You might also like
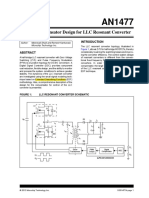
- AN14177, Digital Compensator Design For LLC Resonant Converter DS00001477BDocument32 pagesAN14177, Digital Compensator Design For LLC Resonant Converter DS00001477BLab EvseNo ratings yet
- AN4134 Designing Forward SmpsDocument14 pagesAN4134 Designing Forward SmpsGrzegorz WegnerNo ratings yet
- Optimize Output Filter On D-CAP2™ For Stability Improvement: Application ReportDocument8 pagesOptimize Output Filter On D-CAP2™ For Stability Improvement: Application ReportLeonardo SoaresNo ratings yet
- Digital Compensator Design For LLC Resonant ConverterDocument28 pagesDigital Compensator Design For LLC Resonant ConverterVũ Hùng TrángNo ratings yet
- تصميم المحول AN4137Document32 pagesتصميم المحول AN4137Ma LhNo ratings yet
- Slva255 PDFDocument5 pagesSlva255 PDFTey Chin SoonNo ratings yet
- An 6100 PDFDocument16 pagesAn 6100 PDFjjoaquimmartinsNo ratings yet
- Wide Range Synchronous Buck Controller: FeaturesDocument36 pagesWide Range Synchronous Buck Controller: FeaturesFrancisca MouraNo ratings yet
- Tu0402switcherki2009isic 140305063756 Phpapp01Document48 pagesTu0402switcherki2009isic 140305063756 Phpapp01Udai ValluruNo ratings yet
- Stability Analysis of Sepic Converter Using Matlab-SimulinkDocument6 pagesStability Analysis of Sepic Converter Using Matlab-SimulinkHilmy AwadNo ratings yet
- Journal Jpe 16-3 402255060Document9 pagesJournal Jpe 16-3 402255060juanNo ratings yet
- Matecconf Eureca2020 02007Document12 pagesMatecconf Eureca2020 02007Lim Chia SeangNo ratings yet
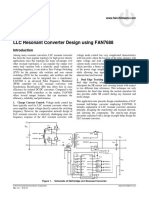
- LLC Resonant Converter Design Using FAN7688: 2. Dual Edge Tracking SR Control: FAN7688 Uses ADocument21 pagesLLC Resonant Converter Design Using FAN7688: 2. Dual Edge Tracking SR Control: FAN7688 Uses APhúc ThiệnNo ratings yet
- SCRs Make Servi-WPS OfficeDocument1 pageSCRs Make Servi-WPS OfficeRenalyn AblingNo ratings yet
- LP 08 MTCMOS Sizing MemoryDocument8 pagesLP 08 MTCMOS Sizing MemoryVishnu PatilNo ratings yet
- Compensation Design Peak Current Buck (1)Document13 pagesCompensation Design Peak Current Buck (1)salageo97No ratings yet
- ELG3135 Lab3Document4 pagesELG3135 Lab3navyach2424No ratings yet
- Design Considerations and Small Signal Modeling of The Flyback Converter Using Second Stage LC Filtering CircuitDocument6 pagesDesign Considerations and Small Signal Modeling of The Flyback Converter Using Second Stage LC Filtering CircuitDavid Isaias Jaimes ReyesNo ratings yet
- Direct_fuzzy_logic_controller_for_voltage_control_of_standalone_three_phase_inverterDocument4 pagesDirect_fuzzy_logic_controller_for_voltage_control_of_standalone_three_phase_inverterdckien2002No ratings yet
- Op Amp StabilityDocument32 pagesOp Amp Stabilityapdim79No ratings yet
- Reduction in Switching Loss of Phase-Shift Full-Bridge Converter Using PrestoMOS R60xxVNx SeriesDocument10 pagesReduction in Switching Loss of Phase-Shift Full-Bridge Converter Using PrestoMOS R60xxVNx Serieslokireddi kiran kumarNo ratings yet
- Novel Beam Designs for Compact RF MEMS Series SwitchesDocument4 pagesNovel Beam Designs for Compact RF MEMS Series SwitchesKalyani KattaNo ratings yet
- Halogen 12vDocument17 pagesHalogen 12veryNo ratings yet
- Design high frequency push-pull DC/DC converterDocument5 pagesDesign high frequency push-pull DC/DC converterEdoardoNo ratings yet
- An 4137Document22 pagesAn 4137MANOEL SAMPAIONo ratings yet
- Journal Jpe 7-1 1597982850Document8 pagesJournal Jpe 7-1 1597982850Lê Trần Bích HằngNo ratings yet
- RC Phase Shift OscillatorDocument25 pagesRC Phase Shift Oscillatorahmed omarNo ratings yet
- Ijrras 16 1 04Document15 pagesIjrras 16 1 04sea13No ratings yet
- Internal Compensation - Boon or Bane Slup174Document14 pagesInternal Compensation - Boon or Bane Slup174shrikrisNo ratings yet
- Half Bridge Converter PaperDocument6 pagesHalf Bridge Converter PaperAryaNo ratings yet
- AN149f PDFDocument22 pagesAN149f PDFranjitheee1292No ratings yet
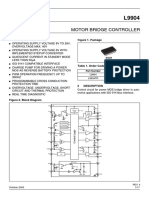
- Motor Bridge Controller: 1 Features Figure 1. PackageDocument17 pagesMotor Bridge Controller: 1 Features Figure 1. PackageNoelNo ratings yet
- Slua 253Document4 pagesSlua 253armin rahmatiNo ratings yet
- A Unified Small Signal Analysis of DC-DC Converters With Average Current Mode ControlDocument8 pagesA Unified Small Signal Analysis of DC-DC Converters With Average Current Mode ControlM UMAR ABBASINo ratings yet
- Practical Feedback Loop Design Considerations For Flyback Converter Using UCC28740Document7 pagesPractical Feedback Loop Design Considerations For Flyback Converter Using UCC28740jay lowkeyNo ratings yet
- Importance of Transient ResponseDocument7 pagesImportance of Transient ResponsePawan KumarNo ratings yet
- How To Measure The Control Loop of DCS-Control™ DevicesDocument5 pagesHow To Measure The Control Loop of DCS-Control™ DevicesZamfirMarianNo ratings yet
- Controller Design For Buck Converter Step-by-Step Approach: Swapna ManurkarDocument3 pagesController Design For Buck Converter Step-by-Step Approach: Swapna ManurkarJessica RossNo ratings yet
- Protection Coordination Report for NTPC Pakri Barwadih Coal Mining ProjectDocument36 pagesProtection Coordination Report for NTPC Pakri Barwadih Coal Mining Projectramesh cuppuNo ratings yet
- Application Note AN4146: Design Guidelines For Quasi-Resonant Converters Using FSCQ-series Fairchild Power Switch (FPS)Document24 pagesApplication Note AN4146: Design Guidelines For Quasi-Resonant Converters Using FSCQ-series Fairchild Power Switch (FPS)Anamaria OrosNo ratings yet
- Closed Loop BoostDocument4 pagesClosed Loop Boostaravind babuNo ratings yet
- Quasi-Resonant Coolset Design Guide Ice2Qrxx65/80XDocument12 pagesQuasi-Resonant Coolset Design Guide Ice2Qrxx65/80Xmaicuongdt2No ratings yet
- Design For A Discrete Charge Pump: Application ReportDocument8 pagesDesign For A Discrete Charge Pump: Application ReportDrTeethNo ratings yet
- Practical-Electronics-1973-09 Phase UnitDocument4 pagesPractical-Electronics-1973-09 Phase UnitJohan TaalanderwijsNo ratings yet
- 10 1109@apec 2019 8721851Document7 pages10 1109@apec 2019 8721851Arabindo ChandraNo ratings yet
- An 4141Document11 pagesAn 4141chatty85No ratings yet
- Data SheetDocument19 pagesData SheetRobertoBarbosaNo ratings yet
- Mto Ev005 Tb67s109aftgDocument7 pagesMto Ev005 Tb67s109aftgTrịnh Thanh TàiNo ratings yet
- An010 en PDFDocument15 pagesAn010 en PDFAnonymous Z1RHn9ENo ratings yet
- Analysis of Line Current Harmonics For Single-Phase PFC ConvertersDocument8 pagesAnalysis of Line Current Harmonics For Single-Phase PFC ConvertersBambang Yan ArdiantoNo ratings yet
- Steps To Design A PSR Flyback Converter Using AP3706 08NDocument6 pagesSteps To Design A PSR Flyback Converter Using AP3706 08Nmehdi.bzinebNo ratings yet
- BUCK DC - 5PAPER - Edited 23.10.25Document8 pagesBUCK DC - 5PAPER - Edited 23.10.25doanminhtien030903No ratings yet
- L6565 DatasheetDocument17 pagesL6565 DatasheetJose BenavidesNo ratings yet
- 1 2859 PDFDocument21 pages1 2859 PDFElmer HCNo ratings yet
- PFC Boost Calculation TI PDFDocument15 pagesPFC Boost Calculation TI PDFshawn liNo ratings yet
- Experiment 10: To Plot The Magnitude and Phase Response of A Third-Order Butterworth Low Pass FilterDocument5 pagesExperiment 10: To Plot The Magnitude and Phase Response of A Third-Order Butterworth Low Pass FilterEngr. Afshan ishaq Electronics ABTNo ratings yet
- A5268 3A, 28V, 340Khz Synchronous Rectified Step-Down ConverterDocument16 pagesA5268 3A, 28V, 340Khz Synchronous Rectified Step-Down ConverterAnderson Galarza CalderonNo ratings yet
- Replacing Electromechanical SwitchesDocument12 pagesReplacing Electromechanical Switchesccuenin777No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Solar Mobile ChargerDocument19 pagesSolar Mobile ChargerRavi JoshiNo ratings yet
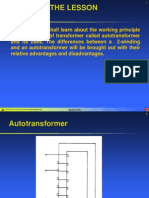
- AutotransformerDocument26 pagesAutotransformerMonika SharmaNo ratings yet
- 0132975165Document24 pages0132975165RamKumarNo ratings yet
- Managing High Voltage Lithium-Ion Batteries in HEVs - M Kultgen - EDN 2009Document8 pagesManaging High Voltage Lithium-Ion Batteries in HEVs - M Kultgen - EDN 2009rogererfredererNo ratings yet
- Kenwood Kdc-Mp408u Mp438u x492 Mp5039u Mp5539u W5041ua W5041ug W5141uay W5141ugy W5541u W5641uy Et 169Document48 pagesKenwood Kdc-Mp408u Mp438u x492 Mp5039u Mp5539u W5041ua W5041ug W5141uay W5141ugy W5541u W5641uy Et 169mrdevil83100% (1)
- ReleaseNote FileList of X456UAK WIN10 64 V2.00 LiteDocument2 pagesReleaseNote FileList of X456UAK WIN10 64 V2.00 LiteIrfan RipatNo ratings yet
- TROUBLESHOOTING RB333Document8 pagesTROUBLESHOOTING RB333John KhouryNo ratings yet
- Option Information: Vishay SemiconductorsDocument7 pagesOption Information: Vishay Semiconductorsyeysser yaminNo ratings yet
- MC68332 Hardware DesignDocument56 pagesMC68332 Hardware DesignWojtek KNo ratings yet
- Anatomy of Computer SystemDocument9 pagesAnatomy of Computer Systemfaraz100% (1)
- Butler MilDocument8 pagesButler MilJohn ErhinyoNo ratings yet
- RSM110-8-565-585BHDG IEC1500V-30mm 2023H2-1-ENDocument2 pagesRSM110-8-565-585BHDG IEC1500V-30mm 2023H2-1-ENnghenhac123vnNo ratings yet
- ACT30Document10 pagesACT30arao_filhoNo ratings yet
- Logic Probe - Tester Basics - Radio-Electronics PDFDocument3 pagesLogic Probe - Tester Basics - Radio-Electronics PDFabhishekNo ratings yet
- DC Chopper FundamentalsDocument77 pagesDC Chopper FundamentalsyogitaNo ratings yet
- 428 InfraredThermometerEmissivitytablesrevDocument10 pages428 InfraredThermometerEmissivitytablesrevBiswajitNo ratings yet
- Reversible Thermoelectric Demonstrator: BackgroundDocument2 pagesReversible Thermoelectric Demonstrator: BackgroundJosé S. MenezesNo ratings yet
- 1991 16 Bit V-Series Microprocessor Data BookDocument1,107 pages1991 16 Bit V-Series Microprocessor Data BookJean GrégoireNo ratings yet
- DMG1029SV N - P Channel FETDocument9 pagesDMG1029SV N - P Channel FETaerNo ratings yet
- Construction and Calibration of A Thermocouple - Doc ModDocument11 pagesConstruction and Calibration of A Thermocouple - Doc Modnurangetso283150% (2)
- Irs S 84-92 - SPV Module (Solar Panel)Document13 pagesIrs S 84-92 - SPV Module (Solar Panel)Vikas Srivastav0% (1)
- Punta Lógica Con Display de 7 SegmentosDocument10 pagesPunta Lógica Con Display de 7 SegmentosJorge Luis Salazar JaramilloNo ratings yet
- VHF Circuit Board Schematic Diagrams and Parts ListDocument56 pagesVHF Circuit Board Schematic Diagrams and Parts ListMiguel Martinez100% (1)
- Esab Caddy Mig C200i Service ManualDocument50 pagesEsab Caddy Mig C200i Service ManualJohn Metaxas100% (2)
- Libra Order Guide 04Document8 pagesLibra Order Guide 04Dennis Gutierrez RiojaNo ratings yet
- TIN InformationDocument14 pagesTIN InformationAin FarhanNo ratings yet
- MD1803DFP: High Voltage NPN Power Transistor For Standard Definition CRT DisplayDocument10 pagesMD1803DFP: High Voltage NPN Power Transistor For Standard Definition CRT DisplayMazmur IrwNo ratings yet
- Basic Technology J S S 3Document2 pagesBasic Technology J S S 3sulayajanny100% (1)
- BYOC E.S.V. 2-Knob Bender Kit InstructionsDocument19 pagesBYOC E.S.V. 2-Knob Bender Kit Instructionsrick_marcominiNo ratings yet
- Linear Hall Effect Sensor: FeaturesDocument4 pagesLinear Hall Effect Sensor: FeaturespurwadiNo ratings yet