You might also like
- 13459173-Komatsu Service Wa250-1lc Shop Manual Wheel Loader Workshop Repair Book PDFDocument648 pages13459173-Komatsu Service Wa250-1lc Shop Manual Wheel Loader Workshop Repair Book PDFCristian Jové Miranda95% (19)
- Taylor J R Classical Mechanics Solutions1 PDFDocument56 pagesTaylor J R Classical Mechanics Solutions1 PDFVictor PerezNo ratings yet
- Dynamic Behaviour of Electric Drives: Fundamental Torque EquationsDocument7 pagesDynamic Behaviour of Electric Drives: Fundamental Torque EquationsBerihun Engda80% (5)
- Cummins K38, KT38, KTA38 Inframe-Overhaul Engine Rebuild KitDocument2 pagesCummins K38, KT38, KTA38 Inframe-Overhaul Engine Rebuild Kitfelix amador100% (2)
- 2D Problems of ElasticityDocument14 pages2D Problems of ElasticityRishan Joshua DsilvaNo ratings yet
- Report TemplateDocument19 pagesReport TemplateJealina Miranda SalasNo ratings yet
- Plastic ElasticityDocument23 pagesPlastic ElasticityBiggsNo ratings yet
- 03 ElasticityRectangular CompleteDocument12 pages03 ElasticityRectangular CompleterajNo ratings yet
- Chapter 5Document45 pagesChapter 5api-3729261No ratings yet
- AY2010 CE2134 Hydraulics L02 Fluid Statics & Floating BodiesDocument41 pagesAY2010 CE2134 Hydraulics L02 Fluid Statics & Floating BodiesEmily ShumNo ratings yet
- Problem Sheet 1Document5 pagesProblem Sheet 1Divyanshu KumarNo ratings yet
- Problem Sheet On KinematicsDocument4 pagesProblem Sheet On KinematicsAnkit PandaNo ratings yet
- Tut Soln WhiteDocument95 pagesTut Soln WhiteShravani KodeNo ratings yet
- Ech1 v4.0Document32 pagesEch1 v4.0Jiachian ChenNo ratings yet
- Chapter 5 Torsion: 5.1 Assumptions and Torsion Equation For General Prismatic Solid BarsDocument13 pagesChapter 5 Torsion: 5.1 Assumptions and Torsion Equation For General Prismatic Solid Barsprem adhikariNo ratings yet
- 1.2 Kinematics of Fluid Motion - The Eulerian PictureDocument4 pages1.2 Kinematics of Fluid Motion - The Eulerian PictureAntonio Perez OrtizNo ratings yet
- ES220 09 HomeworkSetSolnsS FromStone08Document88 pagesES220 09 HomeworkSetSolnsS FromStone08Jeongwon KimNo ratings yet
- Three-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeDocument9 pagesThree-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeHarsha HarNo ratings yet
- ENERGY METHODS Students' NotesDocument13 pagesENERGY METHODS Students' NotesRUGERO KeslyneNo ratings yet
- Physics 2. Electromagnetism: 1 FieldsDocument9 pagesPhysics 2. Electromagnetism: 1 FieldsOsama HassanNo ratings yet
- 2 - Plane Elasticity PDFDocument21 pages2 - Plane Elasticity PDFDheeraj KulkarniNo ratings yet
- Unit - IVDocument33 pagesUnit - IVapi-3528226820% (1)
- HW 3 KeyDocument8 pagesHW 3 Key1000ankitNo ratings yet
- 1 s2.0 S0377042706001105 MainDocument11 pages1 s2.0 S0377042706001105 MainJose Luis GiriNo ratings yet
- Lecture 3 DoneDocument9 pagesLecture 3 DoneSatyam ChoudharyNo ratings yet
- Review of Elasticity EquationsDocument52 pagesReview of Elasticity Equationsfoush bashaNo ratings yet
- Lecture 3Document15 pagesLecture 3Sid ZainNo ratings yet
- Tensão Virtual de Von Mises PDFDocument10 pagesTensão Virtual de Von Mises PDFAlexandreNo ratings yet
- A Numerical Example: SolutionDocument6 pagesA Numerical Example: Solutionreza2224No ratings yet
- Lecture 9Document5 pagesLecture 9Goura Sundar TripathyNo ratings yet
- 2.4b Bernoullis EqDocument2 pages2.4b Bernoullis EqLadymaelahry UsonNo ratings yet
- CA AA242B Ch4Document57 pagesCA AA242B Ch4Bharathi RajNo ratings yet
- Homework 3 SolutionsDocument6 pagesHomework 3 SolutionsislayerNo ratings yet
- StabilityDocument35 pagesStabilitySHIVAM KUMAR SINGHWALNo ratings yet
- ∇ σ + σ = − − ν ∂X ∂x + ∂Y ∂y ∇ σ + σ = 0.: xx yyDocument7 pages∇ σ + σ = − − ν ∂X ∂x + ∂Y ∂y ∇ σ + σ = 0.: xx yyAsheeshSharmaNo ratings yet
- MIT3 11F99 KinDocument9 pagesMIT3 11F99 KinSaptarshiNo ratings yet
- MDP3530 Lecture 3Document23 pagesMDP3530 Lecture 3Mark Nassef NaguibNo ratings yet
- BC210417807 mth622Document3 pagesBC210417807 mth622Qurat Ul AinNo ratings yet
- Analytical Solution For Fixed-Fixed Anisotropic Beam Subjected To Uniform LoadDocument6 pagesAnalytical Solution For Fixed-Fixed Anisotropic Beam Subjected To Uniform LoadAnonymous WDTFw8EKNo ratings yet
- Greens FunctionDocument11 pagesGreens FunctionsriramcNo ratings yet
- Another Proof of 6ζ (2) =π^2 Using Double Integrals - Daniele Ritelli (AMM, v120, n7, 2013)Document5 pagesAnother Proof of 6ζ (2) =π^2 Using Double Integrals - Daniele Ritelli (AMM, v120, n7, 2013)Leandro AzNo ratings yet
- Chapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X yDocument16 pagesChapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X ysakeriraq81No ratings yet
- Arfken MMCH 9 S 2 e 4Document1 pageArfken MMCH 9 S 2 e 4Alcides LucasNo ratings yet
- Shear Corr 2001 PDFDocument20 pagesShear Corr 2001 PDFCHILAKAPATI ANJANEYULUNo ratings yet
- A Consistent Beam Element Formulation Considering Shear Lag EffectDocument11 pagesA Consistent Beam Element Formulation Considering Shear Lag EffectcrusanuNo ratings yet
- Notes Prepared By: (1) Senem Ayşe HASER: ExampleDocument9 pagesNotes Prepared By: (1) Senem Ayşe HASER: ExampleanNo ratings yet
- 007 - Buku Basic Econometric Damodar N Gujarati 4th Solution-15-25Document12 pages007 - Buku Basic Econometric Damodar N Gujarati 4th Solution-15-25Kurniawan ArikaNo ratings yet
- DifferentialEquations 02 Strain Disp Eqns 2Document8 pagesDifferentialEquations 02 Strain Disp Eqns 2lipun12ka4No ratings yet
- E Dxdy + K e Dxdy 2K e Dxdy: 0 0 +y) /2 (2x +y) /2 (2x +y) /2 0 0 0 0Document3 pagesE Dxdy + K e Dxdy 2K e Dxdy: 0 0 +y) /2 (2x +y) /2 (2x +y) /2 0 0 0 0Bhargavi MopuruNo ratings yet
- Stress Balance Principles 07 Boundary Problem PDFDocument5 pagesStress Balance Principles 07 Boundary Problem PDFshravanNo ratings yet
- MATHunit 1 (2) 2Document96 pagesMATHunit 1 (2) 2SimiNo ratings yet
- Vector Calculus - Lecture - 1Document157 pagesVector Calculus - Lecture - 1Jeeya ShahNo ratings yet
- Flex Ure NotesDocument19 pagesFlex Ure Notesaniket patelNo ratings yet
- A Numerical Example: SolutionDocument4 pagesA Numerical Example: Solutionreza2224No ratings yet
- 1 Stress Analysis: Stresses and StrainsDocument18 pages1 Stress Analysis: Stresses and Strainsell_nokeNo ratings yet
- JG NoteDocument8 pagesJG NoteSakshi ChavanNo ratings yet
- MATH1500 Notes PDFDocument7 pagesMATH1500 Notes PDFruiyu liuNo ratings yet
- Lecture Note - Quantum Harmonic Oscillator PDFDocument16 pagesLecture Note - Quantum Harmonic Oscillator PDFHalmat Jalal HassanNo ratings yet
- Trapezoidal RuleDocument2 pagesTrapezoidal RuleMaajith MarzookNo ratings yet
- Patiability EquationsDocument2 pagesPatiability EquationsAham BrahmasmiNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Examples On Mathematical Induction: Trigonometry: Sin Sin 1 SinDocument11 pagesExamples On Mathematical Induction: Trigonometry: Sin Sin 1 SinAshok PradhanNo ratings yet
- COLUMMNDocument2 pagesCOLUMMNAshok PradhanNo ratings yet
- Curret 2Document2 pagesCurret 2Ashok PradhanNo ratings yet
- State Biot Servat Law and Hence Obtain An Expression For The Magnetic Induction Produced by Infinite Long Current Carrying Conductor at Any Point Near ItDocument5 pagesState Biot Servat Law and Hence Obtain An Expression For The Magnetic Induction Produced by Infinite Long Current Carrying Conductor at Any Point Near ItAshok PradhanNo ratings yet
- Moving Coil GalvanometerDocument5 pagesMoving Coil GalvanometerAshok PradhanNo ratings yet
- OpticsDocument6 pagesOpticsAshok PradhanNo ratings yet
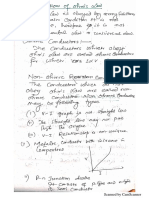
- Comparison Between Edge and Screw DislocationDocument5 pagesComparison Between Edge and Screw DislocationAshok PradhanNo ratings yet
- Current ElectricityDocument1 pageCurrent ElectricityAshok PradhanNo ratings yet
- Comparison Between Edge and Screw DislocationDocument5 pagesComparison Between Edge and Screw DislocationAshok Pradhan0% (1)
- Math 29juneDocument2 pagesMath 29juneAshok PradhanNo ratings yet
- Weekly Test PhysicsDocument2 pagesWeekly Test PhysicsAshok PradhanNo ratings yet
- Ifa 2i 8kandb 3j 4k, Then The Magnitude of A (A) 13 (B) (C) (D) 2Document1 pageIfa 2i 8kandb 3j 4k, Then The Magnitude of A (A) 13 (B) (C) (D) 2Ashok PradhanNo ratings yet
- D 102789 X 012Document12 pagesD 102789 X 012RajibNo ratings yet
- Study of Different Storage StructuresDocument18 pagesStudy of Different Storage StructuresNagaraj MehtryNo ratings yet
- Therma V 2p Leaft - FinalDocument2 pagesTherma V 2p Leaft - FinalpredragstojicicNo ratings yet
- Chapter 06Document55 pagesChapter 06Bảo Tín TrầnNo ratings yet
- 35 - Piping and Refnet Joint Selection of Installation PDFDocument6 pages35 - Piping and Refnet Joint Selection of Installation PDFJafarNo ratings yet
- FEU-Chapter 5-Shear and TorsionDocument51 pagesFEU-Chapter 5-Shear and TorsionCyril TupazNo ratings yet
- Drawing B BS 499 Part. 2Document10 pagesDrawing B BS 499 Part. 2محمد اظهرNo ratings yet
- Cloud & Pour PointsDocument9 pagesCloud & Pour PointsMuhammed Fuad100% (1)
- Jonathan Sauder: Objective EducationDocument2 pagesJonathan Sauder: Objective Educationk_andy803No ratings yet
- DM GN0001 08 EngDocument118 pagesDM GN0001 08 EngMichael MorrowNo ratings yet
- Honda GX200T2 Shop Manual Supplement Print To PDFDocument3 pagesHonda GX200T2 Shop Manual Supplement Print To PDFMe HereNo ratings yet
- Beauvais DC Motor LPDocument15 pagesBeauvais DC Motor LPPak TamNo ratings yet
- PAUT ProbeDocument8 pagesPAUT ProbeGetapo Ramin100% (1)
- CAPD Lab PDFDocument37 pagesCAPD Lab PDFJaimish SNo ratings yet
- Continuous Band Sealer Instruction Manual: Distributed byDocument42 pagesContinuous Band Sealer Instruction Manual: Distributed byArturo R. MalavéNo ratings yet
- 32-40-03 - Brake Fluid Reservoir Orifice - CleaningpaintingDocument1 page32-40-03 - Brake Fluid Reservoir Orifice - CleaningpaintingDAVID QUINONo ratings yet
- Ss 2 Physics Lesson Note Term 1Document68 pagesSs 2 Physics Lesson Note Term 1Musa IsyakuNo ratings yet
- Suspension Analysis Using MSC AdamsDocument18 pagesSuspension Analysis Using MSC AdamsJim Harris100% (1)
- TP PDFDocument1 pageTP PDFRîkèñ PâtélNo ratings yet
- Trent 700 73-Aj366Document246 pagesTrent 700 73-Aj366ArabyAbdel Hamed Sadek100% (1)
- Simmerrings PDFDocument152 pagesSimmerrings PDFGogyNo ratings yet
- D10 11M-D10 11-2007PVDocument6 pagesD10 11M-D10 11-2007PVFiroj KhanNo ratings yet
- Filter Overview With Service Intervals and CapacitiesDocument2 pagesFilter Overview With Service Intervals and CapacitiesMohammad DahabNo ratings yet
- Design Hvac System For Commericail HospitalDocument145 pagesDesign Hvac System For Commericail HospitalMohammed AbdulhabibNo ratings yet
- King Abdulaziz International Airport Jeddah Kingdom of Saudi Arabia 1Document2 pagesKing Abdulaziz International Airport Jeddah Kingdom of Saudi Arabia 1Ahmed ElaminNo ratings yet
- Ayres S2R-T Turbo Thrush (2005)Document314 pagesAyres S2R-T Turbo Thrush (2005)Aviation/Space History Library100% (6)
- The Flow Characteristic (Hydraulic Cylinder)Document18 pagesThe Flow Characteristic (Hydraulic Cylinder)Eng-CalculationsNo ratings yet