You might also like
- The Impact of 5G on Society: 5G technology can connect people, devices, infrastructures, and objects.From EverandThe Impact of 5G on Society: 5G technology can connect people, devices, infrastructures, and objects.No ratings yet
- An Internet of Things (IOT) Based Smart Parking Routing System For Smart CitiesDocument12 pagesAn Internet of Things (IOT) Based Smart Parking Routing System For Smart CitiesLMH SaadNo ratings yet
- Role of IoT-Cloud Ecosystem in Smart Cities Review and ChallengesDocument5 pagesRole of IoT-Cloud Ecosystem in Smart Cities Review and ChallengesRANGGA BAGASKARANo ratings yet
- Intelligent Parking Cloud Services Based PDFDocument6 pagesIntelligent Parking Cloud Services Based PDFNoobstaxD AhmedNo ratings yet
- Internet of Things - Smart Traffic Management System For Smart Cities Using Big Data Analytics-2017Document4 pagesInternet of Things - Smart Traffic Management System For Smart Cities Using Big Data Analytics-2017Shah AzNo ratings yet
- FINAL YEAR PROJECT PROPORSAL (R) - SafuanDocument16 pagesFINAL YEAR PROJECT PROPORSAL (R) - Safuanhaslina matzianNo ratings yet
- 10 1016@j Compeleceng 2020 106776Document13 pages10 1016@j Compeleceng 2020 106776arun rajaNo ratings yet
- s13677-024-00640-wDocument16 pagess13677-024-00640-wgtimoteo044No ratings yet
- Electronics 09 01696 v2Document17 pagesElectronics 09 01696 v2mehdi ait lhoussNo ratings yet
- 4 ElsevierDocument25 pages4 Elseviersanaz shoaieNo ratings yet
- IOt hh225565Document6 pagesIOt hh225565Anuj MehtaNo ratings yet
- Medium Access in Cloud-Based For The Internet of Things Based On Mobile Vehicular InfrastructureDocument10 pagesMedium Access in Cloud-Based For The Internet of Things Based On Mobile Vehicular InfrastructureTELKOMNIKANo ratings yet
- Onevfc-A Vehicular Fog Computation Platform For Artificial Intelligence in Internet of VehiclesDocument15 pagesOnevfc-A Vehicular Fog Computation Platform For Artificial Intelligence in Internet of VehiclesNguyễn DuyNo ratings yet
- Ieee Smart Car ParkingDocument6 pagesIeee Smart Car ParkingAishu1385No ratings yet
- Multitier Fog Computing With Large-Scale Iot Data Analytics For Smart CitiesDocument10 pagesMultitier Fog Computing With Large-Scale Iot Data Analytics For Smart Citiesdan_intel6735No ratings yet
- Internet of Things (Iot) : A Vision, Architectural Elements, and Future DirectionsDocument28 pagesInternet of Things (Iot) : A Vision, Architectural Elements, and Future DirectionsAmit DostNo ratings yet
- 07_VK_07Document10 pages07_VK_07frank2024limasNo ratings yet
- Research ArticleDocument11 pagesResearch ArticleM.Kumaresan (Thermal) Mech staffNo ratings yet
- Smart Parking System Using IoTDocument3 pagesSmart Parking System Using IoTmayur gujarNo ratings yet
- Journal of Cleaner Production: T. Perkovi C, P. Soli C, H. Zargariasl, D. Coko, Joel J.P.C. RodriguesDocument13 pagesJournal of Cleaner Production: T. Perkovi C, P. Soli C, H. Zargariasl, D. Coko, Joel J.P.C. RodriguesMehwish BilalNo ratings yet
- Research Article: Large-Scale Mobile Sensing Enabled Internet-of-Things Testbed For Smart City ServicesDocument16 pagesResearch Article: Large-Scale Mobile Sensing Enabled Internet-of-Things Testbed For Smart City ServicescontulluialexNo ratings yet
- Communication of ITSDocument5 pagesCommunication of ITSGhulam Hazrat RezaiNo ratings yet
- IOT Based Smart Vehicle Parking ManagerDocument4 pagesIOT Based Smart Vehicle Parking ManagerIJRASETPublicationsNo ratings yet
- Internet of Things Vision Future2012Document28 pagesInternet of Things Vision Future2012Phuc HoangNo ratings yet
- R&I Assignment 1Document3 pagesR&I Assignment 1oalid33No ratings yet
- Research Article: Analyzing and Evaluating Smart Cities For Iot Based On Use Cases Using The Analytic Network ProcessDocument13 pagesResearch Article: Analyzing and Evaluating Smart Cities For Iot Based On Use Cases Using The Analytic Network ProcessShahi JiNo ratings yet
- Access 2018 2887076Document19 pagesAccess 2018 2887076Getnete degemuNo ratings yet
- Synopsis G.H.Raisoni College of Engineering and ManagementDocument11 pagesSynopsis G.H.Raisoni College of Engineering and ManagementPruthviraj SuradkarNo ratings yet
- A Survey On Smart Cities' IoTDocument10 pagesA Survey On Smart Cities' IoTLe Phu Cuong B1907219No ratings yet
- PortoLivingLab An IoT-Based Sensing Platform For Smart CitiesDocument10 pagesPortoLivingLab An IoT-Based Sensing Platform For Smart CitiesNikumani ChoudhuryNo ratings yet
- Multimedia - IoT - A Survey - 48 PagesDocument49 pagesMultimedia - IoT - A Survey - 48 PagesThe Digital School OFFICIALNo ratings yet
- Big Data and Analytics For Safer Transportation PDFDocument8 pagesBig Data and Analytics For Safer Transportation PDFAndrew KuzenNo ratings yet
- 4979-Article Text-9259-1-10-20210503Document8 pages4979-Article Text-9259-1-10-20210503Mike ThomsonNo ratings yet
- Sensing Technologies For Crowd Management Adaptation and Information Dissemination in Public Transportation Systems A ReviewDocument20 pagesSensing Technologies For Crowd Management Adaptation and Information Dissemination in Public Transportation Systems A Reviewenghasan1969No ratings yet
- The Role of Cloud Computing in Smart Cities (#650464) - 861204Document5 pagesThe Role of Cloud Computing in Smart Cities (#650464) - 861204Gamlathge amila nandun jayarathnaNo ratings yet
- Context Information Sharing For The Internet of Things A SurveyDocument19 pagesContext Information Sharing For The Internet of Things A SurveyMeriem Chiraz ZouzouNo ratings yet
- I-Smacp: Iot Smart City PlanningDocument13 pagesI-Smacp: Iot Smart City Planningvenkata sivaiahNo ratings yet
- A Review Paper On Artificial Neural Network: Intelligent Traffic Management SystemDocument7 pagesA Review Paper On Artificial Neural Network: Intelligent Traffic Management SystemNIET Journal of Engineering & Technology(NIETJET)100% (1)
- 1-s2.0-S1084804520301375-mainDocument49 pages1-s2.0-S1084804520301375-mainW. Eduardo Castellanos H.No ratings yet
- Internet of Things Vision Future2012Document28 pagesInternet of Things Vision Future2012Vikram FernandezNo ratings yet
- IoT Vision and Future DirectionsDocument20 pagesIoT Vision and Future DirectionsakttripathiNo ratings yet
- Internet of Things-Enabled Smart Cities. State-Of-The-Art and Future TrendsDocument18 pagesInternet of Things-Enabled Smart Cities. State-Of-The-Art and Future TrendsJanneth TQNo ratings yet
- Intelligent Traffic System Using IoT and AgentsDocument7 pagesIntelligent Traffic System Using IoT and AgentsakashNo ratings yet
- 1 s2.0 S2665917422001581 MainDocument7 pages1 s2.0 S2665917422001581 MainSahril SaputraNo ratings yet
- A Review On IOT Based Smart GPS Device For Child and Women Safety ApplicationsDocument6 pagesA Review On IOT Based Smart GPS Device For Child and Women Safety ApplicationsAnushkaNo ratings yet
- IoT, Big Data and Mapping Services in Smart CitiesDocument2 pagesIoT, Big Data and Mapping Services in Smart CitiesShah AzNo ratings yet
- Iot Based Smart Parking System: January 2016Document6 pagesIot Based Smart Parking System: January 2016Lokesh SainiNo ratings yet
- IOT Based Parking Lot Management SystemDocument6 pagesIOT Based Parking Lot Management SystemAzeem KilledarNo ratings yet
- Centro de Enseñanza Técnica Y Superior: Iot Study CasesDocument3 pagesCentro de Enseñanza Técnica Y Superior: Iot Study CasesRoberto Quintero ENo ratings yet
- Fog Computing For Vehicular Ad-Hoc Networks: Paradigms, Scenarios, and IssuesDocument11 pagesFog Computing For Vehicular Ad-Hoc Networks: Paradigms, Scenarios, and IssuesManoj KumarNo ratings yet
- Virtual Reality Scene Modeling in The Context of Internet of ThingsDocument10 pagesVirtual Reality Scene Modeling in The Context of Internet of Thingsindaf saniaaNo ratings yet
- Iot Based Smart Parking System: January 2016Document6 pagesIot Based Smart Parking System: January 2016ShubhamMittalNo ratings yet
- Arasteh 2016Document6 pagesArasteh 2016Carina AraujoNo ratings yet
- Networking Architectures and Protocols For Smart City SystemsDocument16 pagesNetworking Architectures and Protocols For Smart City Systemssawon mahamudNo ratings yet
- Iot Applications Promise To Bring Immense Value Into Our Lives. With Newer WirelessDocument35 pagesIot Applications Promise To Bring Immense Value Into Our Lives. With Newer WirelessSaniaNo ratings yet
- An Internet of Things Based Intelligent Transportation SystemDocument6 pagesAn Internet of Things Based Intelligent Transportation SystemShaizad SayyedNo ratings yet
- Internet of Things A Comparative StudyDocument10 pagesInternet of Things A Comparative StudyِAl TuraihiNo ratings yet
- IoT Based Smart Parking SystemDocument6 pagesIoT Based Smart Parking SystemPanait MihaiNo ratings yet
- Base PaperDocument28 pagesBase Papermohan venkatNo ratings yet
- Fi & EiDocument3 pagesFi & EiPrasanna S Kulkarni100% (1)
- Lightning and Lightning ProtectionDocument5 pagesLightning and Lightning ProtectionrojofreNo ratings yet
- Orac Charts - BuenisimoDocument92 pagesOrac Charts - BuenisimosanthigiNo ratings yet
- Logicroof V-RP enDocument1 pageLogicroof V-RP enCristina DogariNo ratings yet
- Airway Management in The Critically Ill: ReviewDocument9 pagesAirway Management in The Critically Ill: ReviewQuarmina HesseNo ratings yet
- Maersk QuestionnaireDocument43 pagesMaersk QuestionnaireSahil SharmaNo ratings yet
- Entry-Exit Arrangement With Service RoadDocument1 pageEntry-Exit Arrangement With Service RoadRamBhuvan SonkarNo ratings yet
- Final Seminar ReportDocument35 pagesFinal Seminar ReportHrutik BhandareNo ratings yet
- Lmx2370/Lmx2371/Lmx2372 Pllatinum Dual Frequency Synthesizer For RF Personal CommunicationsDocument16 pagesLmx2370/Lmx2371/Lmx2372 Pllatinum Dual Frequency Synthesizer For RF Personal Communications40818248No ratings yet
- Surat Kecil Untuk TuhanDocument9 pagesSurat Kecil Untuk TuhanAsgarPurnamaNo ratings yet
- Calculation of Carbon Footprint: HouseDocument3 pagesCalculation of Carbon Footprint: HouseUmut ÇağırganNo ratings yet
- Factors to Consider in Reactor Design for Industrial ProcessesDocument3 pagesFactors to Consider in Reactor Design for Industrial Processesuma villashini100% (2)
- Labcelldivision ErikagutierrezDocument10 pagesLabcelldivision Erikagutierrezapi-336047220No ratings yet
- Quest The Last RemnantDocument67 pagesQuest The Last Remnantding suheNo ratings yet
- GTA San Andreas CheatDocument9 pagesGTA San Andreas CheatHatta YanuarNo ratings yet
- ct62010 2013Document165 pagesct62010 2013Amit Poddar100% (2)
- Engineering Services for Abadan Petrochemical Plant VCM Unloading Station Piping DesignDocument28 pagesEngineering Services for Abadan Petrochemical Plant VCM Unloading Station Piping DesignMehdi NouriNo ratings yet
- Rites of Acceptance For Altar Servers PDFDocument3 pagesRites of Acceptance For Altar Servers PDFJohn Carl Aparicio100% (1)
- Aircraft Control Systems, Basic Construction, Wing and Fuselage ConstructionDocument146 pagesAircraft Control Systems, Basic Construction, Wing and Fuselage ConstructionTAMILSELVAM NALLUSAMYNo ratings yet
- Aula 4 - Wooten - Organizational FieldsDocument28 pagesAula 4 - Wooten - Organizational FieldsferreiraccarolinaNo ratings yet
- Physical Activity Guidelines Advisory Committee ReportDocument683 pagesPhysical Activity Guidelines Advisory Committee Reportyitz22100% (1)
- HymssheetDocument4 pagesHymssheettoby_wardmanNo ratings yet
- A Study On Renewable Energy Resources in IndiaDocument39 pagesA Study On Renewable Energy Resources in IndiaDevendra SharmaNo ratings yet
- White Lies - Core RulebookDocument136 pagesWhite Lies - Core RulebookThiago AlmeidaNo ratings yet
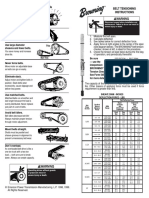
- Browning Belt Tension GaugeDocument2 pagesBrowning Belt Tension GaugeJasperken2xNo ratings yet
- Exercitii AdjectivDocument3 pagesExercitii AdjectivFirma GSCNo ratings yet
- Concept of StateDocument10 pagesConcept of StateAryansh ShuklaNo ratings yet
- ES vs SIGINT: Understanding the DifferencesDocument9 pagesES vs SIGINT: Understanding the DifferencesYasir ShigileeniNo ratings yet
- Medical Terminology TermsDocument28 pagesMedical Terminology TermsNikka Moreen DagdagNo ratings yet
- Entrepreneurship Macro Environment ForcesDocument26 pagesEntrepreneurship Macro Environment ForcesSivaNo ratings yet