You might also like
- My Bill DecDocument1 pageMy Bill DecRavi RanjanNo ratings yet
- Dfrws2007 GpuDocument10 pagesDfrws2007 GpuJobert AdonaNo ratings yet
- TN-1X System DescriptionDocument258 pagesTN-1X System Descriptionapi-3806249100% (2)
- Windows Intrusion Detection ChecklistDocument10 pagesWindows Intrusion Detection ChecklistJosé Tomás García CáceresNo ratings yet
- Inmos - Transputer Databook 3eDocument515 pagesInmos - Transputer Databook 3ejuggle333No ratings yet
- SPE 15360 Design, Specification, and Implementation of Drilling Operations Database ProgramDocument12 pagesSPE 15360 Design, Specification, and Implementation of Drilling Operations Database ProgramAliNo ratings yet
- Thales WATCHKEEPER WK450 (2010)Document15 pagesThales WATCHKEEPER WK450 (2010)Pedro IvanNo ratings yet
- Radar Unix: A Complete Package For GPR Data Processing: Gilles Grandjean, Herve DurandDocument9 pagesRadar Unix: A Complete Package For GPR Data Processing: Gilles Grandjean, Herve DurandGhassen LaouiniNo ratings yet
- Gis Data Capture Hardware and SoftwareDocument61 pagesGis Data Capture Hardware and SoftwareBernard100% (1)
- (Image Processing & Communications) Preprocessing of GPR DataDocument8 pages(Image Processing & Communications) Preprocessing of GPR DataWan WanNo ratings yet
- RIEGLDocument1 pageRIEGLDANIEL FERNANDO GUAMÁN GALINDONo ratings yet
- ProcessingFlow Presentation From Xsgeo-Dot-Com 1999Document6 pagesProcessingFlow Presentation From Xsgeo-Dot-Com 1999Muhammad BilalNo ratings yet
- Jifs223295 2Document25 pagesJifs223295 2John AsmaraNo ratings yet
- Analysis and Data Mining of Call Detail RecordsDocument4 pagesAnalysis and Data Mining of Call Detail RecordsRafaVelasquezNo ratings yet
- The Application of Parallel DSP Architectures To Radar Signal ProcessingDocument7 pagesThe Application of Parallel DSP Architectures To Radar Signal ProcessingphithucNo ratings yet
- Spatial Data Acquisition - Specific TheoryDocument15 pagesSpatial Data Acquisition - Specific TheoryShaifullah Bin Mat SwadiNo ratings yet
- (Image Processing Communications) Preprocessing of GPR DataDocument8 pages(Image Processing Communications) Preprocessing of GPR DataDyah Ayu MNo ratings yet
- Efficient Algorithm Design For GPR Imaging of LandminesDocument12 pagesEfficient Algorithm Design For GPR Imaging of LandminesJayesh SharmaNo ratings yet
- Applied Sciences: s2p: Provenance Research For Stream Processing SystemDocument33 pagesApplied Sciences: s2p: Provenance Research For Stream Processing SystemasdfaewNo ratings yet
- Key Ideas Behind Mapreduce 3. What Is Mapreduce? 4. Hadoop Implementation of Mapreduce 5. Anatomy of A Mapreduce Job RunDocument27 pagesKey Ideas Behind Mapreduce 3. What Is Mapreduce? 4. Hadoop Implementation of Mapreduce 5. Anatomy of A Mapreduce Job RundanisorNo ratings yet
- LIDARMagazine Graham-ThisIsHuge Vol6No3Document2 pagesLIDARMagazine Graham-ThisIsHuge Vol6No3lcm3766lNo ratings yet
- Rtes 6713Document9 pagesRtes 6713Bharath Prabhu PNo ratings yet
- Real-Time Processing of Big Data Streams: Lifecycle, Tools, Tasks, and ChallengesDocument6 pagesReal-Time Processing of Big Data Streams: Lifecycle, Tools, Tasks, and ChallengestekgucNo ratings yet
- Tech Magazine 1 1Document67 pagesTech Magazine 1 1Anil PambaNo ratings yet
- Permasense GPS PostprocessingDocument37 pagesPermasense GPS Postprocessingwn1529.20000No ratings yet
- Big Data in Oil and Gas Industry: Author: Elvirosa Brancaccio - Serintel SRL - Rome (Italy)Document16 pagesBig Data in Oil and Gas Industry: Author: Elvirosa Brancaccio - Serintel SRL - Rome (Italy)Montu PatelNo ratings yet
- Dunn 1986 DRL Ops Database 15360Document13 pagesDunn 1986 DRL Ops Database 15360Mohamed Taher FechkeurNo ratings yet
- Map Reduce On Red Green Blue ArchitectureDocument11 pagesMap Reduce On Red Green Blue ArchitectureInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- End-to-End Optimization For Geo-Distributed MapReduceDocument14 pagesEnd-to-End Optimization For Geo-Distributed MapReducemailNo ratings yet
- Common Problems in Automatic Digitization of Strong Motion AccelerogramsDocument12 pagesCommon Problems in Automatic Digitization of Strong Motion AccelerogramsJose Joaquin Lozano RadaNo ratings yet
- Parallel Data Mining Techniques On GraphDocument26 pagesParallel Data Mining Techniques On GraphbadboydhbkNo ratings yet
- Disaster Tolerant Solutions With HP 3PAR Remote Copy Software Tech White PaperDocument17 pagesDisaster Tolerant Solutions With HP 3PAR Remote Copy Software Tech White Papersaleem_mekNo ratings yet
- Reading For All ReviewDocument13 pagesReading For All ReviewxxxNo ratings yet
- Near Surface Geophysics 2015Document8 pagesNear Surface Geophysics 2015Muhammad AhsanNo ratings yet
- Data Processing For Large Database Using Mapreduce Approach Using ApsoDocument59 pagesData Processing For Large Database Using Mapreduce Approach Using ApsosumankumarNo ratings yet
- Applicability and Performance of Standard Compression Methods For Efficient Data Transmission and Storage in Radar NetworksDocument19 pagesApplicability and Performance of Standard Compression Methods For Efficient Data Transmission and Storage in Radar NetworksNicholas FeatherstonNo ratings yet
- Array Processors: An Introduction To Their Architecture, Software, and Applications in Nuclear MedicineDocument9 pagesArray Processors: An Introduction To Their Architecture, Software, and Applications in Nuclear MedicineRohan LoharNo ratings yet
- Increasing Drilling Efficiencies Through Analysis of Real-Time and Historic Drilling DataDocument3 pagesIncreasing Drilling Efficiencies Through Analysis of Real-Time and Historic Drilling DataAnonymous VNu3ODGavNo ratings yet
- MapD Technology Whitepaper Feb 2017Document15 pagesMapD Technology Whitepaper Feb 2017allanj29bNo ratings yet
- Optimal Selection of Garbage Collection Dirty Threshold To Balance Power Consumption and Space ReleaseDocument6 pagesOptimal Selection of Garbage Collection Dirty Threshold To Balance Power Consumption and Space ReleaseTatty GatitaNo ratings yet
- Capstone Reading FormatDocument1 pageCapstone Reading FormatJonbert AndamNo ratings yet
- Research Article: A Task Scheduling Strategy in Edge-Cloud Collaborative Scenario Based On DeadlineDocument9 pagesResearch Article: A Task Scheduling Strategy in Edge-Cloud Collaborative Scenario Based On DeadlineSulemanNo ratings yet
- Implementation of Reconfigurable Adaptive Filtering AlgorithmsDocument5 pagesImplementation of Reconfigurable Adaptive Filtering AlgorithmsChaitanyaNo ratings yet
- Applied Digital Documentation in The Historic EnvironmentDocument87 pagesApplied Digital Documentation in The Historic EnvironmentAllan D GrtNo ratings yet
- An Empirical Complexity Estimation For RIP Prediction: Fabio GiannettiDocument5 pagesAn Empirical Complexity Estimation For RIP Prediction: Fabio GiannettiDenitsa HadzhiyskaNo ratings yet
- Practical 1: Data Mining and Business Intelligence Practical-1Document10 pagesPractical 1: Data Mining and Business Intelligence Practical-1Dhrupad PatelNo ratings yet
- Seminar Report DSPDocument34 pagesSeminar Report DSPwmallanNo ratings yet
- The New SeismicdataprocessingDocument47 pagesThe New SeismicdataprocessingsolomonNo ratings yet
- Grades 2014Document6 pagesGrades 2014mohamed moustafaNo ratings yet
- Scheduling High Performance Data Mining Tasks On A Data Grid EnvironmentDocument12 pagesScheduling High Performance Data Mining Tasks On A Data Grid EnvironmentMeyer Al-HayaliNo ratings yet
- Spatial Data Acquisition - Specific Theory: o o o o oDocument25 pagesSpatial Data Acquisition - Specific Theory: o o o o osamuelNo ratings yet
- Big Data Meets HPCDocument3 pagesBig Data Meets HPCPeterJohn32No ratings yet
- Reviewpaper BigdataDocument14 pagesReviewpaper BigdataIgwe VictorNo ratings yet
- Lecture 3Document29 pagesLecture 3Việt Anh ĐoànNo ratings yet
- Measurement-Based Optimization of The GPRS/UMTS Core NetworkDocument21 pagesMeasurement-Based Optimization of The GPRS/UMTS Core NetworkChin Kek HongNo ratings yet
- 4 Choosing The Right DSP Processor: 4.1 Digital Signal ProcessingDocument14 pages4 Choosing The Right DSP Processor: 4.1 Digital Signal ProcessingShavel KumarNo ratings yet
- Research Article Image Processing Design and Algorithm Research Based On Cloud ComputingDocument10 pagesResearch Article Image Processing Design and Algorithm Research Based On Cloud ComputingKiruthiga PrabakaranNo ratings yet
- Review Paper: Real Time Based Data Acquisition SystemDocument2 pagesReview Paper: Real Time Based Data Acquisition SystemEditor IJRITCCNo ratings yet
- A Comprehensive Study of Map Reducing Technique in Big Data: AbstractDocument6 pagesA Comprehensive Study of Map Reducing Technique in Big Data: AbstractSarthak PandeyNo ratings yet
- Prestudy: Uppgjord (Även Faktaansvarig Om Annan) - Prepared (Also Subject Responsible If Other) NR - NoDocument7 pagesPrestudy: Uppgjord (Även Faktaansvarig Om Annan) - Prepared (Also Subject Responsible If Other) NR - Noumar saidNo ratings yet
- GPSR ThesisDocument5 pagesGPSR Thesisafcnyiatk100% (2)
- Towards Optimizing Hadoop Provisioning in The Cloud: Karthik Kambatla, Abhinav Pathak, Himabindu PuchaDocument5 pagesTowards Optimizing Hadoop Provisioning in The Cloud: Karthik Kambatla, Abhinav Pathak, Himabindu PuchachakrabhandariNo ratings yet
- EdgeDocument2 pagesEdgeLueenNo ratings yet
- Berrais Et Al-2014-Steel ConstructionDocument6 pagesBerrais Et Al-2014-Steel ConstructionkstayroskNo ratings yet
- Xerox 650 - 1300 CED v2.00Document26 pagesXerox 650 - 1300 CED v2.00Roger Rodriguez EspinozaNo ratings yet
- Altus Netoil Manual 3300833Document138 pagesAltus Netoil Manual 3300833tungluongNo ratings yet
- Full Chapter C 12 and Net 8 Modern Cross Platform Development Fundamentals Eighth Edition Mark J Price PDFDocument54 pagesFull Chapter C 12 and Net 8 Modern Cross Platform Development Fundamentals Eighth Edition Mark J Price PDFwilliam.wright166100% (1)
- MEC-4 Schedule ControlDocument16 pagesMEC-4 Schedule ControlHurram RajaNo ratings yet
- TippingPoint NX DatasheetDocument8 pagesTippingPoint NX DatasheetAbery AuNo ratings yet
- Microsoft Dynamics GP How To Determine, Maintain, and Report Accurate Costing in InventoryDocument10 pagesMicrosoft Dynamics GP How To Determine, Maintain, and Report Accurate Costing in InventoryMichael NashNo ratings yet
- 1.1 Objective: Knowledge Based Community Sharing SystemDocument90 pages1.1 Objective: Knowledge Based Community Sharing SystemSuresh DhamathotiNo ratings yet
- Kaif Hacken AuditDocument14 pagesKaif Hacken AuditKeon WeukNo ratings yet
- Model Number Key Serial Number Prefixes: NETSCOUT Data Source Hardware Model HistoryDocument19 pagesModel Number Key Serial Number Prefixes: NETSCOUT Data Source Hardware Model HistoryJames WangNo ratings yet
- SHA-3 and The Hash Function Keccak: Christof Paar Jan PelzlDocument21 pagesSHA-3 and The Hash Function Keccak: Christof Paar Jan PelzlAndy AcctNo ratings yet
- Cyberdeck TáblázatDocument3 pagesCyberdeck TáblázatmaszerkNo ratings yet
- AutoCAD 2016 English-Brazilian Portuguese Commands and Aliases ListDocument20 pagesAutoCAD 2016 English-Brazilian Portuguese Commands and Aliases ListPaulo BisattoNo ratings yet
- Unit 2 - 1 Computer Application-IiiDocument10 pagesUnit 2 - 1 Computer Application-Iiirahuldodiyat001No ratings yet
- Spring 2016 Registration Aid and Selected ElectivesDocument3 pagesSpring 2016 Registration Aid and Selected ElectivesAmanNo ratings yet
- Sony Ericsson Secret MenuDocument2 pagesSony Ericsson Secret MenuZeljana MaksicNo ratings yet
- Open Source-ERP in The Cloud Within An Eco-Sytem Generating Win-Win-Situation ForDocument13 pagesOpen Source-ERP in The Cloud Within An Eco-Sytem Generating Win-Win-Situation ForHarisfazillah JamelNo ratings yet
- A Research Paper On "Cryptonik" (A Live Crypto Currency Tracker)Document6 pagesA Research Paper On "Cryptonik" (A Live Crypto Currency Tracker)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Chapter 1 NotesDocument18 pagesChapter 1 Noteskiccha suriNo ratings yet
- qmc122 Mold Magnetic Clamping enDocument8 pagesqmc122 Mold Magnetic Clamping enAlper SakalsizNo ratings yet
- Production Planning and Control System SynopsisDocument6 pagesProduction Planning and Control System Synopsisgvani3333No ratings yet
- Laboratory Manual Course Code Ece254 Course Title: Unified Electronics Laboratory-IDocument67 pagesLaboratory Manual Course Code Ece254 Course Title: Unified Electronics Laboratory-IKaran SainiNo ratings yet
- 8051flash Programmer Manual v100Document12 pages8051flash Programmer Manual v100andy_tatteNo ratings yet
- Jurnal Scopus - Ida Bagus Brahmanda Kumala Diva - 1807531141Document25 pagesJurnal Scopus - Ida Bagus Brahmanda Kumala Diva - 1807531141hahaha123No ratings yet
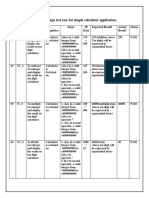
- Experiment No .3-Design Test Case For Simple Calculator ApplicationDocument2 pagesExperiment No .3-Design Test Case For Simple Calculator ApplicationAbrar NadafNo ratings yet
- Checklist For 25 ApplicationDocument1 pageChecklist For 25 ApplicationoghaleNo ratings yet