You might also like
- CH3 Fundamentals For Finite Element Method - v2Document8 pagesCH3 Fundamentals For Finite Element Method - v2Eng.Hesham AL-Helalee100% (1)
- FEM For FramesDocument12 pagesFEM For Framesrohit100% (1)
- 03b Direct Stiffness Method TrussDocument18 pages03b Direct Stiffness Method TrussAnamolNo ratings yet
- CH7 FEM FOR TWO DIMENSIONAL SOLIDS - v2Document22 pagesCH7 FEM FOR TWO DIMENSIONAL SOLIDS - v2Eng.Hesham AL-HelaleeNo ratings yet
- Lecture 4.....Document30 pagesLecture 4.....GooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Department of Civil EngineeringDocument13 pagesDepartment of Civil Engineeringbinodjohndas0% (1)
- Transient Analysis in FEA - (New)Document57 pagesTransient Analysis in FEA - (New)Shreya PatilNo ratings yet
- Chapter 4Document20 pagesChapter 4Usha GautamNo ratings yet
- Development of Truss EquationsDocument63 pagesDevelopment of Truss EquationszcdscNo ratings yet
- Global Institute of Engineering and Technology Melvisharam-Vellore-632 509Document6 pagesGlobal Institute of Engineering and Technology Melvisharam-Vellore-632 509sathishneNo ratings yet
- For Beam AnalysisDocument29 pagesFor Beam AnalysisSakthivelNo ratings yet
- University of Liege Department Mécanique Des Matériaux & StructuresDocument34 pagesUniversity of Liege Department Mécanique Des Matériaux & StructuresDaniel PedrosaNo ratings yet
- Ellore 632 509 Department of MechanicalDocument6 pagesEllore 632 509 Department of MechanicalBALAKRISHNANNo ratings yet
- Module 4 - Analysis of Beams Using Matrix Stiffness MethodDocument34 pagesModule 4 - Analysis of Beams Using Matrix Stiffness MethodVon TiosingNo ratings yet
- Lecture 1Document51 pagesLecture 1MOHIT PANTNo ratings yet
- Introduction To Finite Element ModelingDocument5 pagesIntroduction To Finite Element Modelingmastura_rahim_3No ratings yet
- Chapter 6Document18 pagesChapter 6ehmyggasNo ratings yet
- FEA TheoryDocument49 pagesFEA Theoryabdulla_alazzawiNo ratings yet
- 03 - Analysis Reference - Chapter-3 ElementsDocument106 pages03 - Analysis Reference - Chapter-3 Elementsrahul pathakNo ratings yet
- FEA TheoryDocument49 pagesFEA Theoryof_switzerlandNo ratings yet
- By Pooja BhatiDocument39 pagesBy Pooja BhatiAbineshNo ratings yet
- Finite Element TheoryDocument32 pagesFinite Element Theoryshamsukarim2009No ratings yet
- Vibration AnalysisDocument17 pagesVibration AnalysispmagrawalNo ratings yet
- CHPT 4 - Development of Beams EquationsDocument46 pagesCHPT 4 - Development of Beams Equationsfatih reyhanNo ratings yet
- 04 - Analysis of Beams Using Matrix Stiffness MethodDocument43 pages04 - Analysis of Beams Using Matrix Stiffness MethodRyiehmNo ratings yet
- An Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical SimulationDocument16 pagesAn Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical Simulationaviraj2006No ratings yet
- CHAPTER 1 - Introduction To Finite Element Analysis - V2Document45 pagesCHAPTER 1 - Introduction To Finite Element Analysis - V2Alias HedgeNo ratings yet
- Axisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ADocument15 pagesAxisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ApnaxdNo ratings yet
- Chap 5Document28 pagesChap 5Mï XavierNo ratings yet
- Introduction To Finite Element Method PDFDocument13 pagesIntroduction To Finite Element Method PDFamodhyaNo ratings yet
- Node Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)Document32 pagesNode Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)KomarudinNo ratings yet
- 03 Analysis Reference Chapter-3 ElementsDocument112 pages03 Analysis Reference Chapter-3 ElementsGeoWest MHGeoLKNEGANo ratings yet
- Fem 3Document69 pagesFem 3Ramendra KumarNo ratings yet
- Plane Stress and Plane Strain: 4.2.1 Displacement FunctionsDocument25 pagesPlane Stress and Plane Strain: 4.2.1 Displacement FunctionswearplayNo ratings yet
- Chapter 3 Truss ElementsDocument19 pagesChapter 3 Truss Elementsanoop asokanNo ratings yet
- Finite Element MethodsDocument14 pagesFinite Element MethodspriyaankNo ratings yet
- 2D Triangular ElementsarticleDocument19 pages2D Triangular ElementsarticleYasirBashirNo ratings yet
- Somali National University: Finite Elements Design (FEM5901)Document22 pagesSomali National University: Finite Elements Design (FEM5901)Mohamed FarmaajoNo ratings yet
- Cad Chapter 5Document33 pagesCad Chapter 5Farhan VSNo ratings yet
- Lecture Resume - Isoprametric ConceptDocument40 pagesLecture Resume - Isoprametric ConceptlenykingNo ratings yet
- Truss ElementDocument21 pagesTruss Elementgreen77parkNo ratings yet
- One-Dimensional Elements: Before 1960, The Field of Structural Analysis Was Restricted To One-Dimensional ElementsDocument15 pagesOne-Dimensional Elements: Before 1960, The Field of Structural Analysis Was Restricted To One-Dimensional ElementsRondro Ny Aina LuciaNo ratings yet
- Fem NotesDocument11 pagesFem NotesvenkiteshksNo ratings yet
- FEM For 3D Solids (Finite Element Method) Part 1Document14 pagesFEM For 3D Solids (Finite Element Method) Part 1Ali Majd LaftaNo ratings yet
- Aim:-Study of FEM (Finite Element Method) Finite-Element MethodDocument9 pagesAim:-Study of FEM (Finite Element Method) Finite-Element MethodAshley Silvester AnthonyNo ratings yet
- Farabi - Dynamicstudyofat - Dynamicstudyofat 35413307Document7 pagesFarabi - Dynamicstudyofat - Dynamicstudyofat 35413307Anonymous 80p9OVNo ratings yet
- C 5 O - F E S F: Hapter NE Dimensional Inite Lement Hape UnctionsDocument48 pagesC 5 O - F E S F: Hapter NE Dimensional Inite Lement Hape UnctionsElmar CuellarNo ratings yet
- Finite Element Method Chapter 4 - The DSMDocument17 pagesFinite Element Method Chapter 4 - The DSMsteven_gogNo ratings yet
- Fem 2marksDocument33 pagesFem 2marksSudeepHandikherkarNo ratings yet
- The Material Obeys Hooke's Law. 3. Forces Are Applied Only at The Ends of The Bar. 4. The Bar Supports Axial Loading Only Bending, Torsion, and Shear Are NotDocument16 pagesThe Material Obeys Hooke's Law. 3. Forces Are Applied Only at The Ends of The Bar. 4. The Bar Supports Axial Loading Only Bending, Torsion, and Shear Are NotMuket AgmasNo ratings yet
- Practical Finite Element Modeling in Earth Science using MatlabFrom EverandPractical Finite Element Modeling in Earth Science using MatlabNo ratings yet
- Dynamics of Lattice MaterialsFrom EverandDynamics of Lattice MaterialsA. Srikantha PhaniNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
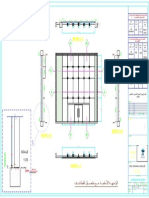
- Details of Design Spider GlassDocument1 pageDetails of Design Spider GlassEng.Hesham AL-HelaleeNo ratings yet
- Chapter 8. Admixtures 281Document1 pageChapter 8. Admixtures 281Eng.Hesham AL-HelaleeNo ratings yet
- 16 Microstructure and Properties of Hardened ConcreteDocument1 page16 Microstructure and Properties of Hardened ConcreteEng.Hesham AL-HelaleeNo ratings yet
- 12 Microstructure and Properties of Hardened ConcreteDocument1 page12 Microstructure and Properties of Hardened ConcreteEng.Hesham AL-HelaleeNo ratings yet
- SteelDesign Composite Fu NewDocument6 pagesSteelDesign Composite Fu NewEng.Hesham AL-HelaleeNo ratings yet
- CH1 An Introduction To The Finite Element Method - v2Document21 pagesCH1 An Introduction To The Finite Element Method - v2Eng.Hesham AL-HelaleeNo ratings yet
- PreviewDocument1 pagePreviewEng.Hesham AL-HelaleeNo ratings yet
- P.K.Metha CONCRETE - Microstructure Properties and Materials - 34Document1 pageP.K.Metha CONCRETE - Microstructure Properties and Materials - 34Eng.Hesham AL-HelaleeNo ratings yet
- المعدله التحليل العددي الى تاريخ3.11.2019 اDocument1 pageالمعدله التحليل العددي الى تاريخ3.11.2019 اEng.Hesham AL-HelaleeNo ratings yet
- Structural Strengtheningrepair of Reinforced Concrete RC Beams by Different Fiberreinforced Cementitious Materials A STDocument15 pagesStructural Strengtheningrepair of Reinforced Concrete RC Beams by Different Fiberreinforced Cementitious Materials A STEng.Hesham AL-HelaleeNo ratings yet
- Design of Elevated TanksDocument24 pagesDesign of Elevated TanksEng.Hesham AL-HelaleeNo ratings yet
- EXAM of Engineering Mechanics Model (A)Document2 pagesEXAM of Engineering Mechanics Model (A)Eng.Hesham AL-HelaleeNo ratings yet
- Mass Concrete RMC Plum Concrete: Created By: Jay S. Singhania en No:146490306107 Civil-B Sem-5 Sir Bpti, BVNDocument36 pagesMass Concrete RMC Plum Concrete: Created By: Jay S. Singhania en No:146490306107 Civil-B Sem-5 Sir Bpti, BVNEng.Hesham AL-HelaleeNo ratings yet
- 4 6037227067454523239Document4 pages4 6037227067454523239Eng.Hesham AL-HelaleeNo ratings yet
- Negative Skin Friction: Example 11.15Document5 pagesNegative Skin Friction: Example 11.15Eng.Hesham AL-HelaleeNo ratings yet
- 4 5956424765383116754Document3 pages4 5956424765383116754Eng.Hesham AL-HelaleeNo ratings yet
- 4 6043837262641234834Document3 pages4 6043837262641234834Eng.Hesham AL-HelaleeNo ratings yet
- Glasscon Project Report - Rotschild 48 Tel Aviv IsraelDocument33 pagesGlasscon Project Report - Rotschild 48 Tel Aviv IsraelEng.Hesham AL-HelaleeNo ratings yet
- Beam.: Note:-Answer Ouestions OnlvDocument1 pageBeam.: Note:-Answer Ouestions OnlvEng.Hesham AL-HelaleeNo ratings yet
- 4 5956424765383116753Document9 pages4 5956424765383116753Eng.Hesham AL-HelaleeNo ratings yet
- Plastic Analysis GhaliDocument19 pagesPlastic Analysis GhaliEng.Hesham AL-HelaleeNo ratings yet
- Types of WeirsDocument8 pagesTypes of WeirsEng.Hesham AL-HelaleeNo ratings yet
- Structural and Modal Analysis of A300 Wing PDFDocument59 pagesStructural and Modal Analysis of A300 Wing PDFDarshak Bhuptani100% (2)
- 99-s38 - On Evaluation of Rotation Capacity For Reinforced Concrete BeamsDocument9 pages99-s38 - On Evaluation of Rotation Capacity For Reinforced Concrete BeamsbllldNo ratings yet
- 10.1515 - Eng 2021 0105Document7 pages10.1515 - Eng 2021 0105Mohd Shahrom IsmailNo ratings yet
- Enhancement of Fatigue Strength of SAE 9245 Steel by Shot PeeningDocument5 pagesEnhancement of Fatigue Strength of SAE 9245 Steel by Shot PeeningIttisaf Ur RehmanNo ratings yet
- Torsion of Built-Up Boxed Cold-Formed Channel SectionsDocument12 pagesTorsion of Built-Up Boxed Cold-Formed Channel Sectionsخوێندن لە ئەوروپاNo ratings yet
- Plate Stresses in STAADDocument7 pagesPlate Stresses in STAADThaung Myint OoNo ratings yet
- 2009 Simplified Procedure For Design of Liquid-Storage Combined Conical TanksDocument10 pages2009 Simplified Procedure For Design of Liquid-Storage Combined Conical Tanksmmoeini412002No ratings yet
- Continuum PhysicsDocument2 pagesContinuum Physicschristos032No ratings yet
- PHD Thesis PSantos PDFDocument338 pagesPHD Thesis PSantos PDFVo Dinh ThaoNo ratings yet
- Traction and Agricultural Tractor Tire Selection Studies.Document341 pagesTraction and Agricultural Tractor Tire Selection Studies.Justus VenterNo ratings yet
- Autofrettage in Pressure VesselsDocument28 pagesAutofrettage in Pressure Vesselssran1986No ratings yet
- Important Questions SoilDocument12 pagesImportant Questions SoilSURESHKUMAR PNo ratings yet
- FEM QuizDocument3 pagesFEM Quizmkdev2004No ratings yet
- 8 MC StructureDocument26 pages8 MC StructureNitesh KumarNo ratings yet
- AITEM 2019: Analytical Modelling of Residual Stresses in Sheet Metal Tension-LevellingDocument9 pagesAITEM 2019: Analytical Modelling of Residual Stresses in Sheet Metal Tension-LevellingTommaso MagroNo ratings yet
- ASTM D7078 - Shear Test of Composite MaterialDocument4 pagesASTM D7078 - Shear Test of Composite MaterialFARUK ELALDINo ratings yet
- Composite MaterialDocument14 pagesComposite MaterialRaghvendra Singh100% (1)
- Earthq Engng Struct Dyn - 2023 - Hamilton - Seismic Excitation of Offshore Wind Turbines and Transition Piece ResponseDocument24 pagesEarthq Engng Struct Dyn - 2023 - Hamilton - Seismic Excitation of Offshore Wind Turbines and Transition Piece ResponseBridge&StructureNo ratings yet
- Assignment No. 1 Materials Science and MetallurgyDocument2 pagesAssignment No. 1 Materials Science and MetallurgySamruddhi MirganeNo ratings yet
- Esdu 77018Document16 pagesEsdu 77018Sergey FedorinovNo ratings yet
- Elasticity 04 Isotropic HyperelasticityDocument14 pagesElasticity 04 Isotropic Hyperelasticityxaaabbb_550464353No ratings yet
- Medio Continuo 6Document210 pagesMedio Continuo 6Alexander Humpire ColquehuancaNo ratings yet
- For Forging Die Design (PDFDrive)Document233 pagesFor Forging Die Design (PDFDrive)brahim lakhachib100% (2)
- 11th Physics NEET 1 Mark Vol-2 EMDocument53 pages11th Physics NEET 1 Mark Vol-2 EMjohnsonNo ratings yet
- 1.fpso Stress AnalysisDocument2 pages1.fpso Stress AnalysisSundeepGuptaNo ratings yet
- Module 3 - Flexural Strength in Beams (WSD & Cracked Sections - Tansformed Section Method)Document5 pagesModule 3 - Flexural Strength in Beams (WSD & Cracked Sections - Tansformed Section Method)Mika Vernadeth SingNo ratings yet
- Structural Design Using Bamboo PDFDocument2 pagesStructural Design Using Bamboo PDFMakongoro MagembeNo ratings yet
- Bisha JV D 2012Document179 pagesBisha JV D 2012Danilo RojasNo ratings yet
- Pdo SP 1211Document71 pagesPdo SP 1211MuddasarNo ratings yet