You might also like
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Coherent Automotive Radar Networks The Next Generation of Radar-Based Imaging and MappingDocument15 pagesCoherent Automotive Radar Networks The Next Generation of Radar-Based Imaging and MappingNicholas FeatherstonNo ratings yet
- Progress in Electromagnetics Research C, Vol. 11, 213-228, 2009Document16 pagesProgress in Electromagnetics Research C, Vol. 11, 213-228, 2009Karloz CondeNo ratings yet
- Qpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesDocument7 pagesQpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesHoracio KejnNo ratings yet
- Comprehensive MPoint - A Method For 3D Point Cloud Generation of Human Bodies Utilizing FMCW MIMO Mm-Wave RadarDocument21 pagesComprehensive MPoint - A Method For 3D Point Cloud Generation of Human Bodies Utilizing FMCW MIMO Mm-Wave RadaraymenbouthaalebNo ratings yet
- CRNs: Cognitive Radio Networks for Spectrum EfficiencyDocument6 pagesCRNs: Cognitive Radio Networks for Spectrum Efficiencyปิยะ ธโรNo ratings yet
- Spectrum Crowding and Cognitive Radar: Dr. Michael WicksDocument6 pagesSpectrum Crowding and Cognitive Radar: Dr. Michael WicksastefanovichNo ratings yet
- Calculating Vehicle Speed Using Wireless SensorsDocument5 pagesCalculating Vehicle Speed Using Wireless SensorsHayderNo ratings yet
- Cognitive Radio Networks AbstractDocument6 pagesCognitive Radio Networks AbstractdkishoreNo ratings yet
- A Tutorial On Joint Radar and Communication Transmission For Vehicular NetworksPart I Background and FundamentalsDocument5 pagesA Tutorial On Joint Radar and Communication Transmission For Vehicular NetworksPart I Background and FundamentalsabhilashrNo ratings yet
- Research ProposalDocument45 pagesResearch ProposalAparna MishraNo ratings yet
- Full Waveform Analysis For Long Range 3D Imaging Laser RadarDocument12 pagesFull Waveform Analysis For Long Range 3D Imaging Laser RadarmcgagliardiNo ratings yet
- Learning To Schedule Joint Radar-Communication With Deep Multi-Agent Reinforcement LearningDocument17 pagesLearning To Schedule Joint Radar-Communication With Deep Multi-Agent Reinforcement LearningNirbhay Kumar Singh ee21m521No ratings yet
- Research Article: Tool For Recovering After Meteorological Events Using A Real-Time Rem and Iot Management PlatformDocument14 pagesResearch Article: Tool For Recovering After Meteorological Events Using A Real-Time Rem and Iot Management PlatformpradiptamNo ratings yet
- Analysis of Different Routing Protocols For Wireless Dense NetworkDocument3 pagesAnalysis of Different Routing Protocols For Wireless Dense Networkعلي الورفليNo ratings yet
- Dequevedo 2018Document10 pagesDequevedo 2018Tushar ShettyNo ratings yet
- Hybrid Beamforming For Multi-Carrier Dual-Function Radar-Communication SystemDocument14 pagesHybrid Beamforming For Multi-Carrier Dual-Function Radar-Communication SystemRAVI SHANKAR JHANo ratings yet
- IJRAR1CBP194Document5 pagesIJRAR1CBP194wira jrNo ratings yet
- SDR Design With Advanced Algorithms For Cognitive RadioDocument8 pagesSDR Design With Advanced Algorithms For Cognitive RadioIJEC_EditorNo ratings yet
- Technical Seminar Report Vikas PDFDocument27 pagesTechnical Seminar Report Vikas PDFVicky RNo ratings yet
- Millimeter-Wave Technology For Automotive Radar Sensors in The 77 GHZ Frequency BandDocument16 pagesMillimeter-Wave Technology For Automotive Radar Sensors in The 77 GHZ Frequency BandSaif KamalNo ratings yet
- Caicedo 2007 SoftwareDefinedRadio ITERA-libreDocument12 pagesCaicedo 2007 SoftwareDefinedRadio ITERA-librefarzadarNo ratings yet
- Improved Target Detection Through DNN-Based Multi-Channel Interference Mitigation in Automotive RadarDocument15 pagesImproved Target Detection Through DNN-Based Multi-Channel Interference Mitigation in Automotive Radarwho3No ratings yet
- Remotesensing 14 05416Document30 pagesRemotesensing 14 05416fakeNo ratings yet
- Pixhawk_A_systeDocument6 pagesPixhawk_A_systeOM SARDESAI225286No ratings yet
- Sensors 20 07283Document21 pagesSensors 20 07283Gopinathrg19 KrishNo ratings yet
- Cognitive Radio: From Spectrum Sharing To Adaptive Learning and ReconfigurationDocument10 pagesCognitive Radio: From Spectrum Sharing To Adaptive Learning and Reconfigurationbin25No ratings yet
- 2024 Localization in Wireless Sensors NetworkDocument51 pages2024 Localization in Wireless Sensors NetworknithyadheviNo ratings yet
- Redesigning U-Net With Dense Connection and Attention Module For Satellite Based Cloud DetectionDocument10 pagesRedesigning U-Net With Dense Connection and Attention Module For Satellite Based Cloud DetectionIAES IJAINo ratings yet
- Info Com 2000Document10 pagesInfo Com 2000Li XuanjiNo ratings yet
- Sensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarDocument16 pagesSensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarfakeNo ratings yet
- Remotesensing 13 00089 v2Document23 pagesRemotesensing 13 00089 v2Varun GoradiaNo ratings yet
- Intelligent Traffic Control System For Emergency Vehicle Using RF TechnologyDocument4 pagesIntelligent Traffic Control System For Emergency Vehicle Using RF TechnologyBala GaneshNo ratings yet
- Autonomous Obstacle Avoidance and Maneuvering On A Vision-GuidedDocument6 pagesAutonomous Obstacle Avoidance and Maneuvering On A Vision-GuidedJose MontesNo ratings yet
- Application of Digital Signal Processing in Radar: A StudyDocument4 pagesApplication of Digital Signal Processing in Radar: A StudyijaertNo ratings yet
- Air Quality Monitoring Sensores in Mobile Ad-Hoc Network PDFDocument4 pagesAir Quality Monitoring Sensores in Mobile Ad-Hoc Network PDFEdison MenaNo ratings yet
- Transceiver Design For Processing of 5G Cellular SignalsDocument6 pagesTransceiver Design For Processing of 5G Cellular SignalsWahyu NarendrajatiNo ratings yet
- Deep Radar Waveform Design For Efficient Automotive Radar SensingDocument6 pagesDeep Radar Waveform Design For Efficient Automotive Radar SensingefgdfhsdNo ratings yet
- Sensors 21 07744 v2Document18 pagesSensors 21 07744 v2SamNo ratings yet
- 10 18100-Ijamec 1058257-2193753Document4 pages10 18100-Ijamec 1058257-2193753saud.ismail.etcn139No ratings yet
- Cyclostationary Detection For Ofdm in Cognitive Radio SystemsDocument113 pagesCyclostationary Detection For Ofdm in Cognitive Radio SystemsIlhem BlelNo ratings yet
- Design of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Document7 pagesDesign of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Josue Manuel Pareja ContrerasNo ratings yet
- Dod'S Perspective On Radar Open Architectures: Approved For Public Release Distribution Is UnlimitedDocument7 pagesDod'S Perspective On Radar Open Architectures: Approved For Public Release Distribution Is Unlimitedpicatchoof1No ratings yet
- Design of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Document7 pagesDesign of The Data Acquisition System Based On STM32: Information Technology and Quantitative Management (ITQM2013)Nguyễn Trọng TuyếnNo ratings yet
- Implementation of A Low Cost Synthetic Aperture Radar Using Software Defined RadioDocument7 pagesImplementation of A Low Cost Synthetic Aperture Radar Using Software Defined RadioBruno AlvimNo ratings yet
- Deep Learning-Based Drone Classification Using RadDocument10 pagesDeep Learning-Based Drone Classification Using RadYvon WongNo ratings yet
- Secure Radar-Communication Systems With Malicious Targets Integrating Radar Communications and Jamming FunctionalitiesDocument13 pagesSecure Radar-Communication Systems With Malicious Targets Integrating Radar Communications and Jamming FunctionalitiesabhilashrNo ratings yet
- Wireless Ad Hoc and Sensor Networks: Section FundingDocument4 pagesWireless Ad Hoc and Sensor Networks: Section FundingkalalidafzNo ratings yet
- Novel Wireless Sensors Network Routing Approach For Industrial Process ControlDocument8 pagesNovel Wireless Sensors Network Routing Approach For Industrial Process ControlwafaNo ratings yet
- Gas Leakage Detection and Monitoring PDFDocument5 pagesGas Leakage Detection and Monitoring PDFNationalinstituteDsnrNo ratings yet
- Thales WATCHKEEPER WK450 (2010)Document15 pagesThales WATCHKEEPER WK450 (2010)Pedro IvanNo ratings yet
- Noise Removal in Traffic Sign Detection SystemsDocument9 pagesNoise Removal in Traffic Sign Detection SystemscseijNo ratings yet
- Smart Sensor Nodes For Airborne Particulate Concentration DetectionDocument10 pagesSmart Sensor Nodes For Airborne Particulate Concentration DetectionSergio MitmaNo ratings yet
- Parallel DSP Architectures for Radar Signal ProcessingDocument7 pagesParallel DSP Architectures for Radar Signal ProcessingphithucNo ratings yet
- Wireless Sensor System Monitors MotorsDocument5 pagesWireless Sensor System Monitors MotorsAbhijeet KeerNo ratings yet
- Software-Defined Radio-Basics and Evolution To Cognitive RadioDocument9 pagesSoftware-Defined Radio-Basics and Evolution To Cognitive RadioDaniel OspinaNo ratings yet
- Performance Analysis of Short Distance Wireless Sensor Networks Using MoteviewDocument6 pagesPerformance Analysis of Short Distance Wireless Sensor Networks Using MoteviewMehboob Ul HaqNo ratings yet
- A Highly Scalable IEEE802.11p Subsystem Using Communication and Localization For Increased Vehicular SafetyDocument6 pagesA Highly Scalable IEEE802.11p Subsystem Using Communication and Localization For Increased Vehicular SafetygobinathNo ratings yet
- Europe's Dirty Little Secret_ Moroccan Slaves and a 'Sea of Plastic' - EcoWatchDocument23 pagesEurope's Dirty Little Secret_ Moroccan Slaves and a 'Sea of Plastic' - EcoWatchNicholas FeatherstonNo ratings yet
- Bark EUROPA Clean Up Week 2022Document2 pagesBark EUROPA Clean Up Week 2022Nicholas FeatherstonNo ratings yet
- Somatics Exercises - Learn Thomas Hanna's Somatics ExercisesDocument12 pagesSomatics Exercises - Learn Thomas Hanna's Somatics ExercisesNicholas Featherston0% (1)
- The Problem With Colin O'BradyDocument27 pagesThe Problem With Colin O'BradyNicholas FeatherstonNo ratings yet
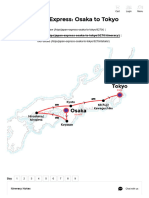
- Japan Express G AdventuresDocument8 pagesJapan Express G AdventuresNicholas FeatherstonNo ratings yet
- Biological Effects From Exposure To Electromagnetic Radiation Emitted by Cell Tower Base Stations and Other Antenna ArraysDocument27 pagesBiological Effects From Exposure To Electromagnetic Radiation Emitted by Cell Tower Base Stations and Other Antenna ArraysNicholas FeatherstonNo ratings yet
- Mohale crackDocument15 pagesMohale crackNicholas FeatherstonNo ratings yet
- Covid-19 Is A Symbol of A Much Deeper Infection - Kosmos JournalDocument23 pagesCovid-19 Is A Symbol of A Much Deeper Infection - Kosmos JournalNicholas FeatherstonNo ratings yet
- 10 Natural Ways To Build Healthy BonesDocument7 pages10 Natural Ways To Build Healthy BonesNicholas FeatherstonNo ratings yet
- Mindlin Higher Order PlatesDocument13 pagesMindlin Higher Order PlatesNicholas FeatherstonNo ratings yet
- Treatments - DrzandrebothaDocument4 pagesTreatments - DrzandrebothaNicholas FeatherstonNo ratings yet
- Rapamycin and mTOR Kinase Inhibitors 12154 - 2008 - Article - 3Document10 pagesRapamycin and mTOR Kinase Inhibitors 12154 - 2008 - Article - 3Nicholas FeatherstonNo ratings yet
- About Blank 7Document7 pagesAbout Blank 7Nicholas FeatherstonNo ratings yet
- Engineers and Paleontologists Explore Load Bearing Properties of Dinosaur Bones - HIMEDDocument3 pagesEngineers and Paleontologists Explore Load Bearing Properties of Dinosaur Bones - HIMEDNicholas FeatherstonNo ratings yet
- Knight-The Development of A Footbridge Design Through The Uk Planning Process-1024 CDocument8 pagesKnight-The Development of A Footbridge Design Through The Uk Planning Process-1024 CNicholas FeatherstonNo ratings yet
- Dinosaurs' Unique Bone Structure Key to Carrying WeightDocument3 pagesDinosaurs' Unique Bone Structure Key to Carrying WeightNicholas FeatherstonNo ratings yet
- Biolog 2015 0127Document15 pagesBiolog 2015 0127Nicholas FeatherstonNo ratings yet
- Reflecting on the Creators and Early Uses of RadioDocument7 pagesReflecting on the Creators and Early Uses of RadioNicholas FeatherstonNo ratings yet
- Terrestrial Microwave Power Beaming Demonstrates 1.6 kW at 1 kmDocument16 pagesTerrestrial Microwave Power Beaming Demonstrates 1.6 kW at 1 kmNicholas FeatherstonNo ratings yet
- Metformin Oral - Uses, Side Effects, Interactions, Pictures, Warnings & Dosing - WebMDDocument4 pagesMetformin Oral - Uses, Side Effects, Interactions, Pictures, Warnings & Dosing - WebMDNicholas FeatherstonNo ratings yet
- Dinosaur Bones - American Museum of Natural HistoryDocument7 pagesDinosaur Bones - American Museum of Natural HistoryNicholas FeatherstonNo ratings yet
- AMPK Signaling Interactive Pathway - Cell Signaling TechnologyDocument3 pagesAMPK Signaling Interactive Pathway - Cell Signaling TechnologyNicholas FeatherstonNo ratings yet
- Sensing of Life Activities at The Human-Microwave FrontierDocument13 pagesSensing of Life Activities at The Human-Microwave FrontierNicholas FeatherstonNo ratings yet
- High-Resolution Model of Human Skin Appendages For Electromagnetic Dosimetry at Millimeter WavesDocument14 pagesHigh-Resolution Model of Human Skin Appendages For Electromagnetic Dosimetry at Millimeter WavesNicholas FeatherstonNo ratings yet
- Closing The Gap Towards Super-Long Suspension Bridges Using Computational MorphogenesisDocument7 pagesClosing The Gap Towards Super-Long Suspension Bridges Using Computational MorphogenesisNicholas FeatherstonNo ratings yet
- Integral Bridges for High-Speed RailwaysDocument7 pagesIntegral Bridges for High-Speed RailwaysNicholas FeatherstonNo ratings yet
- Micrometer Sensing With Microwaves Precise Radar Systems For Innovative Measurement ApplicationsDocument16 pagesMicrometer Sensing With Microwaves Precise Radar Systems For Innovative Measurement ApplicationsNicholas FeatherstonNo ratings yet
- FULLTEXT01 Dynamic Soil-Structure Interaction AnalysisDocument106 pagesFULLTEXT01 Dynamic Soil-Structure Interaction AnalysisNicholas FeatherstonNo ratings yet
- DPCM and Delta ModulationDocument12 pagesDPCM and Delta ModulationHarikrishnan Manakara RadhakrishnanNo ratings yet
- ELEC4617Document4 pagesELEC4617Alison KongNo ratings yet
- 4 1 2 Uwb Antenne Simulation With CST Microwave StudioDocument24 pages4 1 2 Uwb Antenne Simulation With CST Microwave StudioUmair SaleemNo ratings yet
- DSP Microproject Bone PDFDocument12 pagesDSP Microproject Bone PDFBusiness principlezNo ratings yet
- Frequency Lowering Techniques in Hearing AidsDocument7 pagesFrequency Lowering Techniques in Hearing AidsKrista AshmoreNo ratings yet
- Owner Manual for SUB 8003-AS II and SUB 905-AS II Active SubwoofersDocument16 pagesOwner Manual for SUB 8003-AS II and SUB 905-AS II Active SubwoofersFaneCîmpeanNo ratings yet
- MODEL 1201 Voltage Preamplifier: Low NoiseDocument9 pagesMODEL 1201 Voltage Preamplifier: Low NoiseenticoNo ratings yet
- Audio On ARM Cortex-M ProcessorsDocument5 pagesAudio On ARM Cortex-M ProcessorsravigobiNo ratings yet
- Matchbox IIDocument2 pagesMatchbox IIRaul Angel Perez AbadNo ratings yet
- Mission Loudspeaker System Mission NXT Satellites: FS2-AV FS2Document4 pagesMission Loudspeaker System Mission NXT Satellites: FS2-AV FS2klaus allowsNo ratings yet
- Onkyo Sks-ht728 DatasheetDocument1 pageOnkyo Sks-ht728 Datasheetmttw010No ratings yet
- Fourier Theory Made Easy (?)Document30 pagesFourier Theory Made Easy (?)gaurav_juneja_4No ratings yet
- Chapter 4 Counters PDFDocument37 pagesChapter 4 Counters PDFVeyronie Buggati SteveNo ratings yet
- Design and Analysis of Analog Filters PDFDocument453 pagesDesign and Analysis of Analog Filters PDFselaroth168No ratings yet
- BIOEN 481 Stethoscope Testing ReportDocument7 pagesBIOEN 481 Stethoscope Testing ReportchaocharliehuangNo ratings yet
- Implementation of Higher-Order IIR Filter Using 8051 MicrocontrollerDocument9 pagesImplementation of Higher-Order IIR Filter Using 8051 MicrocontrollerVi PowderNo ratings yet
- Chapter 01Document55 pagesChapter 01good2000mo2357No ratings yet
- M Series: A New Standard of Performance.: A Harman International CompanyDocument2 pagesM Series: A New Standard of Performance.: A Harman International CompanyMarcello CastellucciNo ratings yet
- Ampero Effect ListDocument23 pagesAmpero Effect ListLuiz NogueiraNo ratings yet
- FFT index mappings avoid twiddle factorsDocument4 pagesFFT index mappings avoid twiddle factorsrakeshNo ratings yet
- RF OfdmDocument4 pagesRF OfdmTayyab AkhtarNo ratings yet
- GSM ReceiverDocument3 pagesGSM ReceiverTareq BakrNo ratings yet
- Monitor Audio Silver 5iDocument2 pagesMonitor Audio Silver 5ijamocasNo ratings yet
- Assignment 2 1. Extend Block Diagram: Sequence 1Document12 pagesAssignment 2 1. Extend Block Diagram: Sequence 1LuisaF.ValderramaNo ratings yet
- VTU DSP Lab Manual 5th Sem E C Matlab Programs and CCS Studio ProgramsDocument35 pagesVTU DSP Lab Manual 5th Sem E C Matlab Programs and CCS Studio ProgramsSundaram NatarajanNo ratings yet
- PSN College Aeronautical Engineering Questions BankDocument8 pagesPSN College Aeronautical Engineering Questions BankNambi RajanNo ratings yet
- Urei 539Document21 pagesUrei 539Eduardo AlamillaNo ratings yet
- Ip Chapter 3 Page 187-198Document30 pagesIp Chapter 3 Page 187-198Aliati Risma YantiNo ratings yet
- Data Sheet d6573 Feedback SuppressorDocument2 pagesData Sheet d6573 Feedback SuppressorNgo Van ThienNo ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZFrom EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZNo ratings yet
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- Practical TCP/IP and Ethernet Networking for IndustryFrom EverandPractical TCP/IP and Ethernet Networking for IndustryRating: 4 out of 5 stars4/5 (2)
- HACKING WITH KALI LINUX PENETRATION TESTING: Mastering Ethical Hacking Techniques with Kali Linux (2024 Guide for Beginners)From EverandHACKING WITH KALI LINUX PENETRATION TESTING: Mastering Ethical Hacking Techniques with Kali Linux (2024 Guide for Beginners)No ratings yet
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)