You might also like
- An Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical SimulationDocument16 pagesAn Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical Simulationaviraj2006No ratings yet
- Fem NotesDocument11 pagesFem NotesvenkiteshksNo ratings yet
- FEA TheoryDocument49 pagesFEA Theoryof_switzerlandNo ratings yet
- Lecture 1Document51 pagesLecture 1MOHIT PANTNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- CHAPTER 1 - Introduction To Finite Element Analysis - V2Document45 pagesCHAPTER 1 - Introduction To Finite Element Analysis - V2Alias HedgeNo ratings yet
- Finite Element Analysis (FEA) IntroductionDocument49 pagesFinite Element Analysis (FEA) Introductionabdulla_alazzawiNo ratings yet
- FEA TheoryDocument49 pagesFEA TheoryRavi Vikrant MalhotraNo ratings yet
- Variational Methods for Boundary Value Problems for Systems of Elliptic EquationsFrom EverandVariational Methods for Boundary Value Problems for Systems of Elliptic EquationsNo ratings yet
- A New Model For Connections Between Skeletal and Continuum Structural ElementsDocument12 pagesA New Model For Connections Between Skeletal and Continuum Structural ElementsshiraNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Finite Elements Methods Lab ManualDocument50 pagesFinite Elements Methods Lab ManualMinesh PrajapatiNo ratings yet
- CAE Lab ManualDocument30 pagesCAE Lab Manualsyampnaidu100% (1)
- Correlation of A Cantilever Beam Using Beam Theory Finite Element Method and TestsDocument17 pagesCorrelation of A Cantilever Beam Using Beam Theory Finite Element Method and TestsadityaNo ratings yet
- Department of Civil EngineeringDocument13 pagesDepartment of Civil Engineeringbinodjohndas0% (1)
- Finite Element Analysis Steps in FEADocument14 pagesFinite Element Analysis Steps in FEASwami NathanNo ratings yet
- 04-Bar Elements Linear Static Analysis PDFDocument22 pages04-Bar Elements Linear Static Analysis PDFmanas batraNo ratings yet
- FEM BasicDocument70 pagesFEM Basicformech100% (1)
- Somali National University: Finite Elements Design (FEM5901)Document22 pagesSomali National University: Finite Elements Design (FEM5901)Mohamed FarmaajoNo ratings yet
- Bar Elements in 2D SpaceDocument49 pagesBar Elements in 2D SpaceMohd NasimNo ratings yet
- Introduction To Finite Element ModelingDocument5 pagesIntroduction To Finite Element Modelingmastura_rahim_3No ratings yet
- Node Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)Document32 pagesNode Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)KomarudinNo ratings yet
- Finite Element Method ME751: Mechanical IV/IIDocument23 pagesFinite Element Method ME751: Mechanical IV/IIAnamolNo ratings yet
- Introduction To FEMDocument8 pagesIntroduction To FEMChirag Ameta100% (1)
- CH4 FEM FOR TRUSSES - v2Document13 pagesCH4 FEM FOR TRUSSES - v2Eng.Hesham AL-HelaleeNo ratings yet
- Class1 Intorduction FemDocument40 pagesClass1 Intorduction FemGuru MaheshNo ratings yet
- Finite Element Modelling SoftwareDocument27 pagesFinite Element Modelling SoftwarerkNo ratings yet
- Notes For FemDocument35 pagesNotes For FemG. Somasekhar SomuNo ratings yet
- The Direct Method: Model Based Simulation of Spring SystemsDocument25 pagesThe Direct Method: Model Based Simulation of Spring SystemsHusnain100% (1)
- Introduction To Finite Element Method PDFDocument13 pagesIntroduction To Finite Element Method PDFamodhyaNo ratings yet
- Analysis of Structures Subjected to Fire Using SAFIR ProgramDocument34 pagesAnalysis of Structures Subjected to Fire Using SAFIR ProgramDaniel PedrosaNo ratings yet
- FEM - Cont. & Chapt-1 - Slide PresentationDocument10 pagesFEM - Cont. & Chapt-1 - Slide PresentationMohammed B TuseNo ratings yet
- Analysis & Design of Prestressed Shell Type Structure Using Finite Element MethodDocument7 pagesAnalysis & Design of Prestressed Shell Type Structure Using Finite Element MethodHilary WatsonNo ratings yet
- FINITE ELEMENT ANALYSIS - Unit Wise - Question Bank (Part A & B) & Unitwise - Important FormulaeDocument49 pagesFINITE ELEMENT ANALYSIS - Unit Wise - Question Bank (Part A & B) & Unitwise - Important FormulaeS A ABDUL SUKKUR83% (12)
- Introduction To Finite Element AnalysisDocument20 pagesIntroduction To Finite Element AnalysisVishnu Vardhan Reddy GangapuramNo ratings yet
- Vibration AnalysisDocument17 pagesVibration AnalysispmagrawalNo ratings yet
- ANSYS Simulation Lab ManualDocument22 pagesANSYS Simulation Lab ManualChiru MNo ratings yet
- CAE Part 1-IntroductionDocument32 pagesCAE Part 1-IntroductionFarid HosseinianNo ratings yet
- Applied Mechanics of Solids (A.f. Bower) Chapter 7 - Elastic Solutions - 7Document8 pagesApplied Mechanics of Solids (A.f. Bower) Chapter 7 - Elastic Solutions - 7ibroniNo ratings yet
- The Interpretation of The Shear Locking IN Beam ElementsDocument8 pagesThe Interpretation of The Shear Locking IN Beam ElementsankurNo ratings yet
- FEM QADocument22 pagesFEM QAAghil Buddy100% (1)
- Chapter-1 1.1 Finite Element Analysis: Discretisation, and The Assembly of Elements Is Called A MeshDocument30 pagesChapter-1 1.1 Finite Element Analysis: Discretisation, and The Assembly of Elements Is Called A MeshranjithNo ratings yet
- ME2353 Finite Element Analysis Lecture NotesDocument34 pagesME2353 Finite Element Analysis Lecture Notespgkaero100% (2)
- Introduction to Finite Element Method (FEM) by Prof. G.Sreeram ReddyDocument12 pagesIntroduction to Finite Element Method (FEM) by Prof. G.Sreeram ReddyManoj BallaNo ratings yet
- Module 1Document45 pagesModule 1MD SHAHRIARMAHMUDNo ratings yet
- History of Finite Element AnalysisDocument70 pagesHistory of Finite Element Analysisjeovan50% (2)
- ModalAnalysisOfDriveShaftUsingFEA (4 7) 839f8a01 05f1 4cb7 9692 54b24438f5c7Document4 pagesModalAnalysisOfDriveShaftUsingFEA (4 7) 839f8a01 05f1 4cb7 9692 54b24438f5c7layiro2No ratings yet
- Ifem051 w1Document18 pagesIfem051 w1derick0320No ratings yet
- CES 512: Finite Element Method Introduction, Theory, Applications & ImplementationDocument32 pagesCES 512: Finite Element Method Introduction, Theory, Applications & Implementationshamsukarim2009No ratings yet
- Viva Questions in AnsysDocument5 pagesViva Questions in AnsyssharathNo ratings yet
- Fem 2marksDocument33 pagesFem 2marksSudeepHandikherkarNo ratings yet
- Chatper 4 FEM Procedure and Spring Element PDFDocument9 pagesChatper 4 FEM Procedure and Spring Element PDFVijay SinghNo ratings yet
- Group 4 (Ap229d 3c)Document11 pagesGroup 4 (Ap229d 3c)aremyulNo ratings yet
- Contribution of Science and Technology To National DevelopmentDocument2 pagesContribution of Science and Technology To National DevelopmentAllan James DaumarNo ratings yet
- CMC 63rd Batch Class Routine for Thorax CardDocument5 pagesCMC 63rd Batch Class Routine for Thorax CardMath NewNo ratings yet
- 107 - Low Stretch Rope - 2018Document5 pages107 - Low Stretch Rope - 2018Dusan CincarNo ratings yet
- Game Theory in Economics and Beyond: Larry SamuelsonDocument26 pagesGame Theory in Economics and Beyond: Larry SamuelsonThanh Thư NguyễnNo ratings yet
- Lab 4B Moles of Iron and CopperDocument6 pagesLab 4B Moles of Iron and CopperLaura Sitar0% (1)
- Renowned Professors in RussiaDocument5 pagesRenowned Professors in RussiaAfias Thomas MatheNo ratings yet
- Add Math SbaDocument17 pagesAdd Math SbaYana TvNo ratings yet
- ECG Synthtetic - Cloudias - 07311840000004Document8 pagesECG Synthtetic - Cloudias - 07311840000004Wheel ChairNo ratings yet
- DLL All Subjects 2 q4 w8 d2Document8 pagesDLL All Subjects 2 q4 w8 d2Kinder DarpingNo ratings yet
- REVISED SYLLABUS Assessment of Learning 1Document7 pagesREVISED SYLLABUS Assessment of Learning 1FLORIFE CABANGON100% (1)
- BJT Mkwi4201 Bahasa InggrisDocument3 pagesBJT Mkwi4201 Bahasa Inggrisnatalia walunNo ratings yet
- Dosi ResDocument2 pagesDosi Resapi-270166579No ratings yet
- An Ecological Approach For Social Work PracticeDocument11 pagesAn Ecological Approach For Social Work PracticeJona MempinNo ratings yet
- Unit 5.2Document4 pagesUnit 5.2Hanh TranNo ratings yet
- LEED AP ND Candidate Handbook - SFLBDocument32 pagesLEED AP ND Candidate Handbook - SFLBPERVEZ AHMAD KHANNo ratings yet
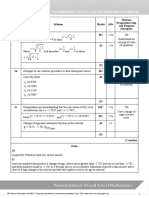
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- Produk Fermentasi Tradisional Indonesia Berbahan Dasar Pangan Hewani (Daging Dan Ikan) : A ReviewDocument15 pagesProduk Fermentasi Tradisional Indonesia Berbahan Dasar Pangan Hewani (Daging Dan Ikan) : A Reviewfebriani masrilNo ratings yet
- Lesson 1: Organs of Speech and Phonemic SymbolsDocument5 pagesLesson 1: Organs of Speech and Phonemic Symbolsnoah granja2No ratings yet
- LetterDocument5 pagesLetterSameer NaveenaNo ratings yet
- Jeann A. Gildo Bsed-Math IiiDocument3 pagesJeann A. Gildo Bsed-Math IiiJeann GildoNo ratings yet
- Wellington Secondary College: All Orders To Be Completed Online atDocument3 pagesWellington Secondary College: All Orders To Be Completed Online atMathusan LakshmanNo ratings yet
- Chapter 15-Pipe Drains PDFDocument33 pagesChapter 15-Pipe Drains PDFjpmega004524No ratings yet
- International Review of Research in Open and Distributed LearningDocument12 pagesInternational Review of Research in Open and Distributed LearningMc. Jordan QuilangNo ratings yet
- Watching A Typhoon Using Sentinel-1Document39 pagesWatching A Typhoon Using Sentinel-1James GulreyNo ratings yet
- Measures of DispersionDocument16 pagesMeasures of DispersionjbshjcbsdnNo ratings yet
- Warehouse SimulationDocument14 pagesWarehouse SimulationRISHAB KABDI JAINNo ratings yet
- DRRMQ 3 W1Document44 pagesDRRMQ 3 W1Edelmar BenosaNo ratings yet
- 1 - Introduction To AggregateDocument22 pages1 - Introduction To AggregateFatin HazwaniNo ratings yet
- Data Sheet: PhotodiodesDocument22 pagesData Sheet: PhotodiodesDavid Nasael VERGARANo ratings yet