Before 1960, The Field of Structural Analysis Was Restricted To One-Dimensional ElementsRondro Ny Aina LuciaNo ratings yet
- Lecture 5Document17 pagesLecture 5Mr. Danish SaeedNo ratings yet
- Hoberman's SphereDocument10 pagesHoberman's SphereCot ConNo ratings yet
- Plane Stress and Plane Strain: 4.2.1 Displacement FunctionsDocument25 pagesPlane Stress and Plane Strain: 4.2.1 Displacement FunctionswearplayNo ratings yet
- 1 StressDocument36 pages1 StressWAKHIDATUN NISANo ratings yet
- CH 4 Review N SummaryDocument8 pagesCH 4 Review N SummaryabhiNo ratings yet
- Chapter 4-Theory-of-Elasticity-PG-Course PDFDocument15 pagesChapter 4-Theory-of-Elasticity-PG-Course PDFephNo ratings yet
- Axisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ADocument15 pagesAxisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ApnaxdNo ratings yet
- Principles of StaticsDocument10 pagesPrinciples of Staticsblue nnnNo ratings yet
- M 1 L 5Document15 pagesM 1 L 5rony41087No ratings yet
- Chapter 6b - Plane Stress/Strain EquationsDocument18 pagesChapter 6b - Plane Stress/Strain EquationsSemaneNo ratings yet
- Module 4: Deflection of Structures Lecture 4: Strain Energy MethodDocument6 pagesModule 4: Deflection of Structures Lecture 4: Strain Energy MethodPrathamesh NaikNo ratings yet
- 03 Stress 04 Stress Transformation EquationsDocument10 pages03 Stress 04 Stress Transformation Equationsfjranggara91No ratings yet
- Module 2 in Abe 215 Statics1 l1 5Document22 pagesModule 2 in Abe 215 Statics1 l1 5Cynel DelaNo ratings yet
- Planestates ZienkiewiczDocument25 pagesPlanestates ZienkiewiczRoberto Corona CidNo ratings yet
- 02 Robotics 19MTE Representation of FramesDocument15 pages02 Robotics 19MTE Representation of FramesDureshahwar QurbanNo ratings yet
- Chapter 4 AXIALY LOADED MEMBERS FINALDocument18 pagesChapter 4 AXIALY LOADED MEMBERS FINALk.ghanemNo ratings yet
- Resultants of Noncoplanar Force SystemsDocument14 pagesResultants of Noncoplanar Force SystemsChen CerroNo ratings yet
- Structural Analysis at BerkeleyDocument219 pagesStructural Analysis at Berkeleyjokrishnan100% (8)
- Klaus Elsasser and Sergey Popel - Plasma Equations in General RelativityDocument9 pagesKlaus Elsasser and Sergey Popel - Plasma Equations in General RelativityJuaxmawNo ratings yet
- Presentation of A New Membrane Strain-Based Finite Element For Static and Dynamic AnalysisDocument21 pagesPresentation of A New Membrane Strain-Based Finite Element For Static and Dynamic AnalysisKherfi AbdelhakNo ratings yet
- Sheet (3) Moment of F Abount Point 2D-3DDocument13 pagesSheet (3) Moment of F Abount Point 2D-3DSamir ZaghloolNo ratings yet
- Chapter 4.1 - Direct Stiffness Method - StructuralDocument49 pagesChapter 4.1 - Direct Stiffness Method - Structuralsanyam KanungaNo ratings yet
- Statics and Dynamics of Rigid BodiesDocument20 pagesStatics and Dynamics of Rigid BodiesJulia ChiesaNo ratings yet
- Void Growth in Plastic Solids NeedlemanDocument34 pagesVoid Growth in Plastic Solids NeedlemanVanaja JadapalliNo ratings yet
- Module 1.domDocument16 pagesModule 1.domAhmet ÖlmezNo ratings yet
- Department of Civil EngineeringDocument13 pagesDepartment of Civil Engineeringbinodjohndas0% (1)
- Smoothings of Piecewise Linear Manifolds. (AM-80), Volume 80From EverandSmoothings of Piecewise Linear Manifolds. (AM-80), Volume 80Rating: 5 out of 5 stars5/5 (1)
- Analogous Problems For Discrete Systems: (A) (B) Figure 6.1: One Dimensional Heat TransferDocument13 pagesAnalogous Problems For Discrete Systems: (A) (B) Figure 6.1: One Dimensional Heat TransferUsha GautamNo ratings yet
- Chapter 2Document12 pagesChapter 2Usha GautamNo ratings yet
- Chapter 3Document17 pagesChapter 3Usha GautamNo ratings yet
- Chapter 1Document8 pagesChapter 1Manjil PuriNo ratings yet
- Wish Upon A STAR: Presented By: Daulo, Eunice R. III - Block 3Document17 pagesWish Upon A STAR: Presented By: Daulo, Eunice R. III - Block 3nhyce18No ratings yet
- Case Study: Medisys Corp The Intense Care Product Development TeamDocument10 pagesCase Study: Medisys Corp The Intense Care Product Development TeamBig BNo ratings yet
- Cooling and Sealing Air System: Gas Turbine Training ManualDocument2 pagesCooling and Sealing Air System: Gas Turbine Training ManualVignesh SvNo ratings yet
- Iit JeeDocument8 pagesIit JeeRNo ratings yet
- Budget of Work Inquiries Investigations and Immersion 19 20Document1 pageBudget of Work Inquiries Investigations and Immersion 19 20alma florNo ratings yet
- 9A02505 Electrical Machines-IIIDocument4 pages9A02505 Electrical Machines-IIIsivabharathamurthyNo ratings yet
- Communicative English Lab Manual 1643268175Document24 pagesCommunicative English Lab Manual 1643268175Dimple BhatiNo ratings yet
- CASBA Directive 2074Document17 pagesCASBA Directive 2074vijaycool85No ratings yet
- Sem06 Gca InsoDocument2 pagesSem06 Gca InsoBogdan PistolNo ratings yet
- THE REFUND - Frigyes Karinthy: AuthorDocument6 pagesTHE REFUND - Frigyes Karinthy: AuthorMilind JamnekarNo ratings yet
- SFN ProfileDocument4 pagesSFN Profiledinesh panchalNo ratings yet
- Pile Capacity - An Overview - ScienceDirect TopicsDocument15 pagesPile Capacity - An Overview - ScienceDirect TopicssurNo ratings yet
- Anaximenes of MiletusDocument4 pagesAnaximenes of MiletusRosel Gonzalo-AquinoNo ratings yet
- Palmiye Leaflet 2015 enDocument4 pagesPalmiye Leaflet 2015 ensaraju_felixNo ratings yet
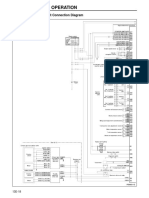
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument16 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarNo ratings yet
- Staad 4Document37 pagesStaad 4saisssms9116100% (2)
- Ground Architecture (Mourad Medhat)Document146 pagesGround Architecture (Mourad Medhat)Aída SousaNo ratings yet
- PASSAGE ONE (Questions 1-4)Document5 pagesPASSAGE ONE (Questions 1-4)Vian LonkzeerNo ratings yet
- Mech Syllabus R-2017 - 1Document110 pagesMech Syllabus R-2017 - 1goujjNo ratings yet
- EED516-Assignment 1 - S1 2023Document2 pagesEED516-Assignment 1 - S1 2023RETRO GAMERSNo ratings yet
- Haberman Data Logistic Regression AnalysisDocument5 pagesHaberman Data Logistic Regression AnalysisEvelynNo ratings yet
- UnitPlan (P.E) Grade 6Document13 pagesUnitPlan (P.E) Grade 6Lou At CamellaNo ratings yet
- Centralized PurchasingDocument2 pagesCentralized PurchasingbiyyamobulreddyNo ratings yet
- Executive Summary Report Julio13Document8 pagesExecutive Summary Report Julio13exxgineNo ratings yet
- NIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationDocument6 pagesNIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationKshitija100% (1)
- Malraux Anti-MemoiresDocument9 pagesMalraux Anti-MemoiresNevenaRistićNo ratings yet